
技术摘要:
本发明公开了一种异构无人机集群分布式时空协调控制方法,将集群内个体划分为领航者、协调者和跟随者,由不同任务角色产生不同功能形成异构无人机集群,进一步建立了异构集群无人机分布式时空协调控制框架,设计了异构无人机集群的协调机制,并根据角色功能分别设计代 全部
背景技术:
集群往往是指大规模有限智能个体之间通过局部交互实现群体智能涌现的一种 组织形式。其中,“大规模”说明个体数量之庞大;“有限智能个体”一方面强调了个体具有一 定的自主能力从而体现其智能性,另一方面也说明个体只遵循简单的行为规则且单凭个体 能力不足以独立完成复杂任务;“局部交互”说明个体只能获得与之相邻的其他个体和环境 的信息;“群体智能涌现”则是指通过个体之间的相互作用实现整体能力大于个体能力之和 的效果。在自然界中,鸟群、鱼群、蚁群、蜂群等生物群体都可以看作集群,且生物的集群运 动往往能获取最大群体优势。研究者们通过观察和模拟生物集群行为,总结出集群具有可 扩展性好、灵活性高和鲁棒性强等特点。受自然界生物集群的启发,Beni等人在1993年提出 了集群智能(Swarm Intelligence)的概念,并将其作为一种人工智能模式引入到传统的多 个体系统中拓展为大规模集群系统,引起了众多研究者们的关注。 无人机是可进行远程控制或自主控制装置操纵的、具有特定任务导向性的非载人 飞行器,旨在减少飞行员的牺牲并突破有人机的限制去完成更加复杂的任务。近年来,无人 机所执行任务的复杂程度不断增加,应用的领域不断拓展,特别是高度对抗性、高度不确定 性、高度动态性的战场环境和多元化、信息化的作战模式促使无人机系统向着集群化、自主 化和智能化的方向发展。因此,集群无人机通常是由大规模的具有一定自主能力的同构/异 构小型无人机构成,集群中不存在中心控制且个体往往只能进行局部的感知和通信。由于 引入集群智能的自组织机制和分布式架构,将使得具备自主能力的大规模集群无人机能够 在没有集中控制的情况下通过相互信息交互产生整体效应,实现较高程度的自主协作,从 而能在尽量少的人的干预下完成预期任务,体现其“数量提升能力、成本创造优势、整体大 于部分之和”的意义。 集群无人机领域的关键技术包括集群通信组网、协同感知与态势共享、协同任务 分配与决策、集群运动控制等。其中,集群运动控制是直接作用于集群无人机的重要环节, 可进一步分为有定形的编队控制和无定形的群集控制。无人机编队控制旨在使众多无人机 达到期望的约束状态,往往是某种特定的几何形状;而群集控制则侧重于使得集群无人机 保持一种聚集且不相互碰撞的状态,个体之间的相对位置关系没有严格的限制。目前,集群 无人机运动控制的主要方法有:领航跟随法、人工势场法、一致性协议法和基于行为法等。 其中,领航跟随法是在无人机集群中指定一个或多个领航者,其他均为跟随者,群体的运动 通过对领航者状态信息的共享而实现,进而可以通过对领航者的控制实现对整个集群的控 制。传统的领航跟随法往往没有精确的队形反馈,如果领航者出现故障会导致集群的混乱, 鲁棒性有待提高。此外,当需要进行全局通信时与集中式控制相似,计算量较大,不利于群 体的扩展。 5 CN 111580545 A 说 明 书 2/11 页
技术实现要素:
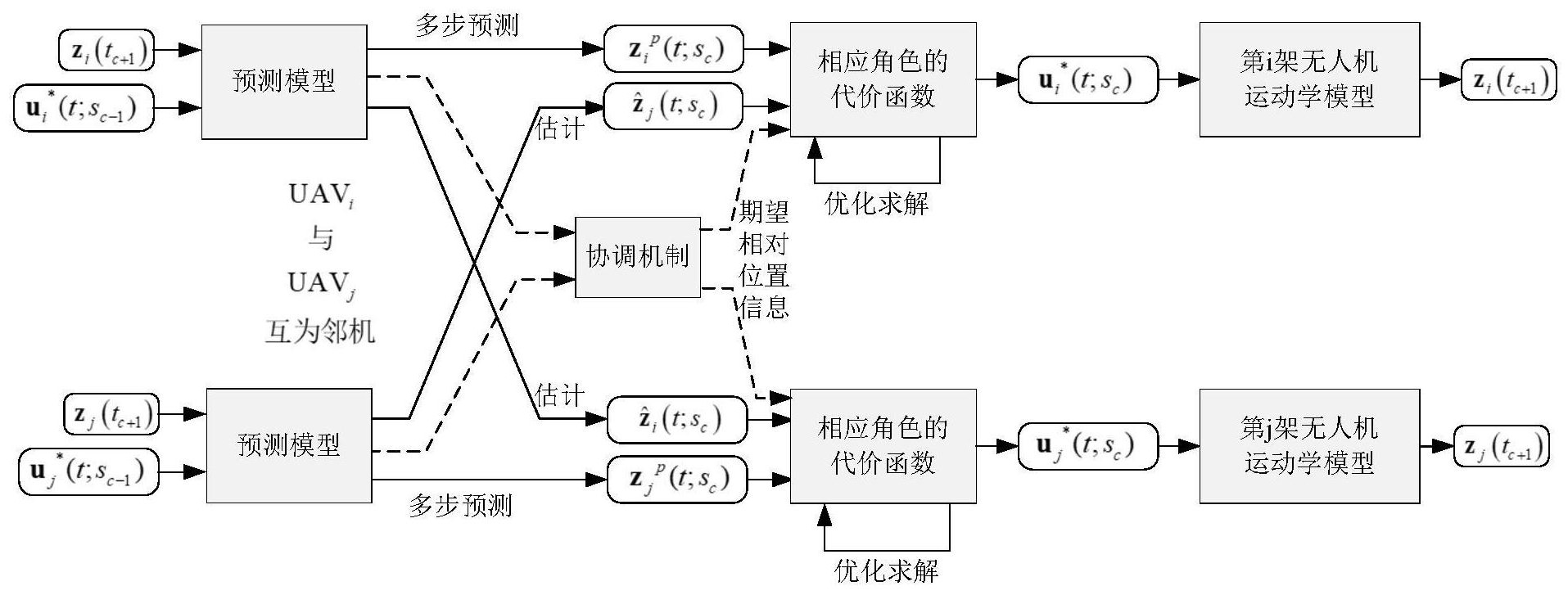
