
技术摘要:
本发明公开了一种自动电焊机的摆动器,包括:底座,以及设置在所述底座上方的滑轨,且滑轨与底座焊接连接,所述滑轨包括固定座和限位滑块,所述限位滑块设置于固定座顶端,所述限位滑块设置有两个;直线驱动机构,其设置在所述滑轨的一侧;多角度摆动机构,其设置在所 全部
背景技术:
随着管道预制工厂化发展与实施的深入,对自动化焊接设备性能的需求也越来越 全面,尤其是二氧化碳气体保护自动焊。自动焊接机在焊接过程中为满足焊缝宽度,需要将 电弧宽度变宽使焊接焊道变宽,会将焊接枪与摆动器进行连接,实现焊接枪在焊接过程中 的摆动。通过摆动器的设置代替了手工拿取焊接机,可避免工人遭受焊接时产生的飞溅烫 伤的情况,进而提高了工人操作的安全性,同时通过机器取代人工,其工作效率更高。 现有的自动电焊机的摆动器结构简单只能进行直线往复运动,在操作过程中,容 易导致焊缝质量不高,外观常有缺陷。
技术实现要素:
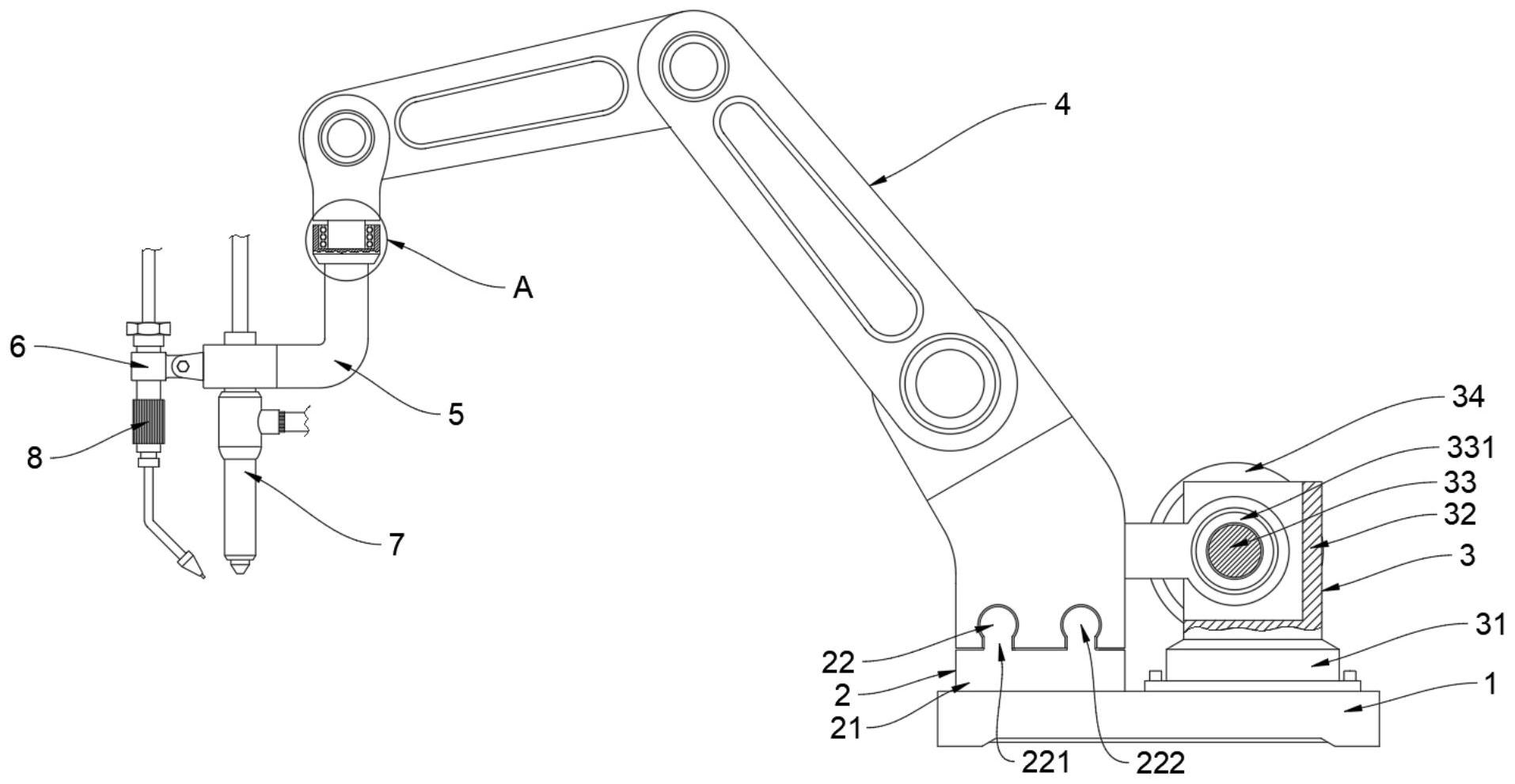
本发明的一个目的是解决至少上述问题,并提供至少后面将说明的优点。 本发明还有一个目的是提供自动电焊机的摆动器,实现了摆动器调节焊接枪灵活 性,使层、道外观圆滑过渡,熔合良好无未熔合与夹渣形成,解决了焊缝质量不高,外观常有 缺陷的问题。 为实现上述目的和一些其他的目的,本发明采用如下技术方案: 一种自动电焊机的摆动器,包括: 底座,以及设置在所述底座上方的滑轨,且滑轨与底座焊接连接,所述滑轨包括固 定座和限位滑块,所述限位滑块设置于固定座顶端,所述限位滑块设置有两个,且两个限位 滑块与固定座为一体成型结构; 直线驱动机构,其设置在所述滑轨的一侧,且直线驱动机构包括安装座、安装架、 丝杆和驱动电机; 多角度摆动机构,其设置在所述滑轨的上方,且多角度摆动机构包括连接座、连接 套筒、连接板、第一连接臂、第二连接臂、第三连接臂、固定轴承和定位销,所述连接座底端 的内部设置有限位滑槽,且限位滑槽设置有两个,所述两个限位滑块延伸至限位滑槽的内 部,并与限位滑槽间隙连接; 固定架,以及设置在固定架一侧的固定片,所述固定架设置在所述第三连接臂的 下方,所述固定架包括支撑杆和夹紧机构,所述夹紧机构的内侧安装有送丝机机头,所述固 定片的内侧安装有焊接枪。 优选的是,所述安装架设置于安装座的上方,并与安装座为一体成型结构,所述丝 杆设置于安装架的内侧,且丝杆与安装架通过轴承连接,所述驱动电机设置于安装架的后 方,并与安装架通过法兰连接,且驱动电机的输出端与丝杆的一端通过联轴器传动连接,所 述丝杆外部安装有滚珠螺母。 优选的是,所述连接套筒设置于连接座的一侧,并与连接座为一体成型结构,且连 4 CN 111590168 A 说 明 书 2/5 页 接套筒的一端套设在滚珠螺母,与滚珠螺母固定连接,所述连接板设置于连接座的顶部,并 与连接座为一体成型结构,所述第一连接臂设置于连接板远离连接座一端的两侧,所述第 二连接臂设置于第一连接臂远离连接板一端的之间,所述第二连接臂远离第一连接臂一端 的两侧与第三连接臂固定连接,所述第一连接臂和第二连接臂两端的内部以及第三连接臂 靠近第二连接臂一端的内部均安装有固定轴承,且相邻固定轴承之间通过定位销连接。 