
技术摘要:
本发明公开了一种机器人离线程序的添加方法、系统、装置及存储介质,该添加方法包括步骤:获取模板文件,所述模板文件内容包括程序类型、轨迹点的查找方式、轨迹点标识及程序指令;解析所述模板文件,并保存解析后的模板文件以及生成对应的交互界面;通过所述交互界面 全部
背景技术:
机器人离线程序是智能制造的重要组成部分,作为虚拟仿真的核心工作内容之 一,也是交付物。机器人作为工业制造必不可少的设备,数量庞大;机器人根据工作性质来 分,有焊接、涂胶、修磨等不同工种,工种不同程序也不相同,相同工种则有很多可复用的部 分相同程序。 目前机器人原程序主要有两种产生方式:1、实体机器人通过示教生成初始程序, 再反向导回相关软件内进行编辑、修改及测试后生成最终程序;2、在Tecnomatix软件内手 动写入,大部分程序都存储在对应的轨迹点,编辑时需要依次打开轨迹点的指令编辑器,再 选择对应的指令格式进行非纯文本写入。以上两种方式的工作量都十分巨大、周期长且容 易出错,很多可复用的程序没有得到有效复用或者复用效果不理想,不利于团队合作。
技术实现要素:
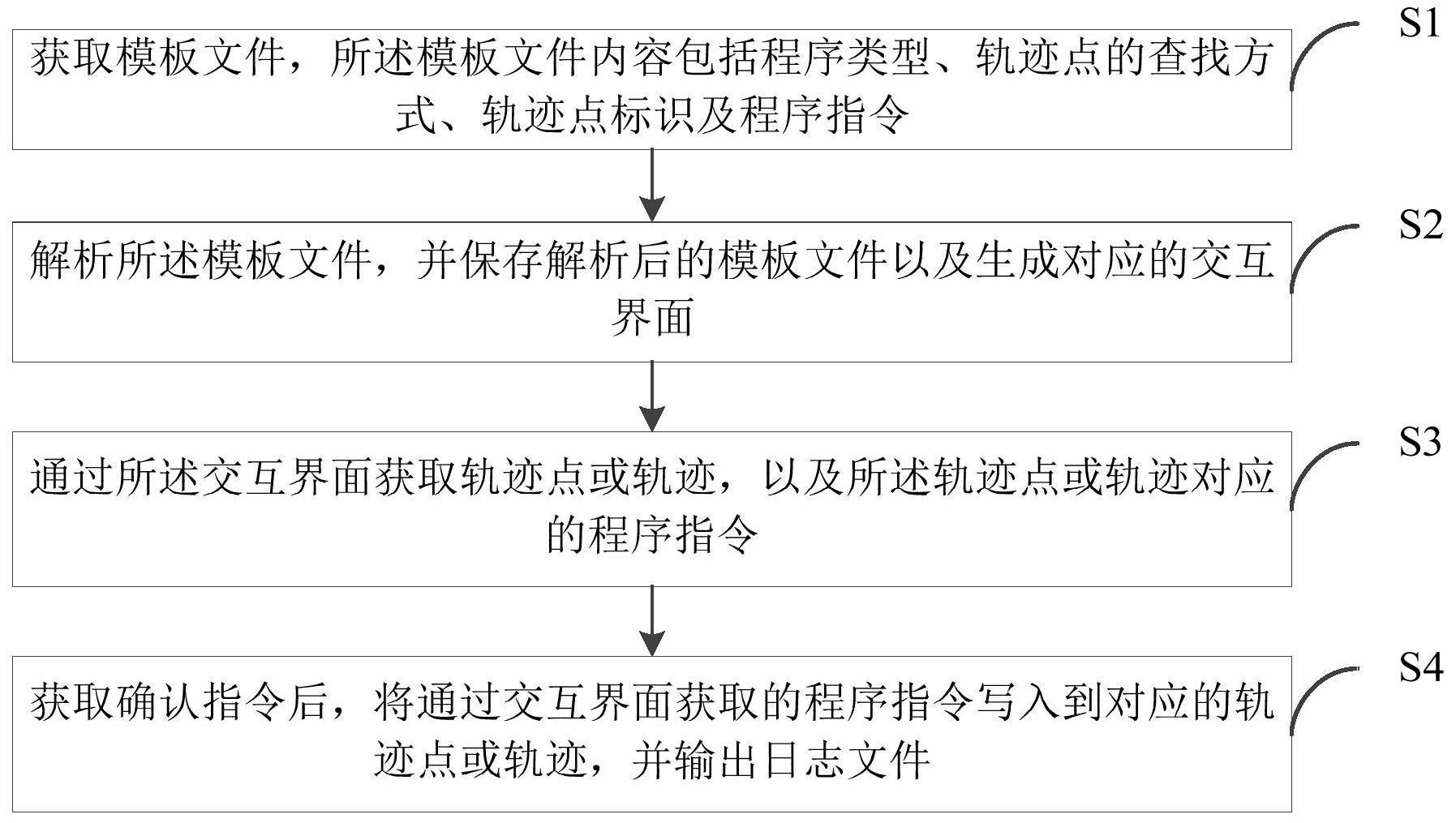
有鉴于此,本发明实施例的目的是提供一种机器人离线程序的添加方法、系统、装 置及存储介质。该发明可以简化机器人程序指令的写入方法,提高程序指令的复用率及写 入效率,有利于团体合作共享。 第一方面,本发明实施例提供了一种机器人离线程序的添加方法,包括以下步骤: 获取模板文件,所述模板文件内容包括程序类型、轨迹点的查找方式、轨迹点标识 及程序指令; 解析所述模板文件,并保存解析后的模板文件以及生成对应的交互界面; 通过所述交互界面获取轨迹点或轨迹,以及所述轨迹点或轨迹对应的程序指令; 获取确认指令后,将通过交互界面获取的程序指令写入到对应的轨迹点或轨迹, 并输出日志文件。 可选地,当所述程序类型支持修改指令,则所述通过所述交互界面获取轨迹点或 轨迹,以及所述轨迹点或轨迹对应的程序指令之后,还包括步骤: 获取所述轨迹点或轨迹对应的程序指令的修改指令,并将修改后的程序指令作为 所述轨迹点或轨迹对应的程序指令。 可选地,所述解析所述模板文件,包括步骤: 判断所述模板文件是否存在子页; 当存在子页,则判断所述子页的表头是否符合格式要求; 当所述子页的表头符合格式要求,则获取所述子页的内容并以模块化数据结构存 储。 可选地,所述获取所述子页的内容包括步骤: 4 CN 111610969 A 说 明 书 2/7 页 记录所述子页的程序类型,并判断所述程序类型是否正确; 当所述程序类型正确,则获取轨迹点的查找方式,并判断所述轨迹点的查找方式 是否正确; 当所述轨迹点的查找方式正确,则获取轨迹点标识,并判断所述轨迹点标识是否 符合要求; 当所述轨迹点标识符合要求,则获取程序指令并以模块化方式保存。 