
技术摘要:
本发明公开了一种地图数据检查实现方法、装置和设备。所述方法包括:对地图数据按照地图场景进行分类,得到不同场景的地图数据;针对每个场景,按照该场景的检查规则对该场景的地图数据中的地图元素进行检查,确定该场景的地图数据中符合设定约束条件的高置信度数据和 全部
背景技术:
随着智能无人交通和定位技术的发展,高精度的定位已经成为可能,基于高精度 地图的无人驾驶技术也得到了飞速发展,因此对高精度地图的需求也越来越多。 高精地图是指高精度、精细化定义的地图。其精度需要达到分米级甚至厘米级才 能够区分各个车道;而精细化定义,则是需要格式化存储交通场景中的各种交通要素,包括 传统地图的道路网数据、车道网络数据、车道线以及交通标志等数据。 目前高精度地图的制作过程中需要多轮人工进行目视质检,查缺补漏,改错添对, 才能保证地图出品的品质。但是人工质检过程耗费的人力和时间成本都很高,严重影响着 高精度地图的制作效率。 高精度地图生产者都会想办法提高地图生产的效率。可以运用算法从生产阶段提 升地图生产效率,比如制作了100km的高精度地图数据,那么在质检阶段,每一轮人工质检 都需要全量的去浏览这100km数据,非常耗时。
技术实现要素:
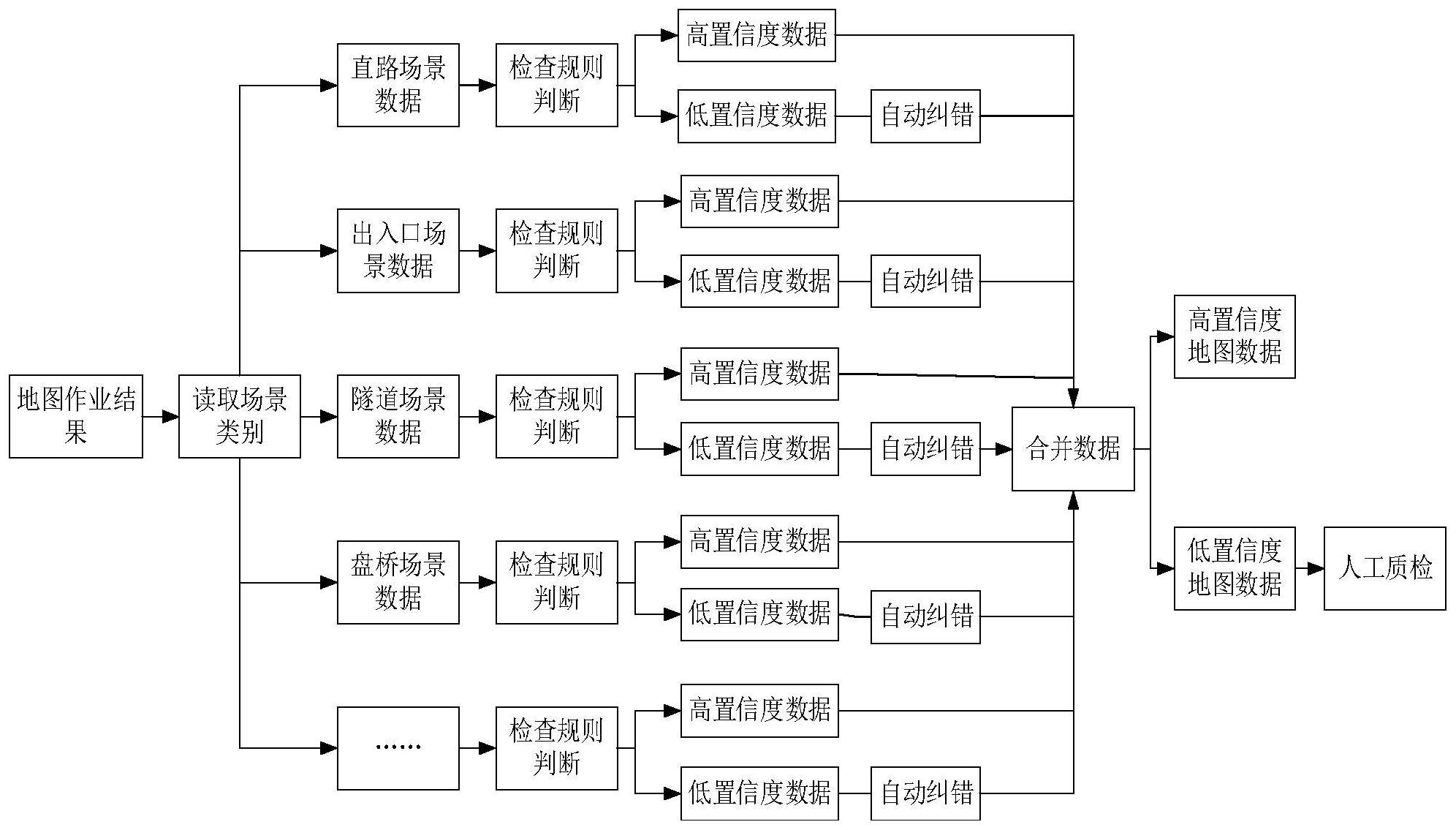
鉴于上述问题,提出了本发明以便提供一种克服上述问题或者至少部分地解决上 述问题的一种地图数据检查实现方法、装置和设备。 第一方面,本发明实施例提供一种地图数据检查实现方法,包括: 对地图数据按照地图场景进行分类,得到不同场景的地图数据; 针对每个场景,按照该场景的检查规则对该场景的地图数据中的地图元素进行检 查,确定该场景的地图数据中符合设定约束条件的高置信度数据和不符合设定约束条件的 低置信度数据; 将多个场景的地图数据中的高置信度数据和低置信度数据分别进行合并,得到无 需人工检查的高置信度地图数据和需人工检查的低置信度地图数据。 在一个可选的实施例中,按照该场景的检查规则对该场景的地图数据中的地图元 素进行检查,确定该场景的地图数据中符合设定约束条件的高置信度数据和不符合设定约 束条件的低置信度数据,包括:根据该场景的检查规则中包括的对地图元素的约束条件,判 断该场景的地图数据中的地图元素是否符合所述约束条件的要求;对符合所有约束条件要 求的部分地图数据确定为高置信度数据,对不符合任一约束条件要求的部分地图数据确定 为低置信度数据。 