
技术摘要:
本发明公开了一种插电式混合动力汽车电池电量轨迹规划方法及系统,其中方法包括:基于ITS系统及导航系统获取行驶路径上的预测车速及道路坡度;基于有序样本聚类算法分别对预测车速及道路坡度进行聚类;将聚类后的预测车速及道路坡度进行合并,将行驶路径分割为多段路段 全部
背景技术:
插电式混合动力汽车(PHEV)作为一种新能源汽车,结合了纯电动汽车与传统混合 动力汽车的优点,在保证了车辆的电驱动优势下又极大解决了续航里程焦虑的问题。目前 的PHEV主要由发动机、发电机、驱动电机、蓄电池组合控制系统等部件组成,当蓄电池电量 水平较高时,车辆可运行在纯电模式,而当电量水平较低时,发动机会介入工作并可给电池 充电;通过充电桩可给电池充电。 随着智能交通系统(ITS)和车联网的发展,准确地获得未来道路和交通信息成为 可能。在PHEV的能量管理系统中融合预测的未来道路和交通信息对电池的全局电量(SoC) 轨迹进行规划,然后通过模型预测控制或自适应ECMS等算法跟踪该电量轨迹并控制发动机 和电池的输出功率,可以实现系统高效率地工作,并有效降低汽车的燃油消耗。 如中国专利CN2015108863352公开了一种“控制混合动力车辆的系统和方法”,其 公开了通过行驶路线的相关信息预测车辆的未来速度,然后针对预测的未来速度导出行驶 路线的SoC轨迹线。上述方案需要使用动态规划算法求解全行程的SoC轨迹线,计算量较大, 实时性较差,且ITS无法获取车速轨迹的变化细节,使用动态规划算法求解SoC轨迹线并进 行跟踪的鲁棒性较低、控制效果欠佳。
技术实现要素:
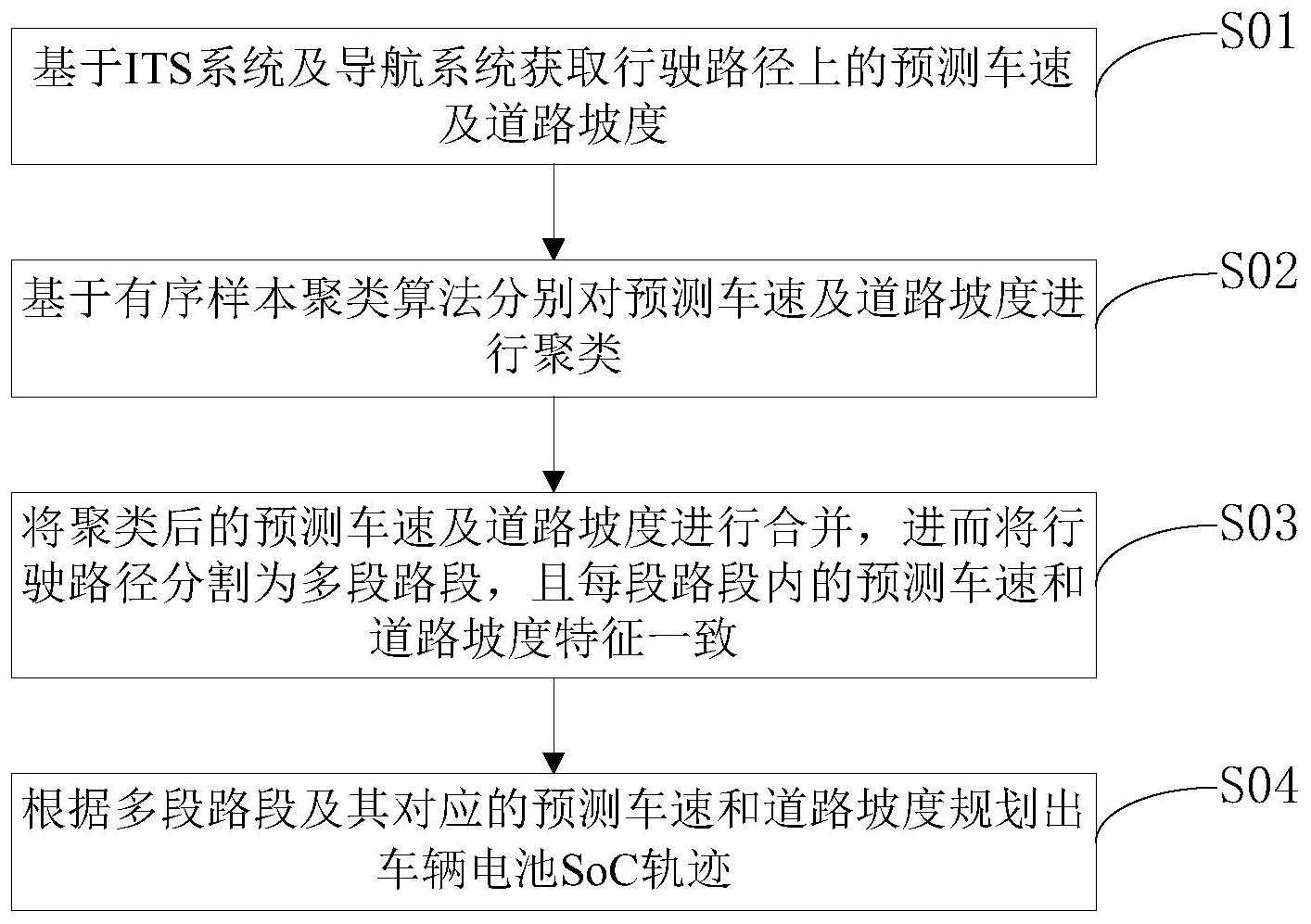
本发明提供了一种插电式混合动力汽车电池电量轨迹规划方法及系统,用于解决 现有技术中SoC轨迹规划算法计算量较大、鲁棒性较低的问题。 第一方面,提供了一种插电式混合动力汽车电池电量轨迹规划方法,包括: 基于ITS系统及导航系统获取行驶路径上的预测车速及道路坡度; 基于有序样本聚类算法分别对预测车速及道路坡度进行聚类; 将聚类后的预测车速及道路坡度进行合并,进而将行驶路径分割为多段路段,且 每段路段内的预测车速和道路坡度特征一致;其中,所述每段路段内的预测车速和道路坡 度特征一致是指:每段路段内的预测车速处于同一个预测车速类内,并且每段路段内的道 路坡度处于同一个道路坡度类内; 根据多段路段及其对应的预测车速和道路坡度规划出车辆电池SoC轨迹。 