
技术摘要:
本发明公开了一种行动载具辅助系统及其控制方法,该行动载具辅助系统包含一环境侦测装置,环境侦测装置包含有一影像撷取模块、一储存模块及一运算模块;该影像撷取模块设置于一行动载具且用以撷取该行动载具周围的环境影像;该储存模块中储存有多个图像模型。行动载具 全部
背景技术:
随着高频的商业活动以及运输物流快速的扩张发展,人们对于例如汽机车的行动 载具的依赖也越深,同时驾驶者亦越来越重视行车时的自身生命财产的保障,一般除了考 虑行动载具的性能以及乘坐的舒适性外,亦会考虑欲购买的行动载具是否提供了足够的安 全防护装置或辅助装置。在此潮流下,汽车制造商或车用设备设计厂商为了增进行车的安 全性,纷纷发展出各种行车安全防护装置或辅助装置,例如后视镜、行车记录器、可实时显 示出行车死角区域物体的环景影像或是随时记录行车路径的全球定位系统等。 此外,随着数字摄影机近年来普及于日常生活以及计算机视觉领域迅速发展的发 展,已被应用在驾驶辅助系统,希望藉由人工智能的应用降低交通事故的肇事率。 以传统后视镜举例来说,驾驶者在变换车道或是转弯时,大多利用来观察判断车 外有无物体的存在,然而特定行驶情况下大多数的后视镜存在使用上的限制与不足。例如 在夜间驾车时,驾驶者在黑暗的环境中,其眼睛瞳孔正如同照相机的快门,处于张开的状 态,以便提供视神经较多的光信号。在该种状态下,驾驶者的眼睛对于突然发生的亮光,会 产生极端敏感的反应。通常,汽车后视镜所反射来自超车或随后车辆的车前灯光,会使驾驶 者产生视觉晕眩的情形,而导致驾驶者的视觉能力在瞬间急速减低,因而增加了驾驶者对 于前方障碍变成可见时的反应时间。 此外,基于传统汽车的结构设计,导致所有后视镜本身于安装位置上存在着先天 的视线死角,使得驾驶者并无法藉由那些后视镜提供的画面,即可完整获得汽车外部环境 的实际路况,而于安全设计考虑上,仍具有待改进的缺失存在。 