在一个可选的实施例中,根据该场景的检查规则中包括的对地图元素的约束条 件,判断该场景的地图数据中的地图元素是否符合所述约束条件的要求,包括下列至少一 项: 根据直路场景的检查规则中包括的约束条件,判断该场景的地图数据中的地图元 4 CN 111611329 A 说 明 书 2/10 页 素是否符合下列约束条件要求:车道数不变、车道宽度固定、车道线线型不变、车道线曲率 符合设定要求、车道线方向不变; 根据出入口场景的检查规则中包括的约束条件,判断该场景的地图数据中的地图 元素是否符合下列约束条件要求:从一侧车道增减车道数且车道按固定规律变化、车道线 线型有改变; 根据隧道场景的检查规则中包括的约束条件,判断该场景的地图数据中的地图元 素是否符合下列约束条件要求:车道数不变、车道宽度固定、车道线线型不变、车道线曲率 符合设定要求、车道线方向不变、没有马路虚标线; 根据盘桥场景的检查规则中包括的约束条件,判断该场景的地图数据中的地图元 素是否符合下列约束条件要求:车道数不变、车道宽度固定、车道线线型不变、车道线曲率 变化符合设定要求、车道线方向不变。 在一个可选的实施例中,按照该场景的检查规则对该场景的地图数据中的地图元 素进行检查,确定该场景的地图数据中符合设定约束条件的高置信度数据和不符合设定约 束条件的低置信度数据,包括:按照该场景的检查规则包括的约束条件对该场景的地图数 据中的地图元素进行检查,查找出不符合约束条件的地图数据;确定包括有不符合约束条 件的地图数据的地图数据区域为低置信度数据区域,不包括有不符合约束条件的地图数据 的地图数据区域为高置信度数据区域。 在一个可选的实施例中,确定该类别的地图数据中的高置信度数据和低置信度数 据之后,还包括:对确定出的低置信度数据进行自动纠错处理。 在一个可选的实施例中,所述对确定出的低置信度数据进行自动纠错处理,包括: 根据确定出的低置信度数据所涉及到的不符合约束条件的地图元素和该地图元素的特征 信息,对低置信度数据中涉及的不符合约束条件的地图元素进行重新描画。 第二方面,本发明实施例提供一种地图数据检查实现装置,包括: 地图场景分类模块,用于对地图数据按照地图场景进行分类,得到不同场景的地 图数据; 检查模块,用于针对每个场景,按照该场景的检查规则对该场景的地图数据中的 地图元素进行检查,确定该场景的地图数据中符合设定约束条件的高置信度数据和不符合 设定约束条件的低置信度数据; 数据合并模块,用于将多个场景的地图数据中的高置信度数据和低置信度数据分 别进行合并,得到无需人工检查的高置信度地图数据和需人工检查的低置信度地图数据。 在一个可选的实施例中,所述检查模块,具体用于:根据该场景的检查规则中包括 的对地图元素的约束条件,判断该场景的地图数据中的地图元素是否符合所述约束条件的 要求;对符合所有约束条件要求的部分地图数据确定为高置信度数据,对不符合任一约束 条件要求的部分地图数据确定为低置信度数据。 