
技术摘要:
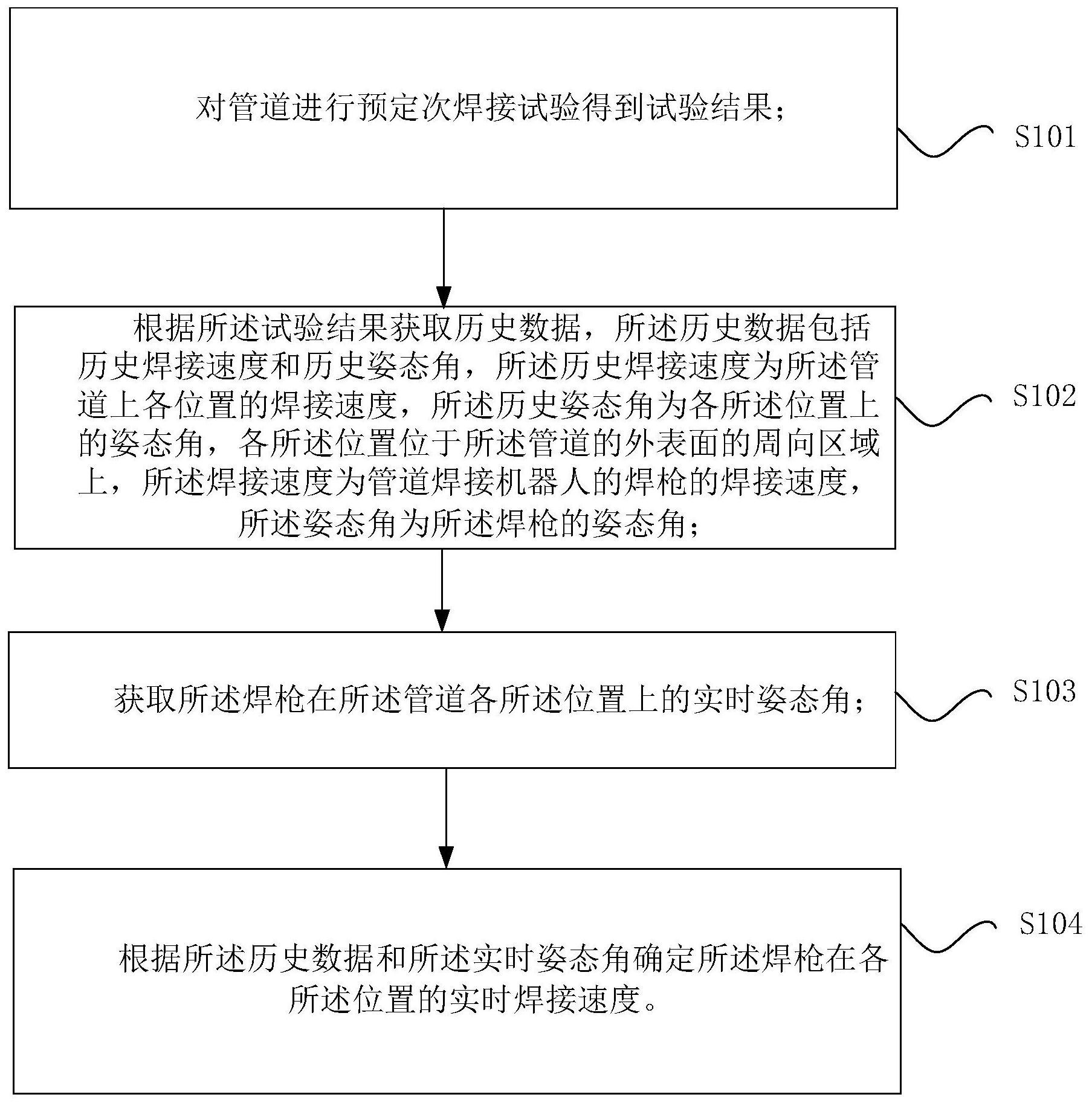
本申请提供了一种管道焊接速度的确定方法、确定装置、存储介质、处理器与焊接装置,该确定方法包括:对管道进行预定次焊接试验得到试验结果;根据试验结果获取历史数据,历史数据包括历史焊接速度和历史姿态角,历史焊接速度为管道上各位置的焊接速度,历史姿态角为各 全部
背景技术:
目前的管道焊接机器人没有焊接位置监控或监控位置的数据点很少,导致管道全 位置焊接时焊接速度无法自动调节或是离散式调节,速度突变容易产生焊接的阶跃成型, 影响焊接质量和成型的美观性。 在
技术实现要素:
部分中公开的以上信息只是用来加强对本文所描述技术的











