
技术摘要:
本发明属于张力架线技术领域,具体涉及一种应用于电力架线过程中的远程实时监控方法。一种应用于电力架线过程中的远程实时监控方法,包括如下步骤:应用管理平台向地面接收站发送控制指令;地面接收站将控制指令转发给无人机装置;无人机装置接收控制指令后,进行对电 全部
背景技术:
张力架线是在我国建设超高压输电线路工程时发展起来的一种架线施工工艺,通 过几十年的不断探索、改进与创新,已积累了丰富的施工经验,施工工艺更加成熟,施工方 法更加简单。架空输电线路导线均釆用一牵多展放方式进行导线张力放线,并采用与张力 放线相配套的工艺进行紧线、挂线、附件安装等作业,整套架线施工方法就称为张力架线。 利用牵引机、张力机及一系列的配套工器具(如走板、放线滑车、牵引绳、导引绳、连接器等) 展放导线、地线,使其在展放过程中离开地面和障碍物呈架空状态的放线方法称为张力放 线。 如图1所示,在张力架线过程中,主牵引机1用于通过牵引绳6将导线布设到塔杆; 牵引线收线滑车2用于回收牵引绳6;张力机3用于牵引导线7放线;导线放线滑车4用于在张 力机3的牵引下释放导线7。在放线过程中,导线7在展放中存在发生受压损伤或输电线路的 导地线在展放过程中偶尔会出现导地线滑出滑轮槽而受损的情况。尤其是图1中牵引线与 导线的接口5在过滑轮时,容易出现滑出滑轮槽,导致导线7未布设到预定线槽。因此,在展 放过程中,每一个基铁塔8都需安排专人看护,这些工人必须要爬到塔顶上才能清晰的观察 到导线牵引情况。发现情况立即通过对讲机通知张力机控制人员,停止展放。上述方式存在 如下问题: 1、需要工人爬到塔顶来观察导线牵引情况,在每个塔站需要一名工人,需要大量 施工人员进行看护,架线工作效率低下,人工成本高,工人在攀爬电力塔是存在较高风险; 2、当架线到距离张力机较远的电力塔时,受限于山地等自然环境,看护工人与张 力机操作工人之间的通讯收到影响,出现故障无法及时通知地面接收人员。
技术实现要素:
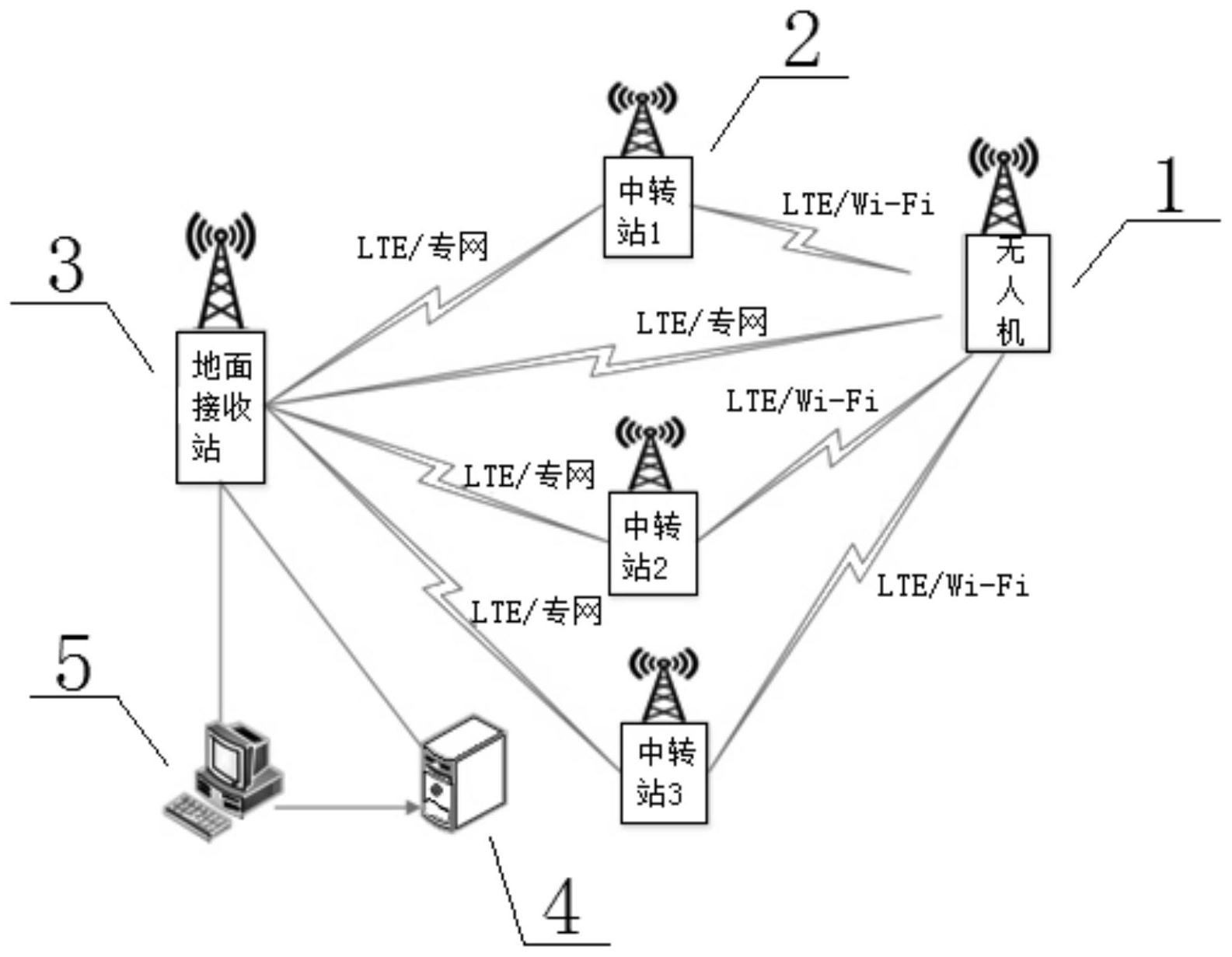
本发明针对在电力架线过程中,需要大量施工人员进行人工看护,容易出现通讯 问题,影响工作效率,存在较高风险的技术问题,目的在于提供一种应用于电力架线过程中 的远程实时监控方法。 一种应用于电力架线过程中的远程实时监控方法,包括如下步骤: 应用管理平台向地面接收站发送用于控制无人机装置的控制指令; 所述地面接收站接收到所述控制指令,采用无线的方式转发给所述无人机装置; 所述无人机装置接收所述控制指令后,进行对电力架线过程中的电力线进行拍摄 的巡检任务,将拍摄到的采集数据采用无线的方式发送给数据中转站,所述采集数据包括 图像或视频数据; 所述数据中转站接收所述采集数据,将所述采集数据采用无线的方式转发给所述 5 CN 111585643 A 说 明 书 2/11 页 地面接收站; 所述地面接收站接收所述采集数据后,将所述采集数据存储于存储服务器中; 所述应用管理平台从所述存储服务器中调取所述采集数据,对所述采集数据进行 分析管理。 本发明将数据采集和数据回传分开实现,无人机装置主要完成数据采集,通过数 据中转站将数据回传,从而降低无人机装置的功耗,提高无人机的续航里程,提高数据采集 效率。