
技术摘要:
行驶车控制器对在包括分岔部的行驶路径上行驶的多个行驶车中的某一个行驶车分配使其行驶到行驶路径上的目的点的指令,该行驶车控制器具有指令分配部,该指令分配部基于多个行驶车从各自的位置沿着行驶路径行驶并到达目的点为止的行驶路线候选,在多个行驶车中检测能够 全部
背景技术:
以往,已知一种行驶车控制器,其对在包括分岔部的行驶路径上行驶的多个行驶 车中的某一个行驶车分配使其行驶到行驶路径上的目的点的指令(例如参照专利文献1)。 在这种行驶车控制器中,通常向离目的点最近的行驶车分配指令。 现有技术文献 专利文献 专利文献1:日本专利第5278736号公报
技术实现要素:
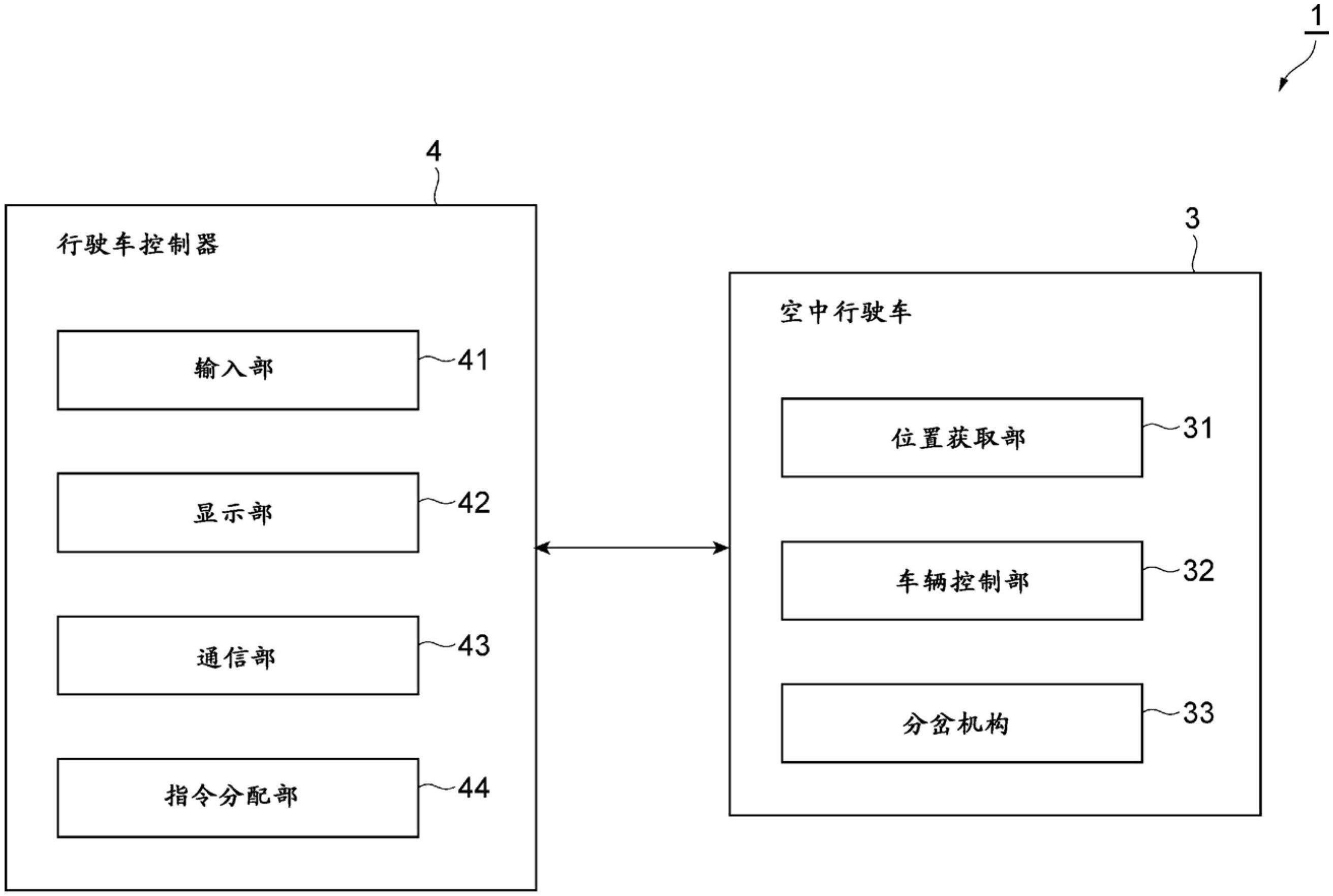
在上述行驶车控制器中,当对接近行驶路径的分岔部的行驶车分配了指令时,该 行驶车有时无法在分岔部向目的点侧切换进路而是绕行到目的点。其结果是,存在行驶车 到达目的点的时间延迟的隐患。 本发明的一个方面是鉴于上述实际情况而做出的,课题在于提供一种能够使行驶 车迅速到达目的点的行驶车控制器及行驶车系统。 本发明的一个方面的行驶车控制器对在包括分岔部的行驶路径上行驶的多个行 驶车中的某一个行驶车分配使其行驶到行驶路径上的目的点的指令,该行驶车控制器具有 指令分配部,该指令分配部基于多个行驶车从各自的位置沿着行驶路径行驶并到达目的点 为止的行驶路线候选,在多个行驶车中检测能够先到达目的点的先到达行驶车,并对先到 达行驶车分配指令,在沿行驶路径朝向分岔部行驶中的行驶车相对于该分岔部位于不可切 换分岔距离的范围内且预定在分岔部向主路径侧行进的情况下,指令分配部在先到达行驶 车的检测中执行模拟移位处理,即,视为该行驶车位于比该分岔部靠下游且是主路径侧的 位置。 在行驶中的行驶车在分岔部切换进路的情况下,例如为了分岔机构的切换而需要 与该分岔部相距比不可切换分岔距离长的距离。因此,对于在沿行驶路径朝向分岔部的行 驶中相对于该分岔部位于不可切换分岔距离的范围内的行驶车而言,难以在分岔部将进路 向分岔路侧切换(即,难以沿着进路切换后行驶路线行驶),不得不向主路径侧前进。因此, 在本发明的一个方面的行驶车控制器中,通过模拟移位处理的执行,视为该行驶车位于比 该分岔部靠下游且是主路径侧的位置。