
技术摘要:
本发明公开了一种磁导航射频消融导管机械臂组件、遥控装置及其控制方法。磁导航射频消融导管机械臂的遥控装置,包括:支撑结构和间隔排布于支撑结构上的多个操作键,对于多个操作键的操作适于单手完成。采用本发明,按照人体工学特点布局磁导航射频消融导管机械臂的遥 全部
背景技术:
相关技术中,针对磁导航射频消融导管机械臂的的遥控主要通过以下三种装置: 遥杆装置、滚轮装置和按键装置。遥杆装置主要用于控制磁导航射频消融导管的前进、后 退、正向旋转和反向旋转,滚轮装置主要用于完成磁导航射频消融导管的头端弯曲操作。按 键装置主要用于启动或转换操作模式、以及选择操作模式的操作幅度。然而,遥杆装置、按 键装置和滚轮装置的位置分布很随意,目的性和针对性不强,难以标准化和程序化。而且, 通常情况下需要双手操作,影响操作效率。另外,采用上述三种装置对磁导航射频消融导管 机械臂的的遥控难以规范操控模式和流程,学习培训时间长。
技术实现要素:
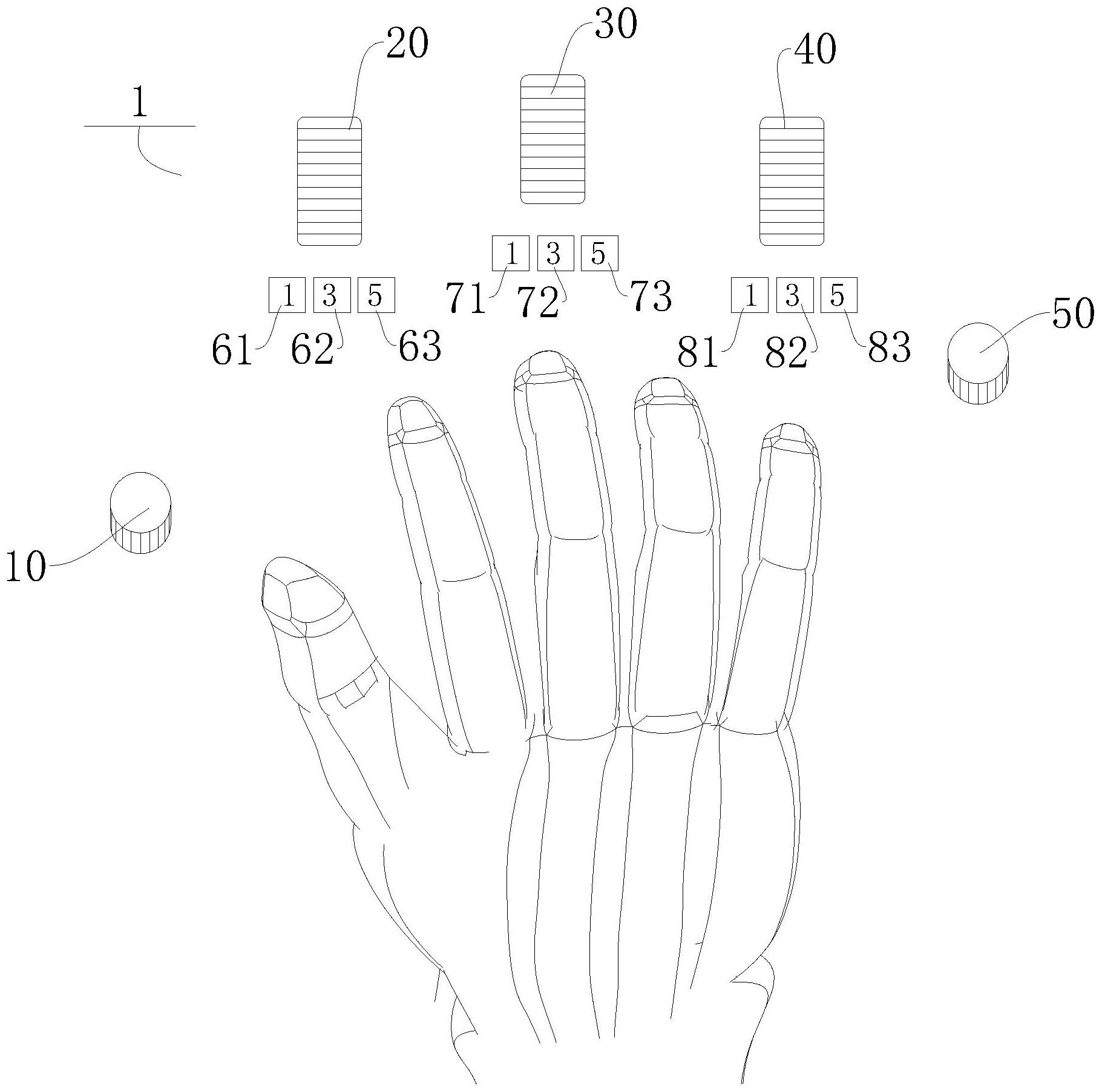
本发明实施例提供一种磁导航射频消融导管机械臂组件、遥控装置及其控制方 法,用以解决现有技术中针对磁导航射频消融导管机械臂的的遥控操作复杂的问题。 本发明实施例提出一种磁导航射频消融导管机械臂的遥控装置,包括:支撑结构 和间隔排布于所述支撑结构上的多个操作键,对于所述多个操作键的操作适于单手完成。 根据本发明的一些实施例,多个所述操作键与所述单手的多个手指一一对应,所 述多个手指中的每个手指适于操作其对应的所述操作键。 进一步的,所述多个操作键包括: 转换按钮,用于控制所述磁导航射频消融导管机械臂在手术模式和教学模式之间 切换; 进退滚轮,用于控制所述磁导航射频消融导管机械臂的进退; 旋转滚轮,用于控制所述磁导航射频消融导管机械臂的旋转; 伸缩滚轮,用于控制所述磁导航射频消融导管机械臂的伸缩; 启动按钮,用于启动所述磁导航射频消融导管机械臂。 在本发明的一些实施例中,在所述单手的长度方向上,至少满足以下尺寸设定之 一:所述进退滚轮与所述转换按钮的间距大于等于20毫米且小于等于40毫米,所述旋转滚 轮与所述进退滚轮的间距大于等于20毫米且小于等于40毫米,所述伸缩滚轮与所述旋转滚 轮的间距大于等于10毫米且小于等于30毫米,所述启动按钮与所述伸缩滚轮的间距大于等 于25毫米且小于等于45毫米; 在所述单手的宽度方向上,至少满足以下尺寸设定之一:所述进退滚轮与所述转 换按钮的间距大于等于33毫米且小于等于53毫米,所述旋转滚轮与所述进退滚轮的间距大 于等于0毫米且小于等于20毫米,所述伸缩滚轮与所述旋转滚轮的间距大于等于0毫米且小 于等于18毫米,所述启动按钮与所述伸缩滚轮的间距大于等于5毫米且小于等于25毫米。 4 CN 111544114 A 说 明 书 2/10 页 在本发明进一步的实施例中,在所述单手的长度方向上,所述进退滚轮与所述转 换按钮的间距等于30毫米,所述旋转滚轮与所述进退滚轮的间距等于30毫米,所述伸缩滚 轮与所述旋转滚轮的间距等于20毫米,所述启动按钮与所述伸缩滚轮的间距等于35毫米; 在所述单手的宽度方向上,所述进退滚轮与所述转换按钮的间距等于43毫米,所 述旋转滚轮与所述进退滚轮的间距等于10毫米,所述伸缩滚轮与所述旋转滚轮的间距等于 8毫米,所述启动按钮与所述伸缩滚轮的间距等于15毫米。 