优选的是,两个所述第三连接臂之间的底部设置有固定板,所述固定板的底部设 置有连接轴,所述第三连接臂和连接轴与固定板均为一体成型结构。 优选的是,所述夹紧机构设置于支撑杆远离第三连接臂的一端,所述支撑杆的顶 部设置有固定套,且连接轴的一端延伸至固定套的内部,并与固定套通过轴承连接,所述固 定套与支撑杆为一体结构,夹紧机构包括第一夹紧板和第二夹紧板,所述第二夹紧板设置 于第一夹紧板远离支撑杆的一侧,并第一夹紧板构成一个圆形结构。 优选的是,所述第一夹紧板和第二夹紧板相邻位置处的两端均设置固定片,所述 第一夹紧板和第二夹紧板的内侧均设置有凸起,且凸起设置若干个,所述第二夹紧板远离 第一夹紧板的一侧设置有固定夹片,且固定片的两端延伸至固定夹片的内部,并与固定片 通过螺栓连接,所述凸起和固定片与第一夹紧板和第二夹紧板均为一体成型结构。 优选的是,所述支撑杆设置为“L”字型结构。 优选的是,所述限位滑块包括矩形板和圆形板,且圆形板位于矩形板的顶端,并与 矩形板为一体成型结构,所述限位滑槽与限位滑块的形状相匹配。 优选的是,相邻所述固定片通过螺栓连接。 本发明至少包括以下有益效果: 1、本发明通过将焊接枪和送丝机机头固定在多角度摆动机构的一端,多角度摆动 机构主要由连接座、连接套筒、连接板、第一连接臂、第二连接臂、第三连接臂、固定轴承和 定位销组成,连接板、第一连接臂、第二连接臂和第三连接臂之间的连接处通过固定轴承和 定位销的配合进行连接,使得连接处可灵活转动,使得三个连接臂可自由弯折调节角度,同 时固定焊接枪和送丝机机固定架与第三连接臂之间通过连接轴和固定套的轴承连接实现 固定,使得连接处可自由旋转,通过旋转进一步调节焊接枪和送丝机机的朝向角度,整体形 成一个类于人手臂的结构,完全模拟手工焊接操作的动作,增加焊接枪角度多变性;多角度 摆动机构通过限位滑槽与限位滑块配合实现与滑轨的连接,通过连接套筒与丝杆上滚珠螺 母的固定实现与直线驱动机构的连接,滑轨为多角度摆动机构提供支撑的同时便于多角度 摆动机构的移动,驱动电机的输出端带动丝杆旋转,丝杆上的滚珠螺母将旋转运动转化为 直线运动,进而实现多角度摆动机构的直线运动,又增加了调节方式,增加了焊接枪角度多 变性,能使层、道外观过渡更圆滑,熔合良好且无未熔合与夹渣形成,解决了焊缝质量不高, 外观常有缺陷的问题。 2、本发明通过送丝机机头放置在第一夹紧板和第二夹紧板内侧,且第一夹紧板和 第二夹紧板两端的通过螺栓锁紧,实现对送丝机机头固定,固定片紧包于焊接枪的外部,其 两端通过螺栓锁紧并与固定夹片连接,实现焊接枪的固定。此两种固定方式简单,便于拆 装。 3、本发明通过第一夹紧板和第二夹紧板的内侧设置若干个依次分布的凸起,通过 凸起可增加与送丝机机头的接触点,进而增大了接触应力,提高了固定的牢固性和稳定性。 5 CN 111590168 A 说 明 书 3/5 页 附图说明 图1是本发明提供的自动电焊机的结构示意图; 图2是本发明提供的多角度摆动机构的立体结构示意图; 图3是本发明提供的固定架和固定片连接关系的俯视图; 图4是本发明提供的底座、滑轨以及直线驱动机构的俯视图; 图5是本发明提供的A区的局部放大图。