其结果是,对于相对于分岔部位于不可切换分岔距 离的范围内且预定在分岔部向主路径行进的行驶车在以该时间点为起点最初通过分岔部 时向分岔路侧前进的行驶路线而言,会被从行驶路线候选中除去。因此,能够消除被分配了 指令的行驶车无法在分岔部切换进路而是绕行到目的点的情况。能够使行驶车迅速到达目 的点。 在本发明的一个方面的行驶车控制器中,也可以是,指令分配部针对行驶路线候 3 CN 111742275 A 说 明 书 2/11 页 选分别计算行驶车行驶所需的时间值,并将与时间值最小的行驶路线候选对应的行驶车检 测为先到达行驶车。由此,能够高精度地检测先到达行驶车。 在本发明的一个方面的行驶车控制器中,也可以是,指令分配部在执行了模拟移 位处理的情况下,将在作为模拟移位处理的对象的行驶车的模拟位置与该行驶车的实际位 置之间行驶所需的时间值、和针对与该行驶车对应的行驶路线候选计算出的时间值相加。 由此,能够修正作为模拟移位处理的对象的行驶车的行驶路线候选的时间值。 在本发明的一个方面的行驶车控制器中,也可以是,在模拟移位处理中,视为行驶 车位于比分岔部靠下游的位置且相对于该分岔部位于行驶车的车长以下的距离范围内。若 作为模拟移位处理的对象的行驶车的模拟位置与实际位置之间较长,则其之间存在其它行 驶车的可能性高。在该情况下,尽管其它行驶车能够先到达目的点,但由于作为模拟移位处 理的对象的行驶车被识别为位于模拟位置,所以存在对作为模拟移位处理的对象的行驶车 分配指令的隐患。关于这点,在本发明的一个方面的行驶车控制器中,视为行驶车相对于分 岔部位于行驶车的车长以下的距离范围内,因此在作为模拟移位处理的对象的行驶车的模 拟位置与实际位置之间不会存在其它行驶车。因此,能够避免虽然本应对该其它行驶车分 配指令但对作为模拟移位处理的对象的行驶车分配指令的情况。 在本发明的一个方面的行驶车控制器中,也可以是,不可切换分岔距离被设定为, 该行驶车的车速越大则不可切换分岔距离越连续性或阶段性地变长。为了在分岔部可靠地 切换行驶车的进路,具有行驶车的车速越大则从分岔部到上游的不可切换分岔距离越长的 趋势。因此,在本发明的一个方面的行驶车控制器中,能够按照该趋势设定不可切换分岔距 离。 