
技术摘要:
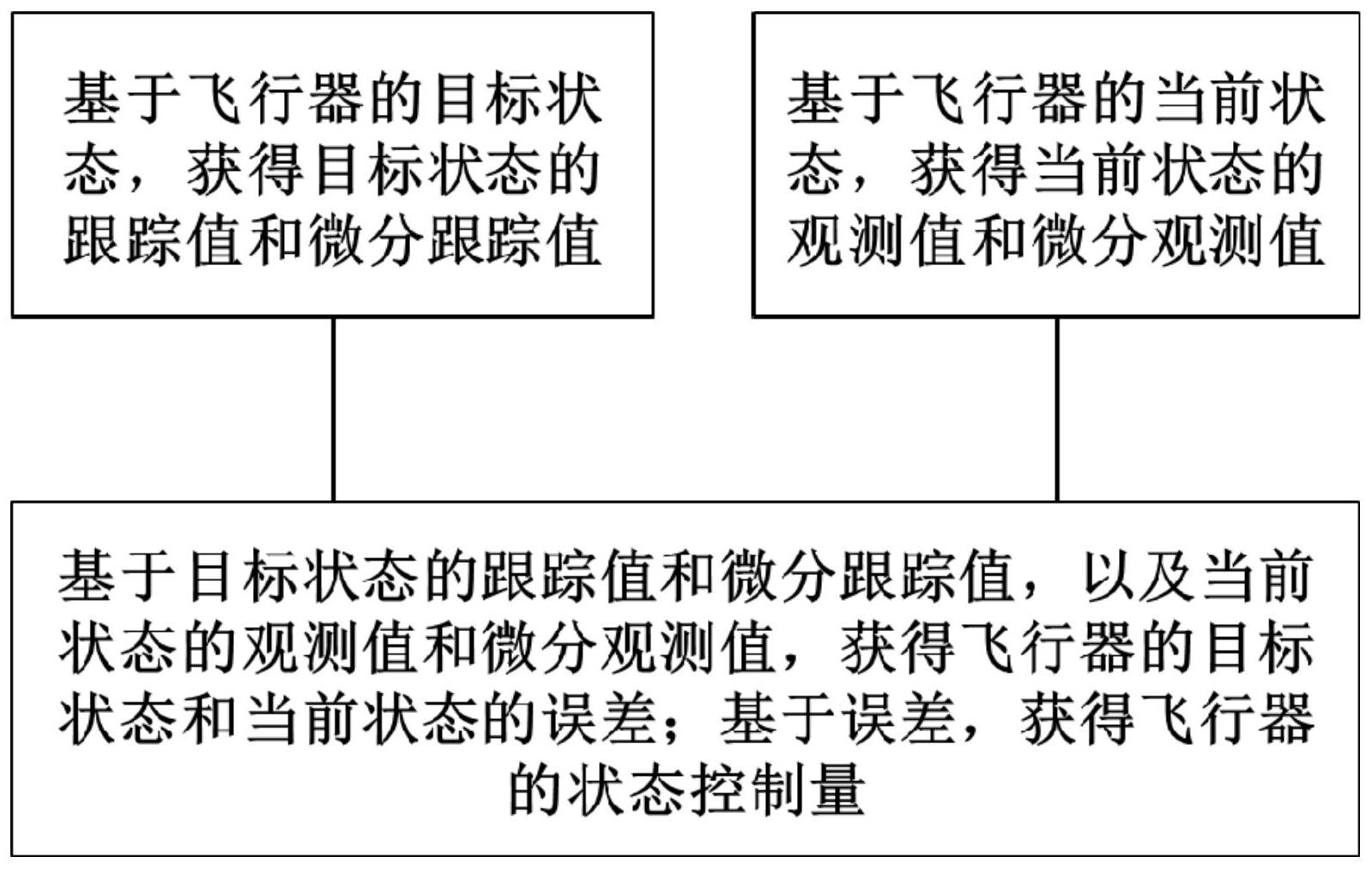
本发明提供了一种飞行器控制方法,包括:基于飞行器的目标状态,获得目标状态的跟踪值和微分跟踪值;基于飞行器的当前状态,获得当前状态的观测值和微分观测值;基于目标状态的跟踪值和微分跟踪值,以及当前状态的观测值和微分观测值,获得飞行器的目标状态和当前状态 全部
背景技术:
现有技术中,无论是消费级的还是行业级的飞行器(例如无人机)大多数都是采用 传统的串级pid控制方法来实现位移与姿态控制,但是传统的串级pid控制方法存在比较严 重的几个问题,①是面对瞬态响应会存在超调,②是达到稳态后,即便有积分控制也难以实 现较小误差,③是无法解决外部扰动,一旦出现扰动会面临炸机的危险。这些问题针对实际 应用的飞行器都是比较常见的问题,很多应用场景也会对这些问题与控制器进行考验,传 统的串级pid很难经受住诸多的考验。
技术实现要素:
为了解决上述技术问题中的至少一个,本发明提供了一种飞行器控制方法、飞行 器控制装置、电子设备及可读存储介质。 根据本发明的一个方面,一种飞行器控制方法,包括:基于飞行器的目标状态,获 得目标状态的跟踪值和微分跟踪值;基于飞行器的当前状态,获得当前状态的观测值和微 分观测值;基于目标状态的跟踪值和微分跟踪值,以及当前状态的观测值和微分观测值,获 得飞行器的目标状态和当前状态的误差;以及基于误差,获得飞行器的状态控制量。 根据本发明的至少一个实施方式,目标状态的微分跟踪值包括一阶微分跟踪值 和/或二阶微分跟踪值;当前状态的微分观测值包括一阶微分观测值和/或二阶微分观测 值。 根据本发明的至少一个实施方式,目标状态的微分跟踪值包括一阶微分跟踪值; 当前状态的微分观测值包括一阶微分观测值。 根据本发明的至少一个实施方式,目标状态的微分跟踪值包括一阶微分跟踪值和 二阶微分跟踪值;当前状态的微分观测值包括一阶微分观测值和二阶微分观测值。 根据本发明的至少一个实施方式,目标状态包括目标位移和目标姿态角。 根据本发明的至少一个实施方式,目标姿态角包括目标横滚角、目标俯仰角和目 标偏航角。 根据本发明的至少一个实施方式,目标状态的跟踪值和微分跟踪值包括:目标位 移跟踪值、目标姿态角跟踪值、目标位移速度跟踪值和目标姿态角速度跟踪值。 根据本发明的至少一个实施方式,目标状态的跟踪值和微分跟踪值包括:目标位 移跟踪值、目标姿态角跟踪值、目标位移速度跟踪值、目标姿态角速度跟踪值、目标位移加 速度跟踪值、目标姿态角加速度跟踪值。 根据本发明的至少一个实施方式,目标状态的跟踪值和微分跟踪值包括:目标位 移跟踪值、目标偏航角跟踪值、目标横滚角跟踪值、目标俯仰角跟踪值、目标位移速度跟踪 5 CN 111580534 A 说 明 书 2/12 页 值、目标横滚角速度跟踪值、目标俯仰角速度跟踪值和目标偏航角速度跟踪值。 