
技术摘要:
本发明提供一种基于北斗和Lora数传电台的车辆管理系统,包括若干车辆、若干车辆子网和企业内部的车辆管理平台,所有车辆均配备有智能车载模块。智能车载模块通过北斗链路和车辆管理平台进行通信,同时能够和距离较近的其他车辆通过Lora数传电台组成车辆子网。当智能车 全部
背景技术:
近些年来,全球对基础设施建设的投资逐步增加,建筑、路桥、水利、能源等行业发 展迅速,与此同时我国相关的工程企业正在扩大规模,并向海外拓展业务,在国内和一些周 边国家经常能看到我国工程企业的车辆。目前老挝、越南、柬埔寨、尼泊尔等周边国家是我 国的主要援助对象,为满足人员和物资跨区域调度的需要,我国企业的工程车辆和公务车 辆等常常到这些国家的公路、铁路、电站等施工现场,这就对车辆的管理提出了更高的要 求。工程企业的车辆往往数量多,机动性大,位置分散,车辆的管理一直是困扰企业的一大 难题。传统的车辆管理由于缺乏对车辆的实时和精确监控,造成车辆运输过程透明度低、信 息反馈不及时;其次由于缺乏统一的车辆管理平台,企业管理人员与车辆司机沟通困难,难 以满足司机和车辆的实时调度,尤其是当车辆在国外的时候。这些问题使企业难以全面掌 握所有车辆的实际情况,增加了车辆管理风险和成本。 随着信息技术的飞速发展,现阶段主要出现了四种类型的车辆管理系统:第一种 采用“GPS/北斗定位 GPRS通信”的方式,第二种采用“GPS/北斗定位 NB-IoT通信”的方式, 第三种采用“GPS/北斗定位 云平台”的方式,第四种采用“北斗定位 北斗通信”的方式。在 这四种车辆管理系统中,车辆的定位均是通过GPS或北斗进行的,均能够达到较高的定位精 度。在车辆的通信方式中,通过GPRS或NB-IoT与企业内部车辆管理平台进行通信的方式速 率较高,覆盖范围广,但要求车辆必须在基站的覆盖范围内才能通信,并且都需要按月或按 年向运营商付费。如果车辆到了国外,一方面施工场地不一定有基站覆盖,导致通信困难, 另一方面国际漫游也会产生较为高昂的费用。采用“云平台”的车辆管理系统则需借助于第 三方企业提供云技术支持,车辆和企业内部的管理平台均需通过互联网接入到“云平台”, 由“云平台”进行信息交互和数据管理,车辆管理平台可以灵活定制车辆监控数据。但这种 车辆管理方式仍然要求车辆位于基站的覆盖范围内,且需要向第三方企业付费,第三方企 业的运营情况也会间接地影响车辆管理系统的使用。对于第四种车辆管理系统而言,北斗 通信方式覆盖范围广,在亚太地区已经实现了可靠的通信,并且不需要借助于基站,购买了 北斗SIM卡之后不需要再支付任何费用。但北斗通信的通信频度较低,民用北斗卡每分钟仅 可发送一次数据,并且发送数据时的瞬时功率较大,当北斗通信单元在连续不间断工作时, 存在发生故障的风险。一旦车辆的北斗通信单元发生故障,则中断了与企业内部联系。 因此如何开发出一种可靠性高、成本低、易用好用的车辆管理系统成为了一个重 要问题。
技术实现要素:
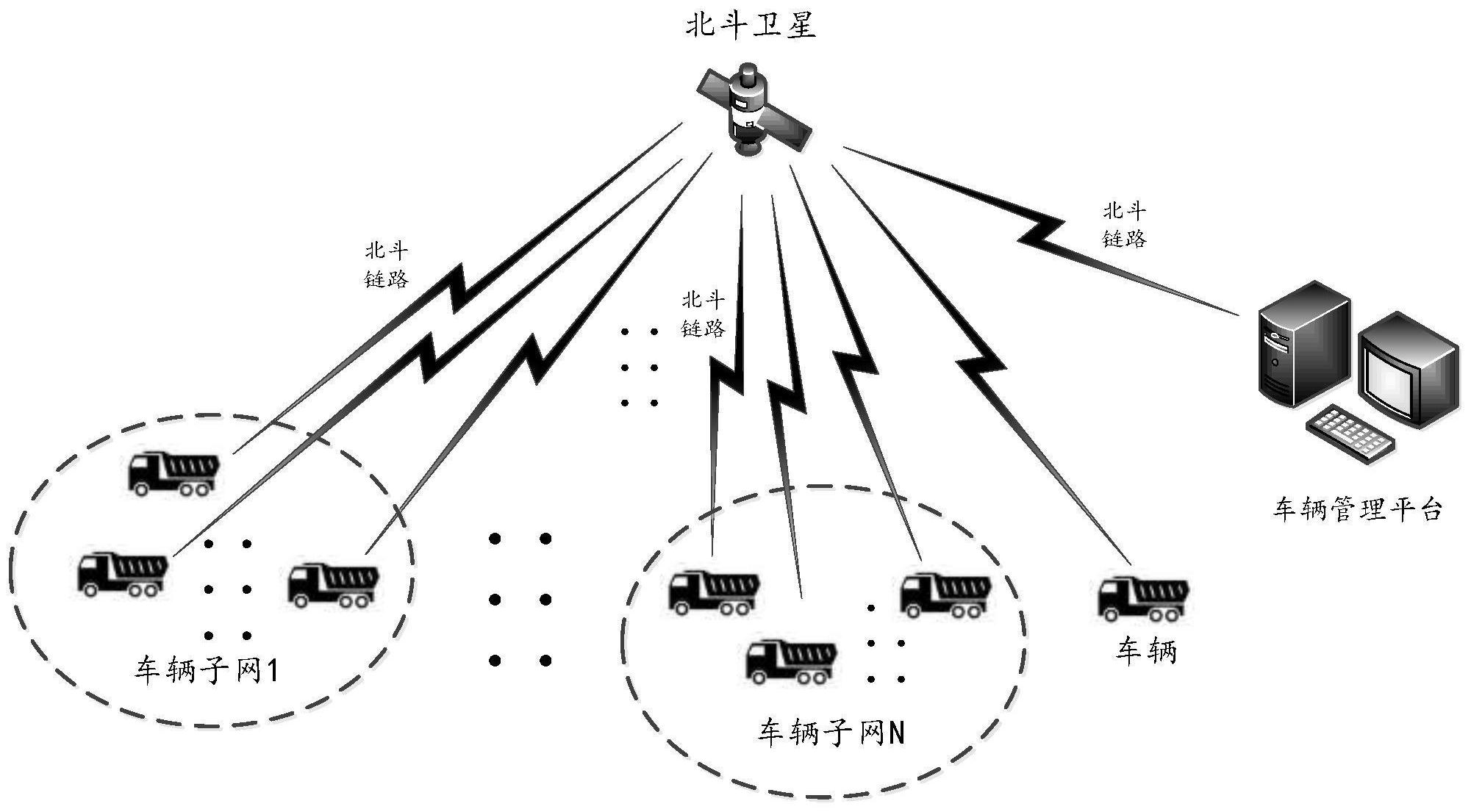