同时,数据中转站由于不受功耗影响,另外可以实现中继转发,从而提高数据回传的 稳定性和实时性,提高视频、图像等大容量数据的远程无线传输效率。通过本发明的上述设 计后,可以摒弃传统采用施工人员人工看护的方式,采用无人机的巡航轨迹设定、无人机的 远程控制、采集数据的稳定转发等功能。保证了采集数据的稳定回传,实现了电力线设备的 远距离高效巡检。 所述应用管理平台向地面接收站发送用于控制无人机装置的控制指令之前,包 括: 将电力线按照塔杆进行分段,在每个塔杆上部署一个所述数据中转站,通过所述 应用管理平台根据分段后的电力线及地形数据设置无人机装置的巡线航迹,将所述巡线航 迹作为控制指令; 对分段后的多个塔杆进行编号,对所述数据中转站也进行编号,将每段中的所述 数据中转站与所述塔杆一一对应; 为每个所述数据中转站配置独立的IP地址。 所述无人机装置接收所述控制指令后,进行对电力架线过程中的电力线进行拍摄 的巡检任务,包括: 所述无人机装置接收所述控制指令后,所述无人机装置飞临所述控制指令对应的 塔杆,向所述塔杆对应的所述数据中转站发送拍摄请求消息; 所述数据中转站接收到所述拍摄请求消息后,向所述无人机装置发送确认消息, 所述确认消息中包含有所述数据中转站的设备编号及IP地址; 所述无人机装置接收到所述确认消息后,启动拍摄装置,从当前所述塔杆开始根 据巡线航迹沿着电力线路向下一个塔杆飞行拍摄,得到采集数据; 当所述无人机装置飞临下一个塔杆时,进行所述向所述塔杆对应的所述数据中转 站发送拍摄请求消息步骤,在所述无人机装置接收到所述确认消息后,将拍摄到的所述采 集数据进行封装打包,标识时间和设备编号或IP地址侯,将数据包进行暂存,进行所述启动 拍摄装置步骤; 直至所述无人机装置根据巡线航迹的设定依次完成所有塔杆之间电力线路及设 备的拍摄。 所述将拍摄到的采集数据采用无线的方式发送给数据中转站,所述采集数据包括 图像或视频数据,包括: 当所述无人机装置的数据存储将满时,所述无人机装置搜索附近的所述数据中转 站,并前往停靠,所述无人机装置还通过所述地面接收站通知所述应用管理平台; 所述无人机装置停靠到所述数据中转站上的停靠台上后,将暂存的一个或多个数 据包均采用无线的方式发送给所述数据中转站; 6 CN 111585643 A 说 明 书 3/11 页 当所述无人机装置将暂存的一个或多个所述数据包都发送给所述数据中转站后, 通过所述地面接收站与所述应用管理平台建立连接,请求起飞并继续执行巡检任务; 所述应用管理平台接收到所述请求后,重新设定巡线航迹,将所述巡线航迹作为 控制指令通过所述地面接收站发送给所述无人机装置; 所述无人机装置接收所述控制指令后,继续执行巡检任务。 还包括: 当所述无人机装置的电量不足时,所述无人机装置搜索附近的所述数据中转站, 并前往停靠,所述无人机装置还通过所述地面接收站通知所述应用管理平台; 所述无人机装置停靠到所述数据中转站上的停靠台上后,通过无线充电装置为所 述无人机装置充电; 当所述无人机装置的电池充满后,通过所述地面接收站与所述应用管理平台建立 连接,请求起飞并继续执行巡检任务; 所述应用管理平台接收到所述请求后,重新设定巡线航迹,将所述巡线航迹作为 控制指令通过所述地面接收站发送给所述无人机装置; 所述无人机装置接收所述控制指令后,继续执行巡检任务。 