
技术摘要:
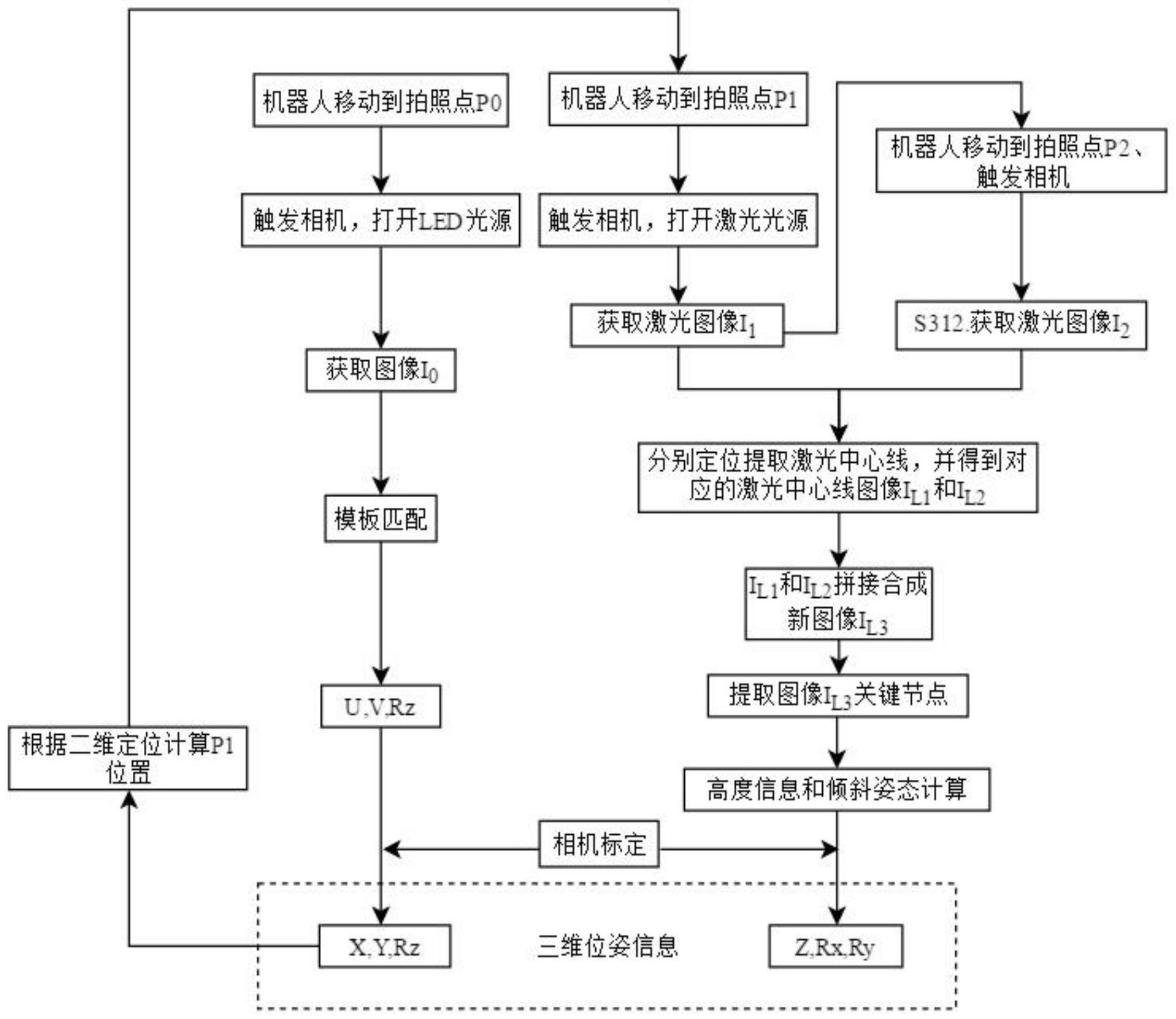
本发明提出了一种汽车发动机曲轴瓦盖的三维定位方法。本发明分为两个阶段以获取汽车发动机曲轴瓦盖的三维位姿信息。第一阶段,获取一幅瓦盖组完整出现在相机视野中的图像,并提取其二维定位信息(X,Y)和绕Z轴旋转的角度Rz。第二阶段,首先,在不同位置投射激光到第一片 全部
背景技术:
发动机作为汽车提供动力的装置,是汽车的高精密核心部件。其中,曲轴瓦盖是一 种铸铁材质的发动 机主要配件,五个一组,起着固定曲轴、保证发动机正常运转的重要作 用。在生产过程中,采用机器人代 替人工完成取料任务,即控制气缸夹爪移动到料框的对 应位置中夹取瓦盖准确摆放到指定位置,是实现自 动化取料装配的关键。 瓦盖在常规环境条件下不易形变,可以将其视为刚体。刚体在空间中有六个自由 度,即瓦盖组在空间 中的位姿信息由6个坐标:X,Y,Z,Rx,Ry,Rz确定。其中X,Y,Z两两互相 垂直,构成空间三维 坐标系,Rx,Ry,Rz分别代表瓦盖组绕X轴、Y轴和Z轴旋转的角度。瓦盖 成组的放在料框中,上料前 装满瓦盖的料框放置在工作台。机器人需要从初始位置移动到 工作台抓取瓦盖。相应地,机器人要实现瓦 盖的取料任务,必须根据传感器获取的信息得 到瓦盖在世界坐标系中的上述6个位姿信息,从而移动一定 距离的机器人和调整机器人的 当前姿态来完成瓦盖的抓取和摆放。 由于瓦盖组在料框中多层堆叠,层与层之间由塑料托盘隔开。受托盘所用材质、料 框放置的情况、托 盘的平整性等现场环境因素的影响,料框中待抓取的瓦盖组与取料机器 人之间的高度Z实际上是变化的, 存在一定的柔性偏差。特别是,当料框的放置本身略有倾 斜或者托盘不平整时,该高度的偏差将更大,此 时瓦盖组相对水平方向有一定的倾斜、垂 直方向上出现俯仰,导致姿态信息中的Rx、Ry发生变化。在此 情况下,传统的固定高度结合 二维视觉引导的方法可能会出现机器人夹爪与瓦盖组的接触面有限,无法抓 紧瓦盖组;严 重地会导致机器人夹爪在向抓取位置移动的过程中发生碰撞,从而损坏机械结构和工件。 因 此,如何确定瓦盖组在空间中的位姿信息成为实现发动机曲轴瓦盖自动取料、装配继续 解决的关键难题。
技术实现要素:
针对上述问题,本发明提出一种汽车发动机曲轴瓦盖的三维定位方法,该方法能 高速准确地获取瓦盖 组在空间中的位姿信息,实现机器人快速、精准地抓取瓦盖,并将瓦 盖摆放到指定位置。本