第三方面,本发明实施例提供一种计算机可读存储介质,其上存储有计算机指令, 该指令被处理器执行时实现上述的地图数据检查实现方法。 第四方面,本发明实施例提供一种检查设备,包括:存储器和处理器;其中,所述存 储器存储有计算机程序,所述程序被处理器执行时能够实现上述的地图数据检查实现方 法。 5 CN 111611329 A 说 明 书 3/10 页 本发明实施例提供的上述技术方案的有益效果至少包括: 本发明实施例的上述地图数据检查实现方法中,通过对地图数据按照地图场景进 行分类,得到不同场景的地图数据,使得在处理地图数据时更加方便高效。针对每个场景, 按照该场景的检查规则对该场景的地图数据中的地图元素进行检查,确定该场景的地图数 据中符合设定约束条件的高置信度数据和不符合设定约束条件的低置信度数据,对低置信 度数据进行自动纠错处理,在一定程度上减少了人工质检的工作量,提升了工作效率。将多 个场景的地图数据中的高置信度数据和低置信度数据分别进行合并,得到高置信度地图数 据和低置信度地图数据,并将低置信度地图数据提供给检查人员,本方案直接作用于人工 质检阶段,对于生产阶段的数据质量没有置信度的要求,能够独立判断置信度。 本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变 得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明 书、权利要求书、以及附图中所特别指出的结构来实现和获得。 下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。 附图说明 附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实 施例一起用于解释本发明,并不构成对本发明的限制。在附图中: 图1为本发明实施例中地图数据检查的基本原理示意图; 图2为本发明实施例一中地图数据检查实现方法流程图; 图3为本发明实施例二中地图数据检查实现方法的一种实例的流程图; 图4为本发明实施例二中直路场景的道路示意图; 图5为本发明实施例二中直路场景中低置信度数据区域示意图; 图6为本发明实施例二中直路场景中低置信度数据区域识别结果示意图; 图7为本发明实施例二中直路场景中低置信度数据区域自动纠错处理示意图; 图8为本发明实施例中地图数据检查实现装置结构图。