本发明的目的在于解决上述现有技术存在的缺陷,提供一种基于北斗和Lora数传 4 CN 111585636 A 说 明 书 2/10 页 电台的车辆管理系统。在该管理系统下,企业管理人员能够实时与所有车辆进行通信,掌握 车辆的动态,确保车辆信息的透明化,并从一定程度上保障车辆的安全。 一种基于北斗和Lora数传电台的车辆管理系统,包括若干车辆、由若干车辆通过 Lora数传电台构成的若干车辆子网、以及企业内部的车辆管理平台;每个所述车辆子网内 设置有一个中继车辆; 每个车辆均配备有智能车载模块;所述智能车载模块具有北斗通信链路和Lora数 传电台通信链路; 每个车辆通过所述北斗通信链路和车辆管理平台进行通信,同时每个车辆通过所 述Lora数传电台通信链路与车辆子网内的其他车辆进行通信; 当智能车载模块的北斗通信链路发生故障时,能够通过Lora数传电台通信链路和 所述中继车辆建立连接,并经由中继车辆和车辆子网内的其他车辆进行通信、同时经由中 继车辆间接地和车辆管理平台进行通信。 进一步地,如上所述的基于北斗和Lora数传电台的车辆管理系统,所述智能车载 模块包括:STM32主控单元,以及与所述STM32主控单元连接的北斗通信定位单元、Lora数传 电台单元、三轴加速度传感器、蜂鸣报警器、指纹识别单元和紧急开关; 所述北斗通信定位单元集成了通信和定位两个功能,北斗通信功能用于车辆和所 述车辆管理平台进行通信,定位功能用于获取车辆的经纬度、速度和海拔信息; 所述Lora数传电台单元用于和车辆子网内的其他车辆进行通信; 所述三轴加速度传感器用于采集车辆在前向、侧向、竖直向三个方向的加速度信 息,以判断车辆的实时运动状态; 所述蜂鸣报警器用于当车辆管理平台监控的车辆发生异常时,通过发声报警的方 式提醒车辆司机; 所述指纹识别单元用于采集车辆司机身份信息,以通过指纹信息登录车辆管理系 统; 所述紧急开关用于当车辆司机发生紧急情况时,向STM32主控单元发生信息, STM32主控单元通过北斗通信定位单元和Lora数传电台单元和外界取得联系。 进一步地,如上所述的基于北斗和Lora数传电台的车辆管理系统,所述北斗通信 链路中传输的数据帧类型包括:注册命令帧、注册回复帧、车辆基本信息帧、车辆状态信息 帧、查询命令帧、应急通信帧和告警信息帧; 所述注册命令帧由智能车载模块通过北斗发给车辆管理平台,车辆管理平台收到 注册命令帧后将车辆和司机的信息写入车辆管理平台的数据库中; 所述注册回复帧由车辆管理平台通过北斗发送给对应的智能车载模块,以告知车 辆注册成功与否; 所述车辆基本信息帧由车辆管理平台按照一定的周期通过北斗通信链路向所有 车辆的智能车载模块发送,智能车载模块收到后将对应的车辆的基本信息存储在自身的内 存中,车辆基本信息中包含车辆编号和车辆经纬度; 所述车辆状态信息帧由车辆的智能车载模块按照一定周期向车辆管理平台发送, 车辆管理平台收到车辆状态信息帧后进行存储,车辆状态信息帧除了包含车辆基本信息 外,还包括车牌号、车型、智能车载模块的北斗SIM卡号、速度、加速度、海拔、车辆故障状态 5 CN 111585636 A 说 明 书 3/10 页 的信息; 所述查询命令帧由车辆管理平台向被查询车辆发送,被查询车辆收到查询命令帧 后即在下一个北斗发送周期向车辆管理平台发送车辆状态信息帧; 所述应急通信帧由智能车载模块同时发送给车辆子网内的车辆和车辆管理平台; 车辆子网内的其他车辆收到应急通信帧后会再次通过各自的北斗通信定位单元向车辆管 理平台转发该应急通信帧; 所述告警信息帧由车辆管理平台发送给可能会出现险情的车辆,从而驱动智能车 载模块发声报警。 