
技术摘要:
本发明公开了一种面向工业生产过程的弹簧阻尼系统滤波故障诊断方法,属于弹簧阻尼系统故障诊断技术领域。所述方法通过弹簧阻尼系统故障指示信号的数值,确定系统的故障状态,在检测出系统发生故障时,根据测试集合及其椭球确定弹簧阻尼系统的参数向量θ的具体故障分量 全部
背景技术:
弹簧阻尼系统是工业生产过程涉及的机械振动系统当中普遍使用的一类结构,在 工业生产过程中主要起到吸收和耗散生产过程能量的作用,其吸收和耗散能量的大小,关 系到生产过程的安全稳定,所以其系统的安全性将会对整个系统的稳定运行产生重大的影 响。一旦弹簧阻尼系统发生故障而未被及时诊断,那么将会影响整个系统的运行。因此,对 弹簧阻尼系统进行故障诊断的研究对工业生产过程有着重要的现实意义。 常见的故障诊断方法主要分为基于模型的故障诊断方法和基于数据的故障诊断 方法两大类。其中基于数据的故障诊断方法需以大量的数据分析为前提,很难做到实时故 障诊断。基于模型的故障诊断方法以系统解析模型为基础,能够实现实时在线的故障诊断; 但是一般的基于模型的故障诊断方法中要求系统噪声符合一定概率分布,然而实际应用 中,弹簧阻尼系统常受各种外部因素的影响,噪声干扰因素不确定,导致其无法满足这一要 求。 集员滤波方法只要求系统噪声有界,对噪声的概率分布没有限定,因此基于集员 估计的故障诊断方法能够有效处理噪声不确定系统的故障诊断问题。集员估计方法中是基 于可行集的状态来确定系统的故障状态。若检测到可行集为空,则认为系统存在故障;若系 统可行集不为空,则认为系统没有故障。集员估计方法中根据近似可行集的空间形状和包 围方法的不同,可将其划分为椭球体、全对称多胞体、正多胞体等等。 现有的基于集员滤波理论的故障诊断方法中,在检测出系统发生故障后,若要通 过重置参数集合的方法来进一步识别故障,一般是在对参数集合进行全域扩展下进行的, 然而全域扩展下的参数集合在参数向量的各个维度都需要再次进行收缩,所以存在着收敛 速度慢、故障识别时间长,实时性较差的问题。
技术实现要素:
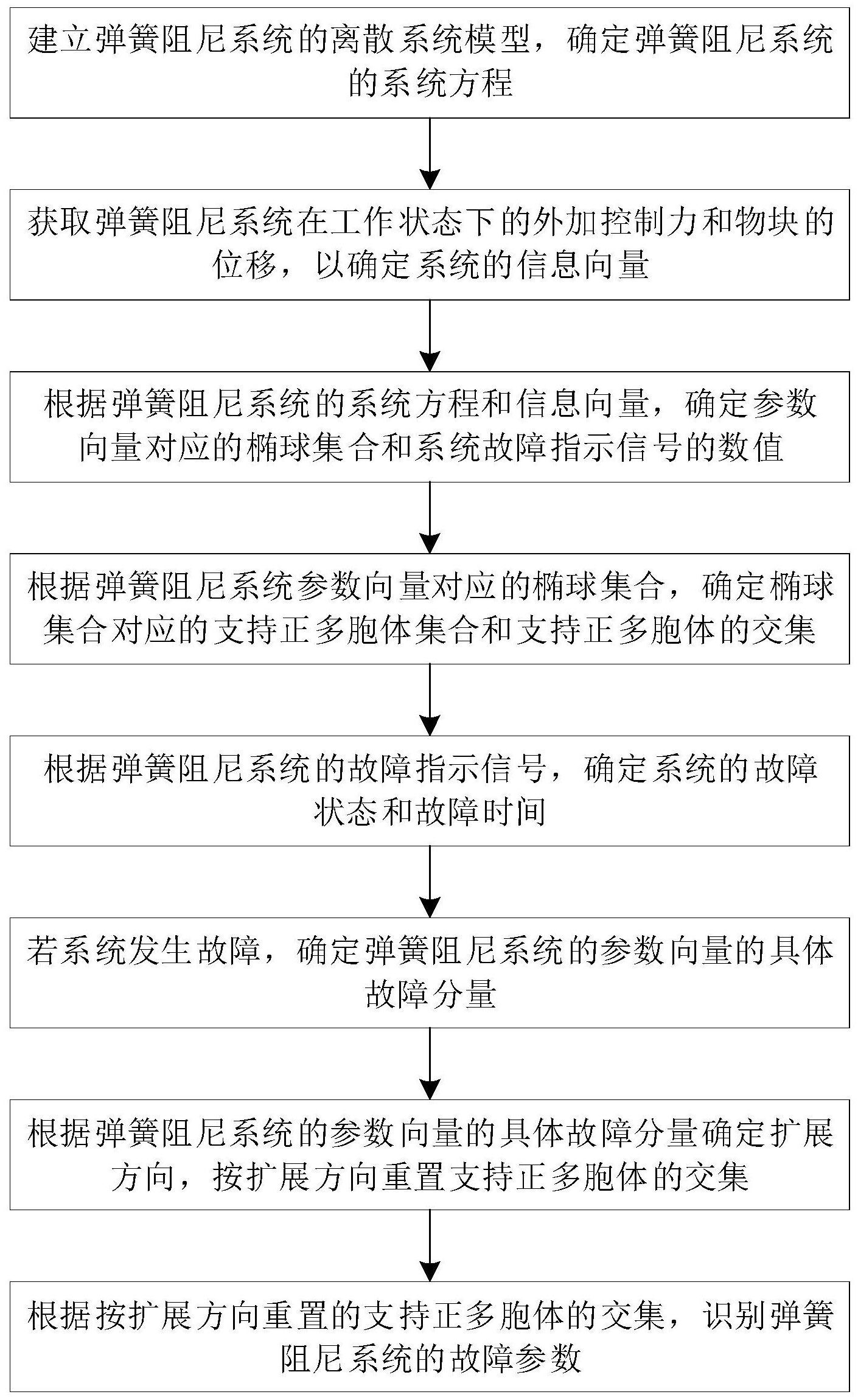
为了解决目前存在的问题,本发明提供了一种面向工业生产过程的弹簧阻尼系统 滤波故障诊断方法,所述方法包括: 根据弹簧阻尼系统的系统方程和信息向量确定弹簧阻尼系统的参数向量对应的 椭球集合,进而确定椭球集合对应的支持正多胞体集合和支持正多胞体的交集; 在系统发生故障时,根据测试集合及其 -John椭球确定弹簧阻尼系统的参 数向量的具体故障分量继而根据弹簧阻尼系统的参数向量的具体故障分量确定扩展方向, 按扩展方向重置支持正多胞体的交集; 根据按扩展方向重置的支持正多胞体的交集,识别弹簧阻尼系统的参数向量中的 故障参数。 