
技术摘要:
本发明提供一种具有自适应能力的爬壁机器人,涉及行走机器人技术领域,以解决由于船身的弧面和不平整的结构,致使常规的磁吸式和负压式的爬壁机器人在经过不平整的位置时,易致使爬壁机器人脱落,从而造成设备损坏,而且在经过狭窄的空间时,爬壁机器人容易由于控制人 全部
背景技术:
爬壁机器人可以在垂直墙壁上攀爬并完成作业的自动化机器人。爬壁机器人又称 为壁面移动机器人,因为垂直壁面作业超出人的极限,因此在国外又称为极限作业机器人。 爬壁机器人必须具备吸附和移动两个基本功能,而常见吸附方式有负压吸附和永磁吸附两 种。其中负压方式可以通过吸盘内产生负压而吸附于壁面上,不受壁面材料的限制;永磁吸 附方式则有永磁体和电磁铁两种方式,只适用于吸附导磁性壁面。爬壁机器人主要用于石 化企业对圆柱形大罐进行探伤检查或喷漆处理,或进行建筑物的清洁和喷涂。在核工业中 用来检查测厚等,还可以用于消防和造船等行业。 如专利申请书CN201210130261.6中一种爬壁机器人,具有一行走控制底盘,该行 走控制底盘包括:吸附装置,用于使爬壁机器人在任何方向上都能依附在储油罐壁;连杆机 构,与吸附装置机械连接,通过连杆机构的运动,使爬壁机器人在储油罐壁行走;以及多个 驱动轮,与储油罐壁接触,且刚性连接至连杆机构,当连杆机构中的连杆沿某一支点顺时针 或逆时针旋转时,驱动轮抬升或下压储油罐壁。采用本发明,通过吸附装置将其牢固地依附 在储油罐壁的表面,并且利用连杆机构的运动来带动驱动轮向前滚动,从而实现在储油罐 壁任意方向上的自由行走。相比于现有技术,该爬壁机器人可降低储油罐壁的检测成本,提 高工作效率,而且无需人工在危险作业环境中进行油罐清洗和检测。 现有的爬壁机器人在进行船身清理或者修补时经常用到,但是由于船身的弧面和 不平整的结构,致使常规的磁吸式和负压式的爬壁机器人在经过不平整的位置时,易致使 爬壁机器人脱落,从而造成设备损坏,而且在经过狭窄的空间时,爬壁机器人容易由于控制 人员的视线障碍,而致使控制精度难以掌控精确而发生碰撞,造成车身损坏。 于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供一种具有自适应能力 的爬壁机器人,以期达到更具有更加实用价值性的目的。
技术实现要素:
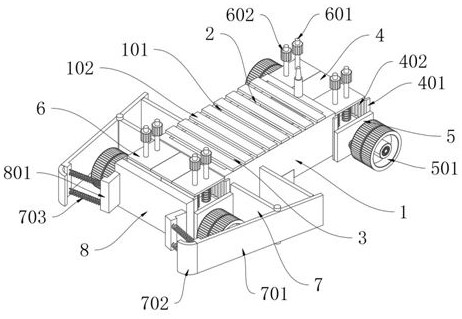
为了解决上述技术问题,本发明提供一种具有自适应能力的爬壁机器人,以解决 由于船身的弧面和不平整的结构,致使常规的磁吸式和负压式的爬壁机器人在经过不平整 的位置时,易致使爬壁机器人脱落,从而造成设备损坏,而且在经过狭窄的空间时,爬壁机 器人容易由于控制人员的视线障碍,而致使控制精度难以掌控精确而发生碰撞,造成车身 损坏的问题。 本发明具有自适应能力的爬壁机器人的目的与功效,由以下具体技术手段所达 成: 一种具有自适应能力的爬壁机器人,包括车体;所述车体中内置有PLC控制器和蓄电 4 CN 111572663 A 说 明 书 2/5 页 池,其中PLC控制器位于中部后端,而蓄电池位于中部前端;所述车体的前端和后端中部分 别固定安装有端架;所述端架的左端和右端分别竖向滑动安装有移动机构;所述移动机构 的上端通过缓冲机构与端架的上端滑动相连接;所述车体的左端侧壁和右端侧壁的中部靠 前处分别固定安装有避障机构; 前侧的所述端架的前端侧壁上固定安装有固定架,而固定架的左端和右端分别与对应 一侧的避障机构的前端固定相连接;前后两个所述端架的底部均固定安装有永磁块,而车 体底部平面中部左右两侧也固定安装有永磁块,其永磁块的下端不与墙壁相接触; 所述固定架包括角块,所述固定架前端侧壁的左端和右端棱边处分别固定安装有内折 的L状的角块,其角块的前端与挡板上的弹簧B固定相连接。 进一步的,所述车体包括容置槽、安装格栅板、无线收发器和翅板,所述车体的顶 部平面中开设有矩形状的容置槽,所述容置槽的上端槽口处安装间隔均匀的横向的安装格 栅板,所述安装格栅板的后端中部固定垂直向上固定安装有无线收发器,所述车体左右侧 壁的的中部分别垂直向外固定安装有竖向的翅板。 进一步的,所述端架包括导向板和导向槽,所述端架的前后两侧分别固定安装有L 状的导向板,其导向板的内侧相对的侧壁上竖向间隔均匀开设有半圆柱状的导向槽,而同 侧的两个导向板之间分别与对应一侧的移动机构竖向滑动相连接。 