可选地,所述模块的内容包括轨迹点的查找方式、轨迹点标识及程序指令。 可选地,所述交互界面包括加载按钮、确定按钮、清除按钮及重置按钮。 可选地,所述模板文件包括Excel表格文件。 第二方面,本发明实施例提供了机器人离线程序的添加系统,包括: 第一获取模块,用于获取模板文件,所述模板文件内容包括程序类型、轨迹点的查 找方式、轨迹点标识及程序指令; 解析模块,用于解析所述模板文件,并保存解析后的模板文件以及生成对应的交 互界面; 第二获取模块,用于通过所述交互界面获取轨迹点或轨迹,以及所述轨迹点或轨 迹对应的程序指令; 生成模块,用于获取确认指令后,将通过交互界面获取的程序指令写入到对应的 轨迹点或轨迹,并输出日志文件。 第三方面,本发明实施例提供了机器人离线程序的添加装置,包括: 至少一个处理器; 至少一个存储器,用于存储至少一个程序; 当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现 如上述的机器人离线程序的添加方法。 第四方面,本发明实施例提供了一种存储介质,其中存储有处理器可执行的指令, 所述处理器可执行的指令在由处理器执行时用于执行上述的机器人离线程序的添加方法。 实施本发明实施例包括以下有益效果:该发明实施例通过模板文件将机器人离线 程序导入到软件中,避免手动输入程序指令导致的效率低和容易出错的问题;通过解析模 板文件并生成对应的交互界面,将离线程序相关文件展现给用户可见;通过交互界面获取 轨迹或轨迹点及其对应程序,用户在界面操作步骤相对简单;同时,模板文件可包含多个机 器人离线程序,即不同机器人可共用一个模板文件,从而提高模板文件中程序指令的复用 率;上述整个离线程序添加过程简化了机器人程序指令的写入方法,提高了程序指令的复 用率及写入效率,有利于团体合作共享。 附图说明 图1是本发明实施例提供的一种机器人离线程序添加方法的步骤流程示意图; 图2是本发明实施例提供的一种解析模板文件的流程示意图; 图3是本发明实施例提供的一种获取子页内容的流程示意图; 图4是本发明实施例提供的一种修改指令的流程示意图; 图5是本发明实施例提供的一种参考点查找方法的流程示意图; 5 CN 111610969 A 说 明 书 3/7 页 图6是本发明实施例提供的一种机器人离线程序的添加系统的结构框图; 图7是本发明实施例提供的一种机器人离线程序的添加装置的结构框图。