7 CN 111597647 A 说 明 书 2/15 页 可选的,所述方法包括: 步骤101,建立弹簧阻尼系统的离散系统模型,确定弹簧阻尼系统的系统方程; y(k)=θTφ(k) e(k) 其中,y(k)为k时刻系统的输出,θ=[θ1,θ2,θ3,θ]T4 为参数向量,k表示离散时间,φ (k)为信息向量,e(k)为弹簧阻尼系统的不确定噪声,且e(k)有界,即|e(k)|≤γ,γ为大于 零的常数; 步骤102,获取弹簧阻尼系统在工作状态下的外加控制力和对应的物块的位移,以 确定系统的信息向量φ(k); 步骤103,根据步骤101确定的弹簧阻尼系统的系统方程和步骤102确定的信息向 量φ(k),确定参数向量θ对应的椭球集合和系统故障指示信号f(k)的数值; 步骤104,根据步骤103确定的弹簧阻尼系统参数向量θ对应的椭球集合,确定椭球 集合对应的支持正多胞体集合O(k)和支持正多胞体的交集; 步骤105,根据步骤103确定的弹簧阻尼系统的故障指示信号f(k),确定系统的故 障状态和故障时间; 步骤106,若系统发生故障,确定弹簧阻尼系统的参数向量θ的具体故障分量; 步骤107,根据步骤106确定的弹簧阻尼系统的参数向量的具体故障分量确定扩展 方向,按扩展方向重置支持正多胞体的交集; 步骤108,根据步骤107中按扩展方向重置的支持正多胞体的交集,识别弹簧阻尼 系统的故障参数。 可选的,所述步骤104,根据步骤103确定的弹簧阻尼系统参数向量θ对应的椭球集 合,确定椭球集合对应的支持正多胞体集合O(k)和支持正多胞体的交集,包括: 其中, 表示k时刻支持正多胞体集合O(k)的参数的上界, 表示k时刻支 持正多胞体集合O(k)的参数的下界, <·>为内积函数,n为参数向量θ的维数,k时刻表示第k个离散时刻; 根据支持正多胞体集合O(k),确定k时刻支持正多胞体的交集: X(k)=O(1)∩…∩O(k)=X(k-1)∩O(k) 即 8 CN 111597647 A 说 明 书 3/15 页 其中, 表示k时刻支持正多胞体的交集X(k)的参数的上界, 表示k时刻 支持正多胞体的交集X(k)的参数的下界。 可选的,所述步骤106,若系统发生故障,确定弹簧阻尼系统的参数向量θ的具体故 障分量,包括: 对k-1时刻支持正多胞体的交集X(k-1)进行n-1维扩展,获得测试集合 即对于第i个测试集合 除掉第i维,都进行扩展; 根据所述k-1时刻的测试集合 计算k-1时刻测试集合对应的 - John椭球 利用弹簧阻尼系统的系统方程和信息向量,更新k-1时刻的 -John椭球 得到k时刻的 John椭球 计算所述k L时刻 -John椭球 空集指示信号 根据所述k L时刻 -John椭球 空集指示信号 确定弹簧阻 尼系统的参数向量θ的具体故障分量。 