
技术摘要:
本发明涉及智能家居设计领域,更具体的说,涉及一种数字化室内设计方法、装置、设备及可读存储介质。本发明的数字化室内设计方法包括S1、沿单一空间边界建立轴线系统;S2、利用启发式算法,依次布置当前布局方案的功能模块,选择待处理方案中区域期望值最大的布局方案 全部
背景技术:
传统的室内家居设计,专业门槛较高,需要设计师花费大量时间进行设计 建模工 作。随着数字时代的到来,利用数字技术辅助室内家居设计成为新的趋 势。 目前的数字化室内设计方法过于简单而且并不实用,如中国发明 CN110442952A 公开了一种规则虚拟空间家具智能布局的方法,包括如下步骤: 步骤一:数字化,通过后台 服务器将空间信息、家具信息以及家具布局约束信 息进行数字化,得到虚拟空间以及家具 单元;步骤二:在虚拟空间中定义家具 布局运算的基本规则,得到规则虚拟空间;步骤三: 将家具单元在规则虚拟空 间内进行布置摆放;步骤四:判断家具布置是否符合所有家具布 局运算的基本 规则;步骤五:导出家具布置结果。 但是,该发明有以下缺点: 1)只能适应简单空间布置,对于实际户型平面图拓扑关系复杂,该技术 方案无法 判断家具布置的合理位置,难以实现家具的实际智能布局; 2)只能适应简单功能布置,例如已知该虚拟空间是客厅场景,如果涉及 多个复杂 功能,例如书房、餐厅等进行统一设计,则该技术方案难以实现。
技术实现要素:
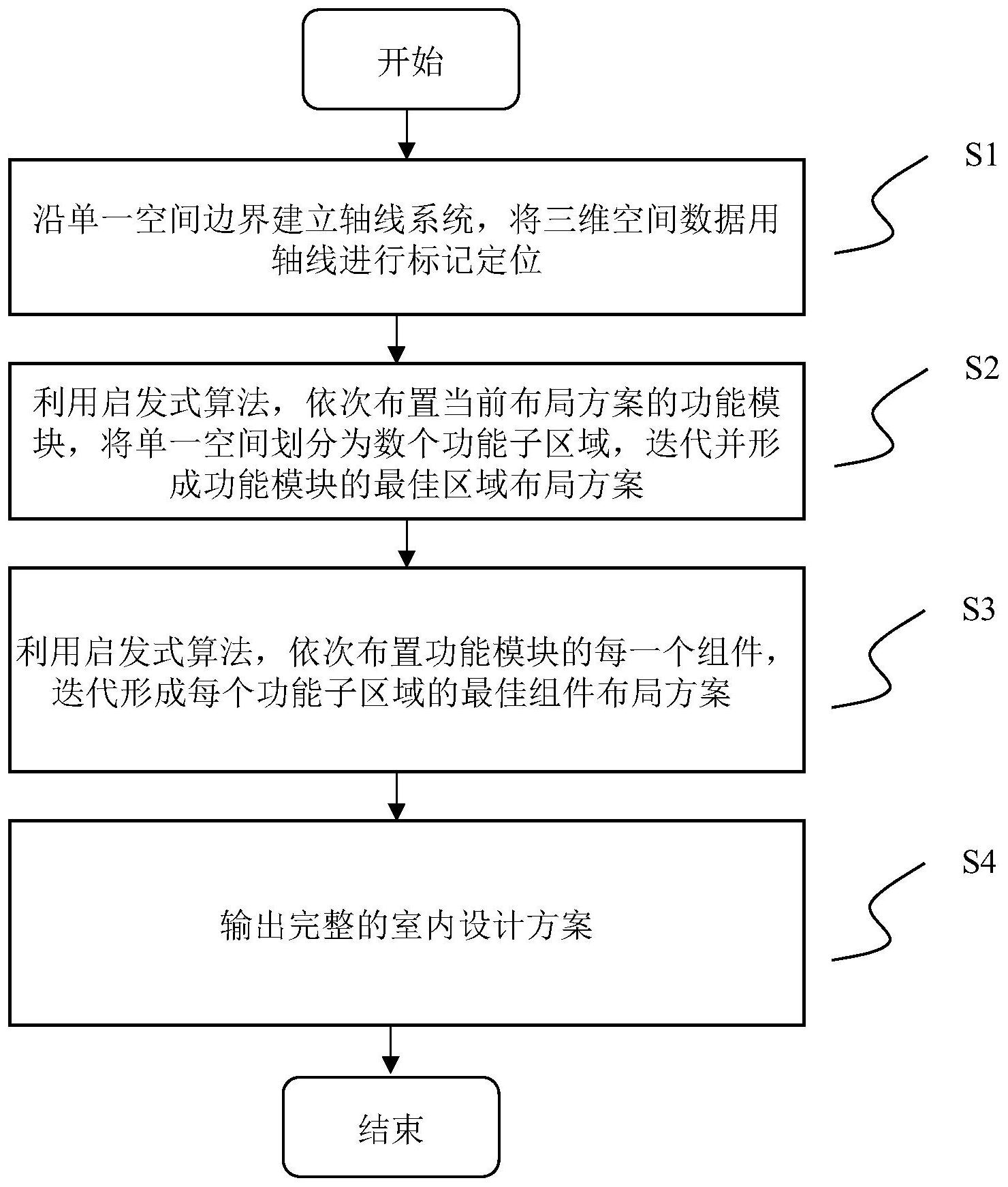
本发明的目的是提供一种数字化室内设计方法,解决现有技术的室内设计 方法 只能适应简单场景,难以满足不同的空间功能需求的技术问题。 为了实现上述目的,本发明提供了一种数字化室内设计方法,室内空间为 一个或 多个单一空间的组合,对于每个单一空间,采用以下步骤: S1、沿单一空间边界建立轴线系统,将三维空间数据用轴线进行标记定位; S2、利用启发式算法,依次布置当前布局方案的功能模块,对于功能模 块的每个 可能相对位置建立待处理方案,所述待处理方案将单一空间划分为 数个功能子区域,对待 处理方案进行评价,选择待处理方案中区域期望值最 大的布局方案迭代布置下一个功能 模块,直至有至少一个布局方案中的所 有功能模块布置完毕并且已完成方案优于待处理 方案,选取评价值最优的 布局方案为最佳区域布局方案; S3、利用启发式算法,依次布置每个功能子区域中每个组件类别组合中 的组件类 别的若干组件,更新未布置的组件类别的期望尺寸,直至布置生 成组件布局方案,迭代并 选取评价值最高的组件布局方案,作为最佳组件布 局方案; S4、输出完整的室内设计方案。 在一实施例中,所述步骤S1,进一步包括:将单一空间的平面轮廓线段 按设定顺 序依次标记为首尾相连的轴线。 