
技术摘要:
本发明涉及精确化的穿梭车及仓储盘点领域,具体是一种用于穿梭车的精确盘点方法;其特征是:将光电传感器向内斜45°,使其照射到穿梭车本体的托盘底部且跟随穿梭车本体的车盖升降,还包括在穿梭车本体从A处移动到B处的过程中,将B侧光电检测到的第一个跳变坐标记录并计 全部
背景技术:
对于大型仓储物流领域而言,由于仓库内的货物数量庞大,单纯依靠人工盘点存 在效率低下并且不够准确的问题。为此,现代化的智能物流仓储行业中,往往通过穿梭式货 架和配套的穿梭车、托盘来代替人工完成盘点工作。但是由于托盘的多样性和现场工况的 不确定性导致了市面上大多数穿梭车的点数功能都存在±1的误差,从而最终导致当前穿 梭车的自动盘点功能实际上是无法实现精确测出每个巷道内的托盘数量的。
技术实现要素:
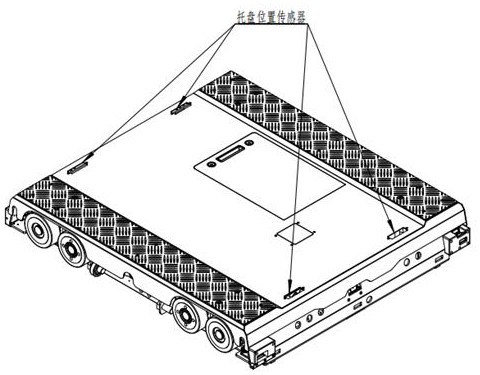
本发明的目的在于克服上述缺陷,具体是提出一种通过对穿梭车的结构进行改良 并辅以新的计数手段而形成一种适用于穿梭车的精确盘点方法。 为了达到上述目的,本发明是这样实现的: 一种用于穿梭车的精确盘点方法,包括带有光电传感器的穿梭车本体,将光电传感器 向内斜45°,使其照射到穿梭车本体的托盘底部且跟随穿梭车本体的车盖升降,所述光电传 感器每两个为一组,信号冗余;还包括下述盘点方法: 步骤1、在穿梭车本体从A处移动到B处的过程中,将B侧光电检测到的第一个跳变坐标 记录并计数加1; 步骤2、根据步骤1所得数值而记录坐标并自动计算禁止检测的范围,计算公式为:坐标 托盘深度 间隔; 步骤3、待小车通过步骤2所获得的范围值后又放开检测条件,如果又检测到跳变信号 则重复上一步。 所述的用于穿梭车的精确盘点方法,光电传感器的类型为背景抑制型光电传感 器。 所述的用于穿梭车的精确盘点方法,:所述盘点方法的步骤1~步骤3,还包括下述 具体步骤: 步骤1、在同一巷道托盘尺寸相同的场景或情况下,执行如下动作: 步骤1.1、获取托盘的深度和存放间隔数据,其中,需要先将穿梭车全程来回跑一次整 个巷道; 步骤1.2、CPU芯片解析所获得的数据; 步骤1.3、将解析完毕的数据发送到执行端; 步骤1.4、执行端接收到数据后,进行相应动作。 所述的用于穿梭车的精确盘点方法,采用以下代码实现上述盘点方法: IF #穿梭车移动中 THEN// 在穿梭车A端至B端正方向的移动中 3 CN 111582426 A 说 明 书 2/3 页 IF #托盘检测信号 AND NOT #关闭检测 THEN// 如果托盘检测有信号且检测条 件已开启 #计数值 = 1;// 计数值加1 #记录坐标 :=#行走轴坐标 ;// 并记录当前坐标 #关闭检测 := 1;// 禁止检测 END_IF; IF #关闭检测 AND #行走轴坐标 > #记录坐标 #托盘深度_1 #间隔 THEN// 当行走坐标离开禁止检测区域 #关闭检测 := 0;// 重新开启检测条件 ; END_IF; ELSE #关闭检测 := 0;// 穿梭车停止状态下开启检测 #计数值 := 0;// 并将计数值归零 ; END_IF; 本盘点方法中,每检测到一个托盘信号就会更新一次坐标,从而减少累计误差,而且本 盘点方法中的计算过程不用设置巷道深度。相比传统盘点方法而言,本盘点方法同样也不 用设置托盘横梁数,而且不受限于托盘底部形状也不受巷道内其他异物的影响,从而本盘 点方法相较于传统盘点方法而言能够避免±1的误差,从而达到精确盘点的目的。 附图说明 图1为本发明中传感器位置布局示意图。