在本发明的一些实施例中,所述转换按钮与所述启动按钮的形状和大小均一致; 和/或, 所述进退滚轮、所述伸缩滚轮以及所述旋转滚轮三者的形状和大小均一致。 在本发明的一些实施例中,所述遥控装置还包括设置于所述支撑结构上的如下组 键: 进退滚轮幅度调节组键,用于调节所述磁导航射频消融导管机械臂的进退幅度; 旋转滚轮幅度调节组键,用于调节所述磁导航射频消融导管机械臂的旋转幅度; 伸缩滚轮幅度调节组键,用于调节所述磁导航射频消融导管机械臂的伸缩幅度。 在本发明进一步的实施例中,所述进退滚轮幅度调节组键位于所述进退滚轮的正 下方,所述进退滚轮幅度调节组键与所述进退滚轮的间距大于等于2毫米且小于等于10毫 米; 所述旋转滚轮幅度调节组键位于所述旋转滚轮的正下方,所述旋转滚轮幅度调节 组键与所述旋转滚轮的间距大于等于2毫米且小于等于10毫米; 所述伸缩滚轮幅度调节组键位于所述伸缩滚轮的正下方,所述伸缩滚轮幅度调节 组键与所述伸缩滚轮的间距大于等于2毫米且小于等于10毫米。 在本发明进一步的实施例中,所述进退滚轮幅度调节组键包括依次间隔排布的第 一档进退滚轮调节键、第二档进退滚轮调节键和第三档进退滚轮调节键,所述第三档进退 滚轮调节键的调节幅度大于所述第二档进退滚轮调节键,所述第二档进退滚轮调节键的调 节幅度大于所述第一档进退滚轮调节键; 所述旋转滚轮幅度调节组键包括依次间隔排布的第一档旋转滚轮调节键、第二档 旋转滚轮调节键和第三档旋转滚轮调节键,所述第三档旋转滚轮调节键的调节幅度大于所 述第二档旋转滚轮调节键,所述第二档旋转滚轮调节键的调节幅度大于所述第一档旋转滚 轮调节键; 所述伸缩滚轮幅度调节组键包括依次间隔排布的第一档伸缩滚轮调节键、第二档 伸缩滚轮调节键和第三档伸缩滚轮调节键,所述第三档伸缩滚轮调节键的调节幅度大于所 述第二档伸缩滚轮调节键,所述第二档伸缩滚轮调节键的调节幅度大于所述第一档伸缩滚 轮调节键。 本发明实施例还提出一种应用于如上所述的磁导航射频消融导管机械臂的遥控 装置的控制方法,包括: 至少一个操作键接收置于其上的单手的操作,以控制磁导航射频消融导管机械臂 的工作模式和运动方式。本发明实施例还提出一种磁导航射频消融导管机械臂组件,包括: 磁导航射频消融导管机械臂; 遥控装置,用于控制所述磁导航射频消融导管机械臂,所述遥控装置为如上所述 5 CN 111544114 A 说 明 书 3/10 页 的磁导航射频消融导管机械臂的遥控装置。 采用本发明实施例,按照人体工学特点布局磁导航射频消融导管机械臂的遥控装 置上各个操作键的位置,使得用户可以单手完成磁导航射频消融导管机械臂的操控,从而 可以提高用户的操控效率,初学者容易理解和模仿,适合教学培训且学习曲线短。 上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段, 而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够 更明显易懂,以下特举本发明的











