
技术摘要:
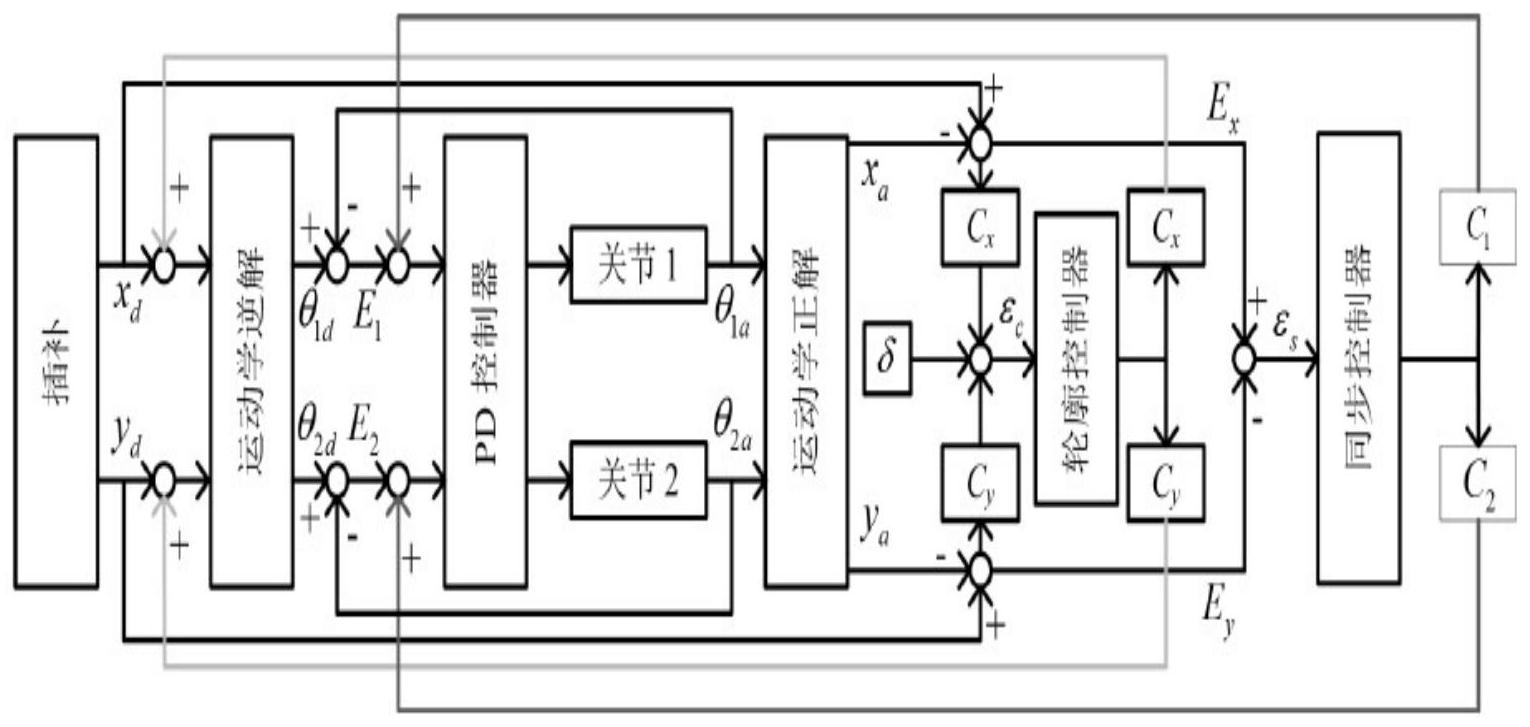
本发明公开了一种同步交叉耦合机器人轮廓控制方法,包括:获取工作空间期望位置xd、yd,对其进行运动学逆解运算,输出关节空间期望位置θ1d、θ2d;将其与关节空间实际位置θ1a、θ2a进行差值运算后,输出关节空间x轴跟踪误差E1、关节空间y轴跟踪误差E2;x轴关节空间跟 全部
背景技术:
伴随机器人控制技术的迅猛发展和机器人功能的日益完善,越来越多的机器人被 广泛应用在诸如打磨、喷涂等加工制造领域,不仅如此,对机器人运动控制精度的要求亦是 越来越高。在此情况下,机器人系统控制器的设计除了要考虑原有位置跟踪误差以外,还必 须要把轮廓误差作为衡量系统的一个重要性能指标,这就决定了在控制器设计中必须要考 虑轮廓误差的大小。然而传统的轮廓控制方法一般适用于正交结构系统或者数控机床系 统,而对于工业机器人系统轮廓控制方法的研究则是非常稀少,加之系统运动关系的非线 性性,进一步限制了传统的交叉耦合控制的直接应用范围。
技术实现要素:
本发明的目的是提供一种同步交叉耦合机器人轮廓控制方法,解决了现有技术中 存在的传统的交叉耦合控制无法应用于工业机器人系统的问题。 本发明所采用的技术方案是,一种同步交叉耦合机器人轮廓控制方法,包括以下 步骤: 步骤1、获取工作空间期望位置xd、yd,对工作空间期望位置xd、yd进行运动学逆解 运算,输出关节空间期望位置θ1d、θ2d; 步骤2、将关节空间期望位置θ1d、θ2d与关节空间实际位置θ1a、θ2a进行差值运算后, 输出关节空间x轴跟踪误差E1、关节空间y轴跟踪误差E2; 步骤3、x轴关节空间跟踪误差E1、y轴关节空间跟踪误差E2经过PD控制器运算后,驱 动电机运行,同时,根据x轴关节空间跟踪误差E1、y轴关节空间跟踪误差E2计算轮廓误差εc 分别计算轮廓误差εc、同步误差εs,轮廓误差εc通过轮廓控制器运算后,结合对应增益补偿 至工作空间的位置环,同步误差εs通过同步控制器运算后,结合对应增益补偿至关节空间 的速度环。 本发明的特点还在于: 轮廓误差εc、同步误差εs的计算方法为: 将x轴关节空间跟踪误差E1、y轴关节空间跟踪误差E2进行运动学正解运算,输出工 作空间实际位置xa、ya; 将工作空间实际位置xa、ya与工作空间期望位置xd、yd作差得到x轴跟踪误差Ex、y轴 跟踪误差Ey; 根据x轴跟踪误差Ex、y轴跟踪误差Ey计算得到轮廓误差εc、同步误差εs。 