进一步地,如上所述的基于北斗和Lora数传电台的车辆管理系统,所述Lora数传 电台通信链路中传输的数据帧类型包括:组网请求帧、组网状态帧; 所述组网请求帧由需要组网的某车辆向车辆子网内的其他车辆发送; 所述组网状态帧由接收组网请求帧的目标车辆发送给发送方车辆,以告知组网成 功与否。 进一步地,如上所述的基于北斗和Lora数传电台的车辆管理系统,每个智能车载 模块的内存中均存储有两张表以进行维护,该两张表为:车辆基本信息表和车辆子网信息 表; 所述车辆基本信息表是根据车辆管理平台发来的车辆基本信息帧构建并更新的, 车辆基本信息表中的内容包括车辆编号和车辆经纬度; 所述车辆子网信息表是根据本车辆和其他车辆之间的距离构建并更新的,车辆子 网信息表中的内容包括车辆编号、车辆经纬度和北斗信号强度。 进一步地,如上所述的基于北斗和Lora数传电台的车辆管理系统,所述中继车辆 在车辆子网内根据不同时间会发生变化; 智能车载模块实时地对车辆子网信息表中的北斗信号强度从大到小进行排序而 选定,北斗信号强度最大的车辆即为车辆子网中的中继车辆。 进一步地,如上所述的基于北斗和Lora数传电台的车辆管理系统,所述车辆管理 平台设于企业内部,其功能模块包括计算机、运行于计算机上的车辆管理模块、数据库和北 斗指挥机; 所述北斗指挥机通过RS232接口与计算机连接,计算机通过所述北斗指挥机同时 与多个车辆进行通信; 所述车辆管理模块包括用户管理单元、通信管理单元、电子地图单元、车辆状态监 测单元和信息查询单元; 其中用户管理单元用于对车辆管理系统使用者的账号、密码和车辆司机身份信息 进行管理; 通信管理单元用于控制计算机与北斗指挥机之间的数据收发; 电子地图单元用于显示所有车辆在地图中的位置,同时标示危险区域; 车辆状态监测单元用于对收到的车辆状态信息帧进行解析,并实时监视所有车辆 的动态; 信息查询单元用于查询指定车辆的实时信息; 数据库用于存储车辆管理系统使用者的账号信息、司机身份信息、车辆行驶信息。 6 CN 111585636 A 说 明 书 4/10 页 进一步地,如上所述的基于北斗和Lora数传电台的车辆管理系统,所述车辆行驶 信息包括车辆编号、车牌号、车型、行驶路径、速度、海拔、加速度、智能车载模块的北斗通信 SIM卡号和车辆故障状态。 有益效果: 本发明基于STM32的智能车载模块结构简单、成本低、操作方便。利用北斗通信链 路建立起所有车辆和车辆管理平台之间的联系,通信距离远,不需要基站的覆盖,凡位于亚 太地区的车辆均可处在车辆管理系统的监管之下,且无需支付服务费用。当车辆的北斗通 信失效时可由车辆子网内部中继车辆的Lora数传电台进行辅助通信,是一种冗余通信手 段,提高了车辆管理系统的可靠性。 附图说明 图1是本申请车辆管理系统的结构示意图; 图2是智能车载模块的结构示意图; 图3是北斗通信链路中传输的数据的数据帧类型图; 图4是Lora数传电台通信链路中传输的数据帧类型图; 图5是智能车载模块收到北斗数据帧后的处理流程图; 图6是车辆子网拓扑结构图; 图7是智能车载模块收到Lora数传电台数据帧后的处理流程图; 图8是车辆管理模块的功能模块图。