进一步的,所述移动机构包括防滑轮、从动齿轮、马达电机、内架板、导向凸柱和主 动齿轮,所述移动机构的中部外侧通过横向转动的转轴转动安装有防滑轮,所述防滑轮内 侧的转轴上固定安装有从动齿轮,所述移动机构内转轴的后侧横向固定安装有马达电机, 其马达电机的转轴穿过移动机构的外壁固定安装有与从动齿轮相互啮合的主动齿轮,所述 移动机构的内侧固定安装有U状的内架板,其内架板的前端侧壁和后端侧壁上均设置有与 导向板上的导向槽相适应的导向凸柱。 进一步的,所述缓冲机构包括缓冲杆、挡块、连接板和弹簧A,所述缓冲机构的中部 垂直滑动安装有两个对称的缓冲杆,其缓冲杆的下端固定安装有水平的连接板,所述连接 板固定安装在移动机构上的内架板的上端,所述缓冲杆穿出缓冲机构上端的部分上螺接有 挡块,而缓冲杆位于缓冲机构主体与连接板之间的部分上套装有弹簧A。 进一步的,所述避障机构包括挡板、引导板和弹簧B,所述避障机构的外端棱边处 通过铰轴转动安装有挡板,其挡板的前端固定安装有内弯的弧状的引导板,而引导板的内 侧根部固定安装有两个上下对称的弹簧B,其弹簧B的另一端与固定架固定相连接,所述挡 板的后端则支撑在翅板的外端棱边处。 与现有技术相比,本发明具有如下有益效果: 由于端架的前后两侧分别固定安装有L状的导向板,其导向板的内侧相对的侧壁上竖 向间隔均匀开设有半圆柱状的导向槽,而同侧的两个导向板之间分别与对应一侧的移动机 构竖向滑动相连接,可通过端架为移动机构的上下活动提供引导空间,并且移动机构的中 部外侧通过横向转动的转轴转动安装有防滑轮,防滑轮内侧的转轴上固定安装有从动齿 轮,移动机构内转轴的后侧横向固定安装有马达电机,其马达电机的转轴穿过移动机构的 外壁固定安装有与从动齿轮相互啮合的主动齿轮,移动机构的内侧固定安装有U状的内架 板,其内架板的前端侧壁和后端侧壁上均设置有与导向板上的导向槽相适应的导向凸柱, 可通过马达电机的旋转驱动防滑轮进行转动,并且能够通过PLC控制器控制前端两个马达 5 CN 111572663 A 说 明 书 3/5 页 电机的转速,形成转速差,以便于实现转弯的功能,而缓冲机构的中部垂直滑动安装有两个 对称的缓冲杆,其缓冲杆的下端固定安装有水平的连接板,连接板固定安装在移动机构上 的内架板的上端,缓冲杆穿出缓冲机构上端的部分上螺接有挡块,而缓冲杆位于缓冲机构 主体与连接板之间的部分上套装有弹簧A,当遇到坑洼地带时,移动机构可在缓冲机构的作 用下在端架中上下移动,以便于适应表面结构的变化,避免机器人从船壁身上脱落。 由于避障机构的外端棱边处通过铰轴转动安装有挡板,其挡板的前端固定安装有 内弯的弧状的引导板,而引导板的内侧根部固定安装有两个上下对称的弹簧B,其弹簧B的 另一端与固定架固定相连接,挡板的后端则支撑在翅板的外端棱边处,当遇到障碍物时,可 通过引导板与障碍物相接触后矫正车身继续前行,避免直撞障碍物损坏机器人。 本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本 发明的研究和实践而为本领域的技术人员所理解。 附图说明 图1是本发明的右前上方轴视结构示意图。 图2是本发明的左后上方轴视结构示意图。 图3是本发明的右前下方轴视结构示意图。 图4是本发明的图3中放大部分结构示意图。 图5是本发明的俯视结构示意图。 图6是本发明的安装格栅状结构去除状态轴视结构示意图。 图7是本发明的端架部分轴视结构示意图。 图8是本发明的端架部分与移动机构部分相分离状态轴视结构示意图。 图中,部件名称与附图编号的对应关系为: 1、车体;101、容置槽;102、安装格栅板;103、无线收发器;104、翅板;2、PLC控制器;3、蓄 电池;4、端架;401、导向板;402、导向槽;5、移动机构;501、防滑轮;502、从动齿轮;503、马达 电机;504、内架板;505、导向凸柱;506、主动齿轮;6、缓冲机构;601、缓冲杆;602、挡块;603、 连接板;604、弹簧A;7、避障机构;701、挡板;702、引导板;703、弹簧B;8、固定架;801、角块; 9、永磁块。