再者,当驾驶者欲于驾驶过程中变换车道、转弯或是倒车时,须由驾驶者变换视线 观看左后视镜或是右后视镜,才可实际了解单边车道的道路环境。然而,仅仰赖左或是右后 视镜提供的可视区域,并无法有助于驾驶者了解该左或是右后视镜所未能显示的盲区信 息,有时候尚需驾驶者直接转头检查车辆外部后方状况,抑或搭配观看车内后视镜才能完 全取得车辆外部的静、动态景象。因此,上述该多个针对驾驶车辆的特定动作时,皆需要驾 驶者不断变换视线取得路况信息,而无法适时注意各方向路况,导致容易造成车祸或碰撞 事件发生。 因此,如何有效地开发出一种将各类车内、外后视镜的可视区域,或其未能显示的 盲区信息,一并整合于一影像输出装置中显示一行车广视角影像,以供驾驶者经由单一视 线转换即可完整获取车辆外部周围环境的道路信息,进一步提高行车安全,便成为一个相 当重要的议题。 8 CN 111610613 A 说 明 书 2/46 页
技术实现要素:
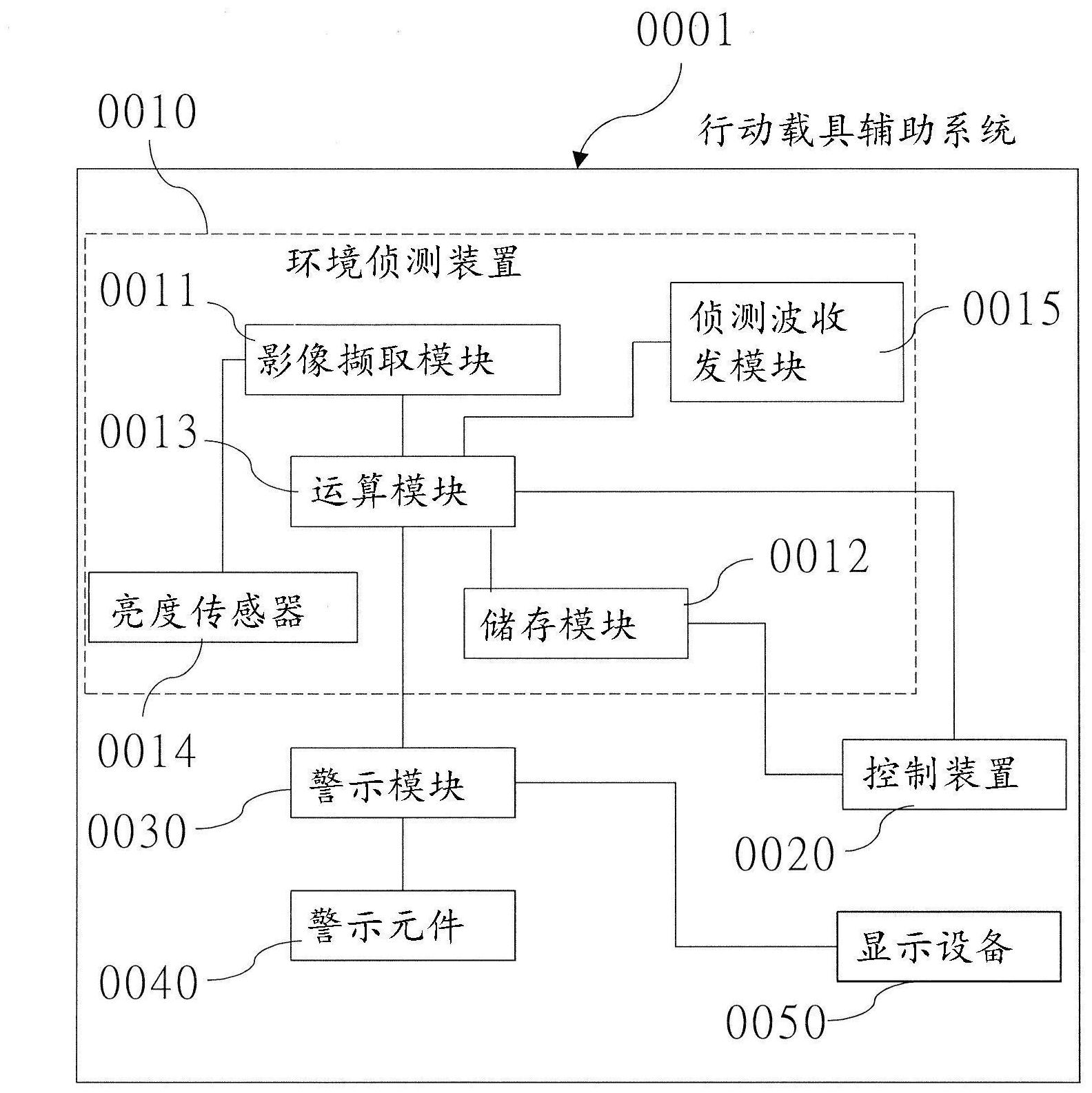
本发明实施例的态样针对一种行动载具辅助系统,其包含一环境侦测装置,其中, 该环境侦测装置包含有至少一影像撷取模块、一储存模块及一运算模块;该影像撷取模块 设置于一行动载具,用以撷取该行动载具周围的环境影像;该储存模块中储存有多个图像 模型;该运算模块电性连接该至少一影像撷取模块与该储存模块,以侦测该环境影像中是 否具有符合该多个图像模型至少其中一者的图像,并产生对应的一侦测信号;另外,该影像 撷取模块包含有一透镜组,且该透镜组包含有至少两片具有屈光力的透镜;此外,该透镜组 更满足下列条件:1.0≤f/HEP≤10.0;0deg