进一步地,所述基于有序样本聚类算法分别对预测车速及道路坡度进行聚类包括 如下步骤: 获取预测速度/道路坡度有序样本序列{x1 ,x2,x3,…,xn}及需要聚类的数目k,其 中xn为第n个预测速度/道路坡度样本; 定义一个预测速度/道路坡度类为G(i,j),其中包括数据序列{xi,xi 1,…xj},则预 7 CN 111591279 A 说 明 书 2/15 页 测速度/道路坡度类G(i,j)的直径D(i,j)定义为: 其中, 为预测速度/道路坡度类G(i,j)的中心,且: 设置目标函数e[p(n,k)],其可表示为: 其中,{i1,i2,…,ik,ik 1}为预测速度/道路坡度样本序列的最优分割点集,ik为第 k个分割点,且i1和ik 1分别为预测速度/道路坡度样本序列的第一个和最后一个样本; 通过动态规划求解使目标函数e[p(n,k)]的值最小,得到k个预测速度/道路坡度 类。 进一步地,预测速度/道路坡度样本序列需要聚类的数目k通过自适应确定,具体 如下步骤: Dr表示在某k值下预测速度/道路坡度类r内任意两点的距离之和: 将Dr标准化后记为标准直径Wk: 定义间隔量Gapn(k)为: 其中, 为log(Wk)的参考分布在n个预测速度/道路坡度样本下的期望, 其计算过程为:在预测速度/道路坡度样本的最大值与最小值范围内取数量与原预测速度/ 道路坡度样本相同的随机数,并求解其标准直径并标记为 该过程重复B 次,求 平均值即可求得 定义log(Wk)的标准差为sd(k): 定义 中的模拟误差定义sk: 8 CN 111591279 A 说 明 书 3/15 页 选择满足Gap(k)≥Gap(k 1)-sk 1的最小的k作为最优的预测速度/道路坡度样本 序列聚类数目。 通过上述自适应的方法确定聚类的数目k,可以适应不同地形和车速轨迹特征,针 对不同特征的数据确定不同的最优聚类数目,可使聚类结果更加合理,从而进一步使最终 规划的SoC轨迹更接近于全局最优的SoC轨迹。 进一步地,所述根据多段路段及其对应的预测车速和道路坡度规划出车辆电池 SoC轨迹具体包括: 根据每段路段对应的预测车速和道路坡度得到每一路段的平均道路阻力,并根据 平均道路阻力的正负,预测对应路段上SoC轨迹下降或上升; 对于SoC上升的路段,其各路段上SoC轨迹斜率ku: 其中,△SoCu为对应SoC上升路段上的SoC增量,lu为对应SoC上升路段的里程; 对于SoC下降的路段,先选择其中一个路段作为标准路段,计算标准斜率kst和各子 路段的斜率kd: 其中,SoC0为初始电池电量,SoCmin为行程结束时电池电量,send为总里程,ld为对应 SoC下降路段的里程,△sn为标准路段与对应SoC下降路段在SoC变化量相同情况下的里程 差; 将所有路段的SoC轨迹按位置域上的相对位置进行组合,得到整个行驶路径对应 的SoC轨迹。 