本发明的一个方面的行驶车控制器对在包括分岔部的行驶路径上行驶的多个行 驶车中的某一个行驶车分配使其行驶到行驶路径上的目的点的指令,该行驶车控制器具有 指令分配部,该指令分配部基于多个行驶车从各自的位置沿着行驶路径行驶并到达目的点 为止的行驶路线候选,在多个行驶车中检测能够先到达目的点的先到达行驶车,并对先到 达行驶车分配指令,在沿行驶路径朝向分岔部行驶中的行驶车相对于该分岔部位于不可切 换分岔距离的范围内且预定在分岔部向主路径侧行进的情况下,指令分配部在先到达行驶 车的检测中将该行驶车在以该时间点为起点最初通过分岔部时向分岔路侧前进的进路切 换后行驶路线从行驶路线候选中除去。 在本发明的一个方面的行驶车控制器中,在先到达行驶车的检测中,在该行驶车 相对于分岔部位于不可切换分岔距离的范围内的情况下,能够从多个行驶路线候选中除去 进路切换后行驶路线。由此,能够消除被分配了指令的行驶车无法在分岔部切换进路而是 绕行到目的点的情况。能够使行驶车迅速到达目的点。 本发明的一个方面的行驶车系统具备:包括分岔部的行驶路径;沿着行驶路径行 驶的多个行驶车;和上述行驶车控制器。 在该行驶车系统中,由于具备上述行驶车控制器,所以也发挥能够使行驶车迅速 到达目的点的效果。 发明效果 根据本发明的一个方面,能够提供一种能够使空行驶车迅速到达目的点的行驶车 控制器及行驶车系统。 4 CN 111742275 A 说 明 书 3/11 页 附图说明 [图1]图1是表示一个实施方式的行驶车系统的概略图。 [图2]图2是表示一个实施方式的行驶车系统的功能结构的框图。 [图3]图3是用于说明一个实施方式的模拟移位处理的概略图。 [图4]图4是用于说明一个实施方式的模拟移位处理的其它概略图。 [图5]图5是表示一个实施方式的模拟移位处理的流程图。 [图6]图6是表示一个实施方式的反向路线搜索处理的流程图。 [图7]图7(a)是用于说明一个实施方式的反向路线搜索处理的详情的图。图7(b) 是用于说明图7(a)的后续的图。 [图8]图8(a)是用于说明图7(b)的后续的图。图8(b)是用于说明图8(a)的后续的 图。 [图9]图9(a)是用于说明图8(b)的后续的图。图9(b)是用于说明图9(a)的后续的 图。 [图10]图10(a)是用于说明图9(b)的后续的图。图10(b)是用于说明图10(a)的后 续的图。 [图11]图11是用于说明图10(b)的后续的图。 [图12]图12是表示变形例的反向路线搜索处理的流程图。