为了解决上述已有技术存在的不足,本发明提出一种异构无人机集群分布式时空 协调控制方法,本发明的具体技术方案如下: 一种异构无人机集群分布式时空协调控制方法,其特征在于,包括以下步骤: S1:通过角色和功能分划形成异构无人机集群; 设期望队形是由等边三角形为基本空间拓扑单元铺展而成的晶格结构,对无人机 集群进行角色划分,分别为领航者、协调者和跟随者,设存在一个虚拟引导点,以一定速度 向目标区域运动,领航者的功能为跟随虚拟引导点,间接引导无人机集群进行同样的追随; 协调者的功能为协调其周围的邻机向着以自身为几何中心的正六边形的相应顶点运动;跟 随者是以在自己的邻机中找到协调者为目标,并根据协调者分配的期望相对位置信息指导 自身的运动; 领航者既从属于虚拟引导点也从属于协调者,跟随者从属于某一个协调者,两个 协调者之间地位等同不存在从属关系,无人机的角色在初始时设定并根据协调机制在运动 过程中进行调整; S2:设计异构无人机集群的机间协调机制; S2-1:定义邻机; 设无人机集群由N架无人机UAV组成,即V={UAVi|i=1,2,...,N},第i架无人机记 为UAVi,与其建立通信的无人机为UAVi的邻机,无人机的最大通信距离为Dcm,其通信范围是 以自身为圆心、Dcm为半径的圆;在t时刻,UAVi的位置向量为pi(t)=[xi(t) ,yi(t)]T,其中,xi (t)为UAVi的横坐标,yi(t)为UAVi的纵坐标,若满足||pi(t)-pj(t)||≤Dcm, 其 中,pj(t)为UAVj的位置向量,V为无人机集群的集合,则第j架无人机UAVj在t时刻是UAVi的 邻机,若UAVj是UAVi的邻机,则UAVi也必定是UAVj的邻机,二者能够进一步协调的前提是二 者互为邻机; S2-2:定义协调者邻机的期望相对位置; 期望队形是由等边三角形为基本空间拓扑单元铺展而成的晶格结构,期望每架无 人机与其周围的邻机都保持相等的期望机间距离,设这一相等的期望机间距离为Ds,且等 边三角形作为期望队形中空间拓扑单元的几何形状限制了每架无人机的邻机最大个数M= 6,以协调者UAVi自身位置为圆心、Ds为半径的圆周上的6个等分点即为其邻机的期望相对位 置,且按逆时针确定位置的序号,协调者将其邻机与各个期望相对位置一一对应; S2-3:确定异构无人机集群的机间协调机制: S2-3-1:当协调者UAVi与无人机X成为邻机后,无论X是何角色,UAVi需根据就近原 则将某个期望相对位置分配给X,并记录期望相对位置的分配情况; S2-3-2:当跟随者UAVj与无人机Y成为邻机后,若Y为协调者,则将接收到Y为自己 分配的期望相对位置序号;若Y为从属于协调者X的跟随者,X还有未分配且UAVj易到达的期 望相对位置,则Y充当“临时协调者”将该位置序号转化为相对于自身的位置序号并告知 UAVj,此时UAVj直接从属于Y,间接从属于X;X没有未分配且UAVj易到达的期望相对位置,Y的 角色将变为协调者,重复步骤S2-3-1的操作; S3:建立异构无人机集群分布式时空协调控制框架; 基于分布式模型预测控制建立分布式时空协调控制框架,利用子系统模型在预测 6 CN 111580545 A 说 明 书 3/11 页 时域中对输入的控制量进行在线优化,求得使代价函数最小化的最优控制序列,并取预测 时域中的第一个区间优化后的控制输入作为最优控制量作用于系统以更新系统的状态;通 过代价函数将本机信息和邻机信息进行耦合的方式来反映分布式模型预测方法中子系统 中间的交互作用;具体的,基于其建立异构无人机集群的分布式时空协调控制框架包括以 下步骤: S3-1:建立无人机运动学模型作为子系统模型; 考虑无人机运动学模型为非线性二阶系统,设无人机集群由N架无人机UAV组成, 即V={UAVi|i=1,2,...,N},在t时刻,第i架无人机状态向量为zi(t),控制向量为ui(t),其 运动方程为式(1): 其中, 为zi(t)的一阶导数,t0为初始时刻,z0为初始状态,fi表征了 zi (t)和ui(t)之间的非线性关系;状态向量为zi(t)、控制向量为ui(t)分别满足一定的物理性 能约束集Z、U,具体为式(2): zi(t;sc)∈Z ui(t;sc)∈U (2) 其中,sc为预测时域,sc的定义方法为:设预测周期为常量Tp,控制向量更新周期为 常量Tc,Tc