9 CN 111597616 A 说 明 书 2/29 页 在一实施例中,所述步骤S2,进一步包括以下步骤: S21、建立包含若干个待处理的功能模块的初始方案作为当前布局方案, 初始化 区域得分阈值; S22、依次选取当前布局方案中的功能模块,按照功能模块的属性要求, 对功能模 块在空间中的位置进行筛选得到若干个预备子区域; S23、依次判断所有的预备子区域与其它已完成功能模块的功能子区域 是否相 交,如果相交,则进入步骤S24,如果不相交,则进入步骤S25,直 至所有预备子区域判断完 毕,进入步骤S26; S24、判断预备子区域是否有足够的空间放置当前功能模块,如果存在 足够的空 间,则与相交的其他已完成功能模块的功能子区域形成若干不同 相对位置关系的待分类 布局方案,如果不存在足够的空间,则放弃当前预 备子区域,进入步骤S23判断下一个的预 备子区域; S25、该预备子区域作为当前功能模块的功能子区域,生成相应的待分 类布局方 案,进入步骤S23判断下一个的预备子区域; S26、依次对每个待分类布局方案进行分类,如果该待分类布局方案存 在其它未 处理的功能模块,则将其加入待处理方案集合,计算该布局方案 的区域期望值; 如果该待分类布局方案不存在其它未处理的功能模块,则将其加入已 完成方案 集合,计算该布局方案的评价值,更新区域得分阈值; S27、当所有待处理方案的区域期望值均低于区域得分阈值,进入步骤 S28,否则 选择待处理方案中区域期望值最高的待处理方案作为当前布局方案, 进入步骤S22; S28、从已完成方案中选取评价值最高的布局方案作为最佳区域布局方 案。 在一实施例中,所述步骤S22进一步包括,在选取当前布局方案中的功能 模块之 后,增加一个不布置当前功能模块的待分类布局方案。 在一实施例中,所述步骤S21之前,进一步包括:所述步骤S21之前,进 一步包括: 寻找单一空间内连接所有出入口的最短路径树,所述路径树将单一 空间分割成若干区域, 根据主要的功能模块的要求寻找最匹配的路径分割区域, 作为附加约束条件加入功能模 块的属性要求,形成先验区域布局方案,计算得 到初始化的区域得分阈值,指导功能模块 的布局。 在一实施例中,所述寻找最匹配的路径分割区域,进一步包括以下步骤: 按预设顺序根据空间出入口的中点,将单一空间边缘轮廓线分段形成 数个外轮 廓线分段线,建立外轮廓线分段线集合; 采用克鲁斯卡算法及寻路算法得到单一空间内连接所有空间出入口的 最短路径 树,以最短路径树为地图,按预设顺序以相邻的空间出入口线段 中点为始末点,利用寻路 算法建立内部路径多线段集合; 依次将外轮廓线分段线集合的外轮廓线分段线和内部路径多线段集合 的内部路 径多线段配对组合,形成路径分割区域; 将主要的功能模块按照其布局尺寸要求,依次与路径分割区域的的平面几 何信 息的特征比较,找出当前最符合自身要求的路径分割区域,所述路径分割 区域作为附加约 束条件加入功能模块的属性要求,主要功能模块在空间中的位 置需布置在路径分割区域 10 CN 111597616 A 说 明 书 3/29 页 之内。 