进一步地,所述△sn通过如下公式得到; 其中, 为标准路段对应的平均道路阻力, 为对应SoC下降路段的平均道路阻 力; 所述△SoCu通过如下公式得到: 其中,ηt为电能转化效率系数, 为对应SoC上升路段的平均道路阻力, 为电池 端电压平均值,Qnom为电池额定容量。 第二方面,一种插电式混合动力汽车电池电量轨迹规划系统,包括: 车速及坡度获取模块,用于基于ITS系统及导航系统获取行驶路径上的预测车速 及道路坡度; 9 CN 111591279 A 说 明 书 4/15 页 路段分割模块,用于基于有序样本聚类算法分别对预测车速及道路坡度进行聚 类,并将聚类后的预测车速及道路坡度进行合并,进而将行驶路径分割为多段路段,且每段 路段内的预测车速和道路坡度均相同; SoC轨迹规划模块,根据多段路段及其对应的预测车速和道路坡度规划出车辆电 池SoC轨迹。 进一步地,所述基于有序样本聚类算法分别对预测车速及道路坡度进行聚类包括 如下步骤: 获取预测速度/道路坡度有序样本序列{x1 ,x2,x3,…,xn}及需要聚类的数目k,其 中xn为第n个预测速度/道路坡度样本; 定义一个预测速度/道路坡度类为G(i,j),其中包括数据序列{xi,xi 1,…xj},则预 测速度/道路坡度类G(i,j)的直径D(i,j)定义为: 其中, 为预测速度/道路坡度类G(i,j)的中心,且: 设置目标函数e[p(n,k)],其可表示为: 其中,{i1,i2,…,ik,ik 1}为预测速度/道路坡度样本序列的最优分割点集,ik为第 k个分割点,且i1和ik 1分别为预测速度/道路坡度样本序列的第一个和最后一个样本; 通过动态规划求解使目标函数e[p(n,k)]的值最小,得到k个预测速度/道路坡度 类。 进一步地,预测速度/道路坡度样本序列需要聚类的数目k通过自适应确定,具体 如下步骤: Dr表示在某k值下预测速度/道路坡度类r内任意两点的距离之和: 将Dr标准化后记为标准直径Wk: 定义间隔量Gapn(k)为: 其中, 为log(Wk)的参考分布在n个预测速度/道路坡度样本下的期望,其 计算过程为:在预测速度/道路坡度样本的最大值与最小值范围内取数量与原预测速度/道 10 CN 111591279 A 说 明 书 5/15 页 路坡度样本相同的随机数,并求解其标准直径并标记为 该过程重复B次, 求 平均值即可求得 定义log(Wk)的标准差为sd(k): 定义 中的模拟误差定义sk: 选择满足Gap(k)≥Gap(k 1)-sk 1的最小的k作为最优的预测速度/道路坡度样本 序列聚类数目。 