轮廓误差εc根据下式计算: εc=-ExCx EyCy δ (1); 4 CN 111590570 A 说 明 书 2/7 页 上式中,δ为轮廓误差补偿项。 当轮廓形状为线性直线时, 则轮廓误差补偿项δ=0。 当轮廓形状为曲线时,轮廓误差可根据下式计算: 上式中,R为密切圆的半径,θ为密切圆某一点切线向量与x轴的夹角; 则x轴增益Cx、y轴增益Cy为: δ=εc-εa, 轮廓误差εc通过轮廓控制器运算后,结合对应增益补偿至工作空间的位置环;具 体为:轮廓误差εc通过轮廓控制器运算后,分别乘以x轴增益Cx、y轴增益Cy补偿至工作空间 期望位置xd、yd。 同步误差εs根据下式计算: εs=Ex-Ey (9); 假设同步误差εs与x轴关节空间跟踪误差E1、y轴关节空间跟踪误差E2之间为线性 关系: εs=C1E1 C2E2 (10); 上式中,C1为x轴同步误差增益,C2为y轴同步误差增益; 已知工作空间期望位置x、y,根据运动学逆解求解关节空间位置θ1、θ2: 在工作空间实际位置(x0,y0)处: 5 CN 111590570 A 说 明 书 3/7 页 上式中四个系数分别为:A1=f′1x(x0,y0),B1=f′1y(x0,y0),A2=f′2x(x0,y0),B2= f′2y(x0,y0)。 同步误差εs通过同步控制器运算后,结合对应增益补偿至关节空间的速度环,具 体为:同步误差εs通过同步控制器运算后,分别乘以x轴同步误差增益C1、y轴同步误差增益 C2补偿至关节空间期望位置θ1d、θ2d。 本发明的有益效果是: 本发明的同步交叉耦合机器人轮廓控制方法,将传统的交叉耦合控制和PD控制相 结合,通过轮廓误差、同步误差对机器人的工作空间位置、关节空间位置进行实时补偿,得 到了适用于工业机器人系统轮廓的交叉耦合控制方法;能进一步缩小轮廓误差,提高控制 效果,进而保证机器人系统的跟踪精度。 附图说明 图1是本发明一种同步交叉耦合机器人轮廓控制方法的流程图; 图2a是位置交叉耦合机器人轮廓控制方法的一种实施例控制效果图; 图2b是本发明一种同步交叉耦合机器人轮廓控制方法的一种实施例控制效果图; 图3a是位置交叉耦合机器人轮廓控制方法的另一种实施例控制效果图; 图3b是本发明一种同步交叉耦合机器人轮廓控制方法的另一种实施例控制效果 图; 图4a是位置交叉耦合机器人轮廓控制方法的第三种实施例控制效果图; 图4b是本发明一种同步交叉耦合机器人轮廓控制方法的第三种实施例控制效果 图。