在一实施例中,所述采用克鲁斯卡算法及寻路算法得到单一空间内连接 所有空 间出入口的最短路径树,进一步包括以下步骤: 以空间出入口的中点作为顶点建立完全图; 计算完全图边集数组中每条边的权值; 从完全图的边集数组中的边按照权值从小到大排列; 从权值最小的边开始,将边的两个顶点连接起来,如果选择的边使得 最小生成树 出现了环路,则放弃该边; 重复上述步骤,直到所有的顶点都被连接在一起并且没有环路,形成 最小生成 树; 按照最小生成树中连接顶点的顺序,在空间内采用寻路算法得到最短 路径树。 在一实施例中,所述步骤S22中,根据功能模块的属性要求,对功能模 块在空间中 的位置进行筛选,筛选条件进一步包括:判断该位置对应轴线 上的背靠的建筑构件类型是 否满足设定要求。 在一实施例中,所述区域期望值,通过以下步骤进行计算: 计算第j个已完成功能模块的评价值function_valuej: 计算第k个待处理功能模块的最大期望值exp_valuek: exp_valuek=function_weightk; 计算区域期望值room_exp_value: 其中,j∈[0,m],k∈[0,n],m为已完成的功能模块数量,n为剩余 待处理的功能模 块数量,weighti为第j个已完成功能模块的第i个评价标 准的权重,valuei为第j个已完成 功能模块按照第i个评价标准得到的评价 值,v为第j个功能模块的评价标准总数, function_weightj为第j个已完成 功能模块的功能权重参数,function_weightk为第k个待 处理功能模块的功 能权重参数。 在一实施例中,所述功能模块的评价标准包括: 靠近参数评价标准valuec, valuec=1-(d10/d11)2; 远离参数评价标准valuec′, valuec′=1-valuec; 其中,d10为功能模块的功能子区域第一设定点与目标功能模块或目标建 筑构件 类型的距离,d11为当前功能模块子区域第一设定点到外轮廓多线段上 的第二设定点的距 离。 在一实施例中,所述功能模块的评价标准包括: 对位参数评价标准valueo, 11 CN 111597616 A 说 明 书 4/29 页 错位参数评价标准valueo′, valueo′=1-valueo; 其中,d20为功能模块对应的功能子区域在目标投影线段的投影长度, d21为功能 模块对应的功能子区域在目标投影线段所在直线上的投影长度, d22为目标被投影线段长 度。 在一实施例中,所述功能模块的评价标准包括: 长度参数评价标准valuel, 其中,d30为功能模块对应的功能子区域的实际长度,d31为功能模块对 应的功能 子区域的期望长度; 存在参数评价标准,如果功能模块存在,则评价值为1,如果功能模块不 存在,则 评价值为0。 在一实施例中,所述步骤S26中,所述更新区域得分阈值,进一步包括 以下步骤: 当前布局方案为已完成方案,如果其评价值乘以参数p大于等于当前 区域得分阈 值,则更新区域得分阈值,新的区域得分阈值等于当前布局方 案的评价值乘以参数p(0