进一步地,所述根据多段路段及其对应的预测车速和道路坡度规划出车辆电池 SoC轨迹具体包括: 根据每段路段对应的预测车速和道路坡度得到每一路段的平均道路阻力,并根据 平均道路阻力的正负,预测对应路段上SoC轨迹下降或上升; 对于SoC上升的路段,其各路段上SoC轨迹斜率ku: 其中,△SoCu为对应SoC上升路段上的SoC增量,lu为对应SoC上升路段的里程; 对于SoC下降的路段,先选择其中一个路段作为标准路段,计算标准斜率kst和各子 路段的斜率kd: 其中,SoC0为初始电池电量,SoCmin为行程结束时电池电量,send为总里程,ld为对应 SoC下降路段的里程,△sn为标准路段与对应SoC下降路段在SoC变化量相同情况下的里程 差; 将所有路段的SoC轨迹按位置域上的相对位置进行组合,得到整个行驶路径对应 的SoC轨迹。 进一步地,所述△sn通过如下公式得到; 其中, 为标准路段对应的平均道路阻力, 为对应SoC下降路段的平均道路阻 力; 所述△SoCu通过如下公式得到: 11 CN 111591279 A 说 明 书 6/15 页 其中,ηt为电能转化效率系数, 为对应SoC上升路段的平均道路阻力, 为电池 端电压平均值,Qnom为电池额定容量。 有益效果 本发明提出了一种插电式混合动力汽车电池电量轨迹规划方法及系统,该方案可 以根据ITS系统及导航系统中获取的未来的行程信息进行快速的SoC轨迹规划。SoC轨迹规 划根据不同路段的能量需求特征进行,车速与坡度是影响路段能量需求特征的直接因素, 故根据预测车速及道路坡度两个特征进行聚类,然后合并从而将行驶路径分割为多段具有 不同能量需求的路段,进而基于多段具有不同能量需求的路段生成SoC参考轨迹,该方案由 于利用了全局最优电量消耗轨迹的特征,所以在应用到能量管理控制中更具有节能潜力。 该方案中算法较现有方案(全局动态规划算法生成最优轨迹或神经网络等等)计算量较低, 且比一般基于简单规则的SoC参考轨迹设计方法更接近于全局最优的SoC轨迹;由于计算量 较低,可以根据交通变化状况以一定频率刷新,实时性好,鲁棒性较高。得到的SoC轨迹规划 结果可以应用于能量管理算法中,令下层的优化控制算法(模型预测控制算法、自适应等效 燃油消耗最小策略等)跟踪该SoC轨迹,实现能量的高效分配。 附图说明 图1是本发明实施例提供的一种插电式混合动力汽车电池电量轨迹规划方法流程 图; 图2是本发明实施例提供的SoC轨迹下降段两个单斜率的SoC轨迹规划示意图; 图3是本发明实施例提供的SoC轨迹下降段连续不同斜率的SoC轨迹规划示意图; 图4是本发明实施例提供的包含单个SoC轨迹上升段且SoC轨迹下降段斜率相同的 SoC轨迹规划示意图; 图5是本发明实施例提供的一个综合情况下SoC轨迹规划示意图; 图6是本发明实施例提供的一种插电式混合动力汽车电池电量轨迹规划系统结构 示意图; 图7是本发明实施例提供的某一道路的预测车速与高程信息示意图; 图8是图7提供的实施例的聚类分割结果及SoC规划结果示意图。