根据本发明的至少一个实施方式,目标状态包括目标位移和目标偏航角。 根据本发明的至少一个实施方式,目标状态的跟踪值和微分跟踪值包括:目标位 移跟踪值、目标偏航角跟踪值、目标位移速度跟踪值和目标偏航角速度跟踪值。 根据本发明的至少一个实施方式,当前状态包括当前位移和当前姿态角。 根据本发明的至少一个实施方式,当前姿态角包括当前横滚角、当前俯仰角和当 前偏航角。 根据本发明的至少一个实施方式,当前状态的观测值和微分观测值包括:当前位 移观测值、当前姿态角观测值、当前位移速度观测值、当前姿态角速度观测值、当前位移加 速度观测值、当前姿态角加速度观测值。 根据本发明的至少一个实施方式,飞行器的状态控制量包括高度控制量、水平位 移控制量和姿态角控制量。 根据本发明的至少一个实施方式,高度控制量通过以下公式获得: U1=m(z5 g α5(z6-α5z5) α6z6)/(cosφcosθ) 其中,U1为高度控制量,m为飞行器质量,g为重力加速度,α5~α6分别为可调且为正 的参数,φ为横滚角,θ为俯仰角; z5=zd1-z1 z6=zd2 α5z5-z2; 其中,z1和z2分别为飞行器当前状态的Z方向当前位移观测值和Z方向当前位移速 度观测值;zd1和zd2分别为飞行器目标状态的Z方向目标位移跟踪值和Z方向目标位移速度 跟踪值。 根据本发明的至少一个实施方式,水平位移控制量通过以下公式获得: ux=m(z1 α1(z2-α1z1) α2z2)/U1 uy=m(z3 α3(z4-α3z3) α4z4)/U1 其中,ux为X方向控制量,uy为Y方向控制量; z1=xd1-x; z2=xd2 α1z1-u; z3=yd1-y; z4=yd2 α3z3-v; 其中,u为飞行器在X方向的当前速度,v为飞行器在Y方向的当前速度;α1~α4分别 为可调且为正的参数;x为飞行器当前状态的X方向当前位移观测值,y为飞行器当前状态的 Y方向当前位移观测值;xd1和xd2分别为飞行器目标状态的X方向目标位移跟踪值和X方向 目标位移速度跟踪值;yd1和yd2分别为飞行器目标状态的Y方向目标位移跟踪值和Y方向目 标位移速度跟踪值。 根据本发明的至少一个实施方式,姿态角控制量通过以下公式获得: 6 CN 111580534 A 说 明 书 3/12 页 a1~a5为中间控制参数;b1~b3为中间控制参数;α7~α12分别为可调且为正的参 数; Z7~Z12通过下列各式获得: z7=phid1-phi; z8=phid2 α7z7-phi2; z9=thetad1-theta; z10=thetad2 α9z9-theta2; z11=psid1-psi; z12=psid2 