还包括: 当所述无人机装置的数据存储将满或电量不足时,所述无人机装置搜索附近的所 述数据中转站,并前往停靠,所述无人机装置还通过所述地面接收站通知所述应用管理平 台; 所述无人机装置停靠到所述数据中转站上的停靠台上后,通过无线充电装置为无 人机装置充电,将暂存的一个或多个数据包均采用无线的方式发送给所述数据中转站; 当所述无人机装置将暂存的一个或多个所述数据包都发送给所述数据中转站,且 电池充满后,通过所述地面接收站与所述应用管理平台建立连接,请求起飞并继续执行巡 检任务; 所述应用管理平台接收到所述请求后,重新设定巡线航迹,将所述巡线航迹作为 控制指令通过所述地面接收站发送给所述无人机装置; 所述无人机装置接收所述控制指令后,继续执行巡检任务。 所述数据中转站接收所述采集数据,将所述采集数据采用无线的方式转发给所述 地面接收站,包括: 所述数据中转站接收一个或多个所述数据包,向所述地面接收站发送数据传输请 求消息; 所述地面接收站接收到所述请求消息后,向所述数据中转站回复反馈消息,所述 反馈消息包含所述地面接收站当前的状态、待接收数据量及信号强度,所述状态包括空闲 状态或工作状态; 所述数据中转站接收所述反馈消息,若所述反馈消息中的状态为空闲状态且信号 强度大于信号阈值,则与所述地面接收站建立数据连接,将一个或多个所述数据包通过无 线的方式传送给所述地面接收站; 若所述反馈消息中的状态为工作状态且所述待接收数据量大于数量阈值,或所述 信号强度不大于所述信号阈值时,则所述数据中转站请求与前一数据中转站建立数据连 7 CN 111585643 A 说 明 书 4/11 页 接,将一个或多个数据包转发给前一个数据中转站; 前一个数据中转站接收到一个或多个所述数据包后,进行向所述地面接收站发送 数据传输请求消息步骤; 若一个或多个所述数据包转发送至第一个数据中转站,第一个所述数据中转站也 进行向所述地面接收站发送数据传输请求消息步骤,若所述反馈消息中的状态为工作状态 且所述待接收数据量大于数量阈值,或所述信号强度不大于所述信号阈值时,则随机等待 一段时间后再次进行向所述地面接收站发送数据传输请求消息步骤,直至将一个或多个所 述数据包发送给所述地面接收站。 所述地面接收站接收所述采集数据后,将所述采集数据存储于存储服务器中,包 括: 所述地面接收站接收一个或多个所述数据包,根据所述数据包对应的时间和设备 编号或IP地址,对一个或多个所述数据包进行数据汇总,将数据汇总后的数据包按时间的 先后顺序存储于所述存储服务器中。 所述应用管理平台从所述存储服务器中调取所述采集数据,对所述采集数据进行 分析管理,包括: 所述应用管理平台对采集到的所述采集数据进行分析,通过标识的所述时间和设 备编号或IP地址,确定电力线和设备以及日期,当发现电力线故障或电力线状态存在风险 时,将日期、设备编号或IP地址对应的电力线或设备一起通知给运维人员。 