
技术摘要:
一种方法包括确定多相电机是否不稳定。该方法还包括响应于确定多相电机不稳定而将第一三端半导体开关的栅极电压设置为零。该方法还包括响应于确定多相电机稳定而将第一三端半导体开关的栅极电压设置为非零。该方法还包括响应于第一三端半导体开关被设置为零而增大从多 全部
背景技术:
可以通过电致动车轮来操纵车辆。电致动车轮的定向可以通过电机或马达来指 引。由于功率损耗或其他情况,电机可能变得不受控制或不稳定,使得车轮定向摆动。 因此,期望减轻这种摆动并降低不稳定性。
技术实现要素:
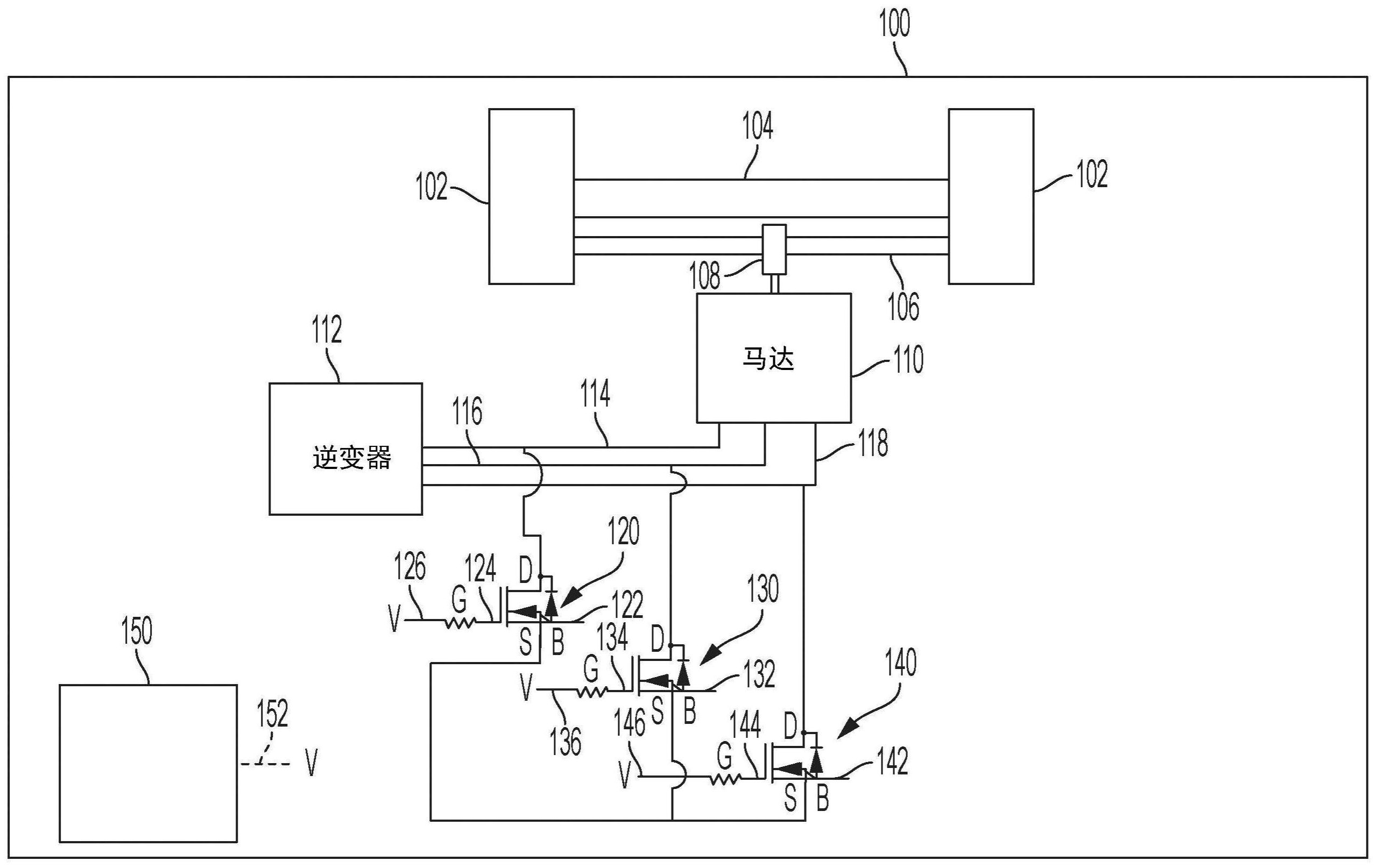
公开的实施例的一方面包括一种车辆,该车辆包括多相电机,其被配置为对与车 辆的后轴相关联的车轮进行定向。车辆还包括第一三端半导体开关,其被配置为:当半导体 开关的栅极电压为零时,增大从多相电机的一个相到多相电机的另一个相的电导 (electrical conduction)。第一三端半导体开关被配置为:当半导体开关的栅极电压非零 时,增大从多相电机的一个相到多相电机的其他相的电阻(electrical resistance)。 公开的实施例的另一方面包括一种用于车辆的系统。该系统包括多相电机,其被 配置为对与车辆的后轴相关联的车轮进行定向。该系统还包括第一三端半导体开关,其被 配置为响应于第一三端半导体开关的栅极电压为零而增大从多相电机的一个相到多相电 机的另一个相的电导。第一三端半导体开关被配置为响应于第一三端半导体开关的栅极电 压非零而增大从多相电机的一个相到多相电机的其他相的电阻。 公开的实施例的另一方面包括一种用于车辆的系统。该系统包括多相电机和控制 器。该多相电机被配置为对与车辆的后轴相关联的车轮进行定向。该控制器被配置为:确定 多相电机是否不稳定;响应于确定多相电机不稳定而将第一三端半导体开关的栅极电压设 置为零;以及响应于确定多相电机稳定而将第一三端半导体开关的栅极电压设置为非零。 公开的实施例的另一方面包括方法。该方法包括确定多相电机是否不稳定,该多 相电机被配置为对与车辆的后轴相关联的车轮进行定向。该方法还包括响应于确定多相电 机不稳定而将第一三端半导体开关的栅极电压设置为零。该方法还包括响应于确定多相电 机稳定而将第一三端半导体开关的栅极电压设置为非零。该方法还包括响应于第一三端半 导体开关被设置为零而增大从多相电机的一个相到多相电机的另一个相的电导。该方法包 括响应于第一三端半导体开关被设置为非零而增大从多相电机的一个相到多相电机的另 一个相的电阻。 4 CN 111546901 A 说 明 书 2/8 页 附图说明 在说明书结尾处的权利要求中特别指出并清楚地声明了被视为本发明的主题。通 过以下结合附图的详细描述,本发明的前述和其他特征及优点将变得显而易见,其中: 图1大体上示出了根据本公开的原理的具有多相电机和N掺杂半导体的车辆,该N 掺杂半导体被配置为使马达的三个相中的每一个选择性地短路; 图2大体上示出了根据本公开的原理的具有多相电机和在少于多相电机的所有相 的相上的对置式(opposed)N掺杂半导体的车辆,所述对置式N掺杂半导体被配置为使马达 的所有相选择性地短路; 图3大体上示出了根据本公开的原理的具有多相电机和P掺杂半导体的车辆,该P 掺杂半导体被配置为使马达的三个相中的每一个选择性地短路;以及 图4是大体上示出了根据本公开的原理的用于抑制不受控制的电机的振荡的方法 的流程图。