α11z11-psi2; 其中,phid1为飞行器目标状态的横滚角跟踪值,phi为飞行器当前状态的横滚角 观测值,phid2为飞行器目标状态的横滚角速度跟踪值,phi2为飞行器当前状态的横滚角速 度观测值,thetad1为飞行器目标状态的俯仰角跟踪值,theta为飞行器当前状态的俯仰角 观测值,thetad2为飞行器目标状态的俯仰角速度跟踪值,theta2为飞行器当前状态的俯仰 角速度观测值,psid1为飞行器目标状态的偏航角跟踪值,psi为飞行器当前状态的偏航角 观测值,psid2为飞行器目标状态的偏航角速度跟踪值,psi2为飞行器当前状态的俯仰角速 度观测值。 根据本发明的另一方面,一种无人机控制装置,包括: 跟踪微分器,跟踪微分器基于飞行器的目标状态,获得所述目标状态的跟踪值和 微分跟踪值; 扩张状态观测器,扩张状态观测器基于飞行器的当前状态,获得所述当前状态的 观测值和微分观测值;以及 Backstepping控制器,Backstepping控制器基于目标状态的跟踪值和微分跟踪 值,以及当前状态的观测值和微分观测值,获得飞行器的目标状态和当前状态的误差,基于 所述误差,获得飞行器的状态控制量。 根据本发明的又一方面,一种电子设备,包括:存储器,存储器存储计算机执行指 令;以及处理器,处理器执行存储器存储的计算机执行指令,使得处理器执行上述的方法。 根据本发明的再一方面,一种可读存储介质,可读存储介质中存储有计算机执行 指令,计算机执行指令被处理器执行时用于实现上述的方法。 附图说明 附图示出了本发明的示例性实施方式,并与其说明一起用于解释本发明的原理, 其中包括了这些附图以提供对本发明的进一步理解,并且附图包括在本说明书中并构成本 说明书的一部分。 图1是根据本发明一个实施方式的飞行器控制方法的示意性流程图。 图2是根据本发明又一个实施方式的飞行器控制方法的示意性流程图。 图3是根据本发明又一个实施方式的飞行器控制方法的示意性流程图。 图4是根据本发明一个实施方式的飞行器控制装置的示意性框图。 图5是根据本发明的一个实施方式的飞行器控制方法BTE与传统pid控制方法的三 7 CN 111580534 A 说 明 书 4/12 页 维位移跟踪对比示意图。 图6是根据本发明的一个实施方式的飞行器控制方法BTE与传统pid控制方法的三 维轨迹跟踪对比示意图。 图7是根据本发明的一个实施方式的飞行器控制方法BTE与传统pid控制方法的姿 态角跟踪对比示意图。 图8是根据本发明的一个实施方式的飞行器控制方法BTE与传统pid控制方法的控 制输入跟踪对比示意图。 图9是图7的部分放大示意图。 图10是图8的部分放大示意图。 图11是根据本发明一个实施方式的电子设备的示意性视图。