本法的方法采用监控系统实现上述步骤,所述监控系统包括一个或多个电力线搭 杆,还包括数据采集装置、数据中转站、地面接收站、应用管理平台和存储服务器,每个所述 电力线塔杆上均设有一个所述数据中转站,所述数据采集装置采用无人机装置; 所述数据采集装置采用无线的方式分别连接每个所述数据中转站,所述数据采集 装置采用无线的方式连接所述地面接收站; 每个所述数据中转站采用无线的方式分别连接所述地面接收站; 所述地面接收站采用有线的方式分别连接所述应用管理平台和所述存储服务器。 所述无人机装置包括计算处理模块,与所述计算处理模块连接的飞行控制模块、 机载视频及图像传感采集设备、无线通信模块、数据存储模块、电池组和电源管理模块。其 中,飞行控制模块用于控制无人机装置的飞行姿态;机载视频及图像传感采集设备用于飞 行过程中对电力线进行高速拍摄,并将电力线的图像或视频数据通过数据存储模块暂时存 储;无线通信模块用于将存储的采集数据通过数据中转站发送到存储服务器,同时用于接 收应用管理平台发送的控制指令;电池组及电源管理模块用于对接数据中转站上无人机停 靠平台的供电装置,给无人机无线充电,在无人机电量不足时,及时搜索附近数据中转站并 停靠充电。 所述机载视频及图像传感采集设备包括前端摄像头和后端摄像头。 所述数据中转站上设置有无人机停靠平台,所述无人机停靠平台包括停靠板和无 线充电装置; 所述数据中转站还包括计算处理模块,与所述计算处理模块连接的数据收发及存 储模块、无线通信模块、电源管理模块、电池组、电力接口模块,所述电力接口模块与所述数 据中转站对应的所述电力线搭杆的电源端连接。其中,数据收发及存储模块,用于在无人机 8 CN 111585643 A 说 明 书 5/11 页 装置停靠在数据中转站时接收无人机装置采集的数据并转发给地面接收站;无线通信模块 负责具体通信的连接;无人机停靠平台用于为无人机装置提供临时停靠,为无人机装置提 供无线充电等功能。设备与塔杆的电力接口模块,实现从电力线上取电,进而为无人机装置 提供无线充电。 所述地面接收站包括计算处理模块,与所述计算处理模块连接的CPE通信模块、数 据汇聚模块、无线通信模块、数据转发模块和电源管理模块。地面接收站用于接收数据中转 站发送来的数据,并通过有线方式存储于存储服务器中,地面接收站接收应用管理平台发 送的用于控制无人机装置的控制指令,并转发给无人机装置。地面接收站通过CPE通信模块 实现LTE/专网等远距离无线通信与Internet有线通信之间的转换。 优选的,所述数据采集装置采用LTE/Wi-Fi分别连接每个所述数据中转站,所述数 据采集装置采用LTE/专网连接所述地面接收站。 优选的,每个所述数据中转站采用LTE/专网分别连接所述地面接收站。 本发明的积极进步效果在于:本发明的一种应用于电力架线过程中的远程实时监 控方法,无需施工人员进行人工爬杆及看护,采用无人机装置采集数据,采用数据中继转发 的形式获取数据,降低了人工工作风险的同时,大大提高了工作效率。 附图说明 图1为现有技术中张力架线的一种过程原理图; 图2为本发明监控方法所采用的的监控系统的一种架构图; 图3为本发明无人机装置的一种系统框图; 图4为本发明数据中转站的一种系统框图; 图5为本发明地面接收站的一种系统框图。