可选的,所述步骤107,根据步骤106确定的弹簧阻尼系统的参数向量的具体故障 分量确定扩展方向,按扩展方向重置支持正多胞体的交集,包括: 若弹簧阻尼系统的参数向量θ中的θi发生故障,按下式更新k-1时刻重置的支持正 多胞体的交集Xr(k-1)的第i维参数的上界: 若弹簧阻尼系统的参数向量θ中的θi发生故障,按下式更新k-1时刻重置的支持正 多胞体的交集Xr(k-1)的第i维参数的下界: 若弹簧阻尼系统的参数向量θ中的θi未发生故障,按下式更新k-1时刻重置的支持 正多胞体的交集Xr(k-1)的第i维参数的上界: 若弹簧阻尼系统的参数向量θ中的θi未发生故障,按下式更新k-1时刻重置的支持 正多胞体的交集Xr(k-1)的第i维参数的下界: 根据所述k-1时刻支持正多胞体的交集Xr(k-1)每维参数的上界和下界,按下式获 得k-1时刻按扩展方向重置的支持正多胞体的交集Xr(k-1): 9 CN 111597647 A 说 明 书 4/15 页 其中, 为第i维参数θi的最大变化范围,i∈{1,…,n},r为上标,带有此上标的 参数和集合表示重置后的参数和集合。 可选的,所述根据步骤107中按扩展方向重置的支持正多胞体的交集,识别弹簧阻 尼系统的故障参数,包括: 根据所述k-1时刻按扩展方向重置的支持正多胞体的交集Xr(k-1),计算k-1时刻 按扩展方向重置的支持正多胞体的交集Xr(k-1)对应的 -John椭球Er(k-1); 利用k时刻物块的位移y(k)、信息向量φ(k),k-1时刻的 -John椭球Er(k-1) 的中心θcr(k-1)、轴信息矩阵Pr(k-1)和系统不确定噪声的边界γ,重新更新k时刻弹簧阻尼 系统参数向量对应的椭球集合E(k)的中心θc(k)和轴信息矩阵P(k); 根据所述重新更新的椭球集合E(k),重新更新k时刻椭球集合E(k)对应的支持正 多胞体集合O(k)和支持正多胞体的交集X(k); 根据所述支持正多胞体的交集X(k)每一维的上界和下界,确定弹簧阻尼系统的故 障参数向量 其中 为k时刻支持正多胞体的交集X (k)的第i维对应的参数的上界, 为k时刻支持正多胞体的交集X(k)的第i维对应的参 数的下界。 可选的,所述步骤103,根据步骤101确定的弹簧阻尼系统的系统方程和步骤102确 定的信息向量φ(k),确定参数向量θ对应的椭球集合和系统故障指示信号f(k)的数值,包 括: 按下面两式确定k时刻仿射变换后 正交的两个平行超平面的 坐标,即α (k)和 其中 为仿射变换后的φ: 若α(k)≥1或 则故障指示信号f(k)=1,表明弹簧阻尼系统在k时刻发 生故障; θc(k)=θc(k-1), P(k)=P(k-1); 10 CN 111597647 A 说 明 书 5/15 页 若α(k)≤1且 则故障指示信号f(k)=0,表明弹簧阻尼系统在k时刻未发 生故障。 可选的,若 按下面两式更新k时刻椭球集合E(k)的中心θc(k)和轴 信息矩阵P(k): θc(k)=θc(k-1), P(k)=P(k-1); 若两者还同时满足 则 在上述条件下,若|μ(k)|>ρ,则 在上述条件下,若|μ(k)|≤ρ,则 τ(k)=0, σ(k)=nα2, 之后按下面两式更新k时刻椭球集合E(k)的中心θc(k)和轴信息矩阵P(k) 其中n为参数向量θ的维数,μ(k)为α(k)和 的平均值,ρ为大于零的数,设定ρ =10-6,τ(k)为k时刻仿射变换后 沿 的中心坐标,σ(k)为 沿 半轴的平方,δ 11 CN 111597647 A 说 明 书 6/15 页 (k)为 正交于 的半轴的平方,ε(k)、b(k)、α为中间变量, 为仿射变换后的E, 为 仿射变换后的φ。 可选的,所述步骤102,获取弹簧阻尼系统在工作状态下的外加控制力和对应的物 块的位移,以确定系统的信息向量φ(k),包括: 在预定时间范围内,获取弹簧阻尼系统在工作状态下的外加控制力和对应的物块 的位移; 将所得的外加控制力和对应的物块的位移的数据代入下式中: φ(k)=[-y(k-1) ,-y(k-2) ,u(k-1) ,u(k-2)]T 确定出弹簧阻尼系统的信息向量φ(k);k的取值范围为1至N,k为整数。 本申请的另一个方面还提供一种弹簧阻尼系统滤波故障诊断系统,所述系统采用 上述面向工业生产过程的弹簧阻尼系统滤波故障诊断方法对弹簧阻尼系统进行故障诊断。 本发明有益效果是: 本申请通过弹簧阻尼系统故障指示信号的数值,确定系统的故障状态,在检测出 系统发生故障时,根据测试集合及其 -John椭球确定弹簧阻尼系统的参数向量θ的具 体故障分量,继而根据具体故障分量得到扩展方向,按扩展方向重置支持正多胞体的交集, 相对于现有故障检测方法中的全域扩展,本申请所提出的面向工业生产过程的弹簧阻尼系 统滤波故障诊断方法收敛速度更快、可以更快的识别出故障参数、从而实时性能更好。 附图说明 为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使 用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于 本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他 的附图。 图1是本发明一个实施例中公开的一种面向工业生产过程的弹簧阻尼系统滤波故 障诊断方法流程图。 图2是一种弹簧系统结构图。 图3是本发明一个实施例中公开的两种算法下的一种弹簧系统的参数分量θ1的上 下界变化曲线图。 图4是本发明一个实施例中公开的两种算法下的一种弹簧系统的参数分量θ2的上 下界变化曲线图。 图5是本发明一个实施例中公开的两种算法下的一种弹簧系统的参数分量θ3的上 下界变化曲线图。 图6是本发明一个实施例中公开的两种算法下的一种弹簧系统的参数分量θ4的上 下界变化曲线图。











