
技术摘要:
本发明基于光场EPI傅里叶变换的折射特征检测方法,具体按照以下步骤实施:步骤1、对光场原始图像进行解码得到四维参数化矩阵L[s,t,u,v];步骤2、利用四维参数化矩阵L[s,t,u,v]提取得到多个子孔径图像,并将所有的子孔径图像处理得到多个光场水平EPI图像;步骤3、 全部
背景技术:
光场成像技术可以记录4D空间中光线的位置信息和方向信息,研究人员提出光线 与两个平行双平面的交点来参数化表示光场,则一条光线可用L(s,t,u,v)唯一确定,L为光 线强度,(s,t)和(u,v)分别表示光线与双平面的交点坐标,(s,t)代表光线位置信息,(u,v) 代表光线方向信息。目前,研究人员采用机器人视觉方法对光场图像中的光线特征进行观 察检测,而现有的机器人视觉方法大多遵循朗伯假设,即认为空间中一点所反射的光线遵 循漫反射原则。例如,CHris Harris和Mike Stephens提出了Harris角点检测方法,由于 Harris角点检测方法不能区分不同比例的兴趣点,David Lowe提出了SIFT特征检测方法, 由于SIFT特征检测方法计算成本较高,Rosten提出了FAST特征检测方法。但是由于自然界 存在大量非朗伯表面,如镜面表面、折射表面、起偏表面等,这些非朗伯表面的检测给现有 的机器人视觉方法带来了较大挑战,其中折射物体表面具有透明特性,光场图像中的折射 区域常存在背景纹理的非线性变化,这与朗伯表面区域的变化属性存在较大差异。以上列 举的现有图像特征检测方法均针对朗伯表面特征的检测与提取,无法满足对折射区域特征 的检测、描述要求。 随着光场成像理论发展,对光场图像的独有特征进行检测受到了学界的广泛关 注。由于光场相机拍摄的数据包含有场景目标不同角度的信息,研究人员提出采用光场EPI 图像(epipolar plane image)来描述和检测光线折射特征的新思路。例如Ghasemi提出了 一种使用改进的Hough变换来检测EPI图像内坡度变化的方法,该方法可用于检测场景内折 射特征是否存在,但对于折射区域的定位精度不高。Texeira提出在光场所有子视图中检测 SIFT特征并将其投影到相应的EPI图像中,最终在EPI图像中检测投影结果是否满足直线分 布特性来判断该区域是否存在折射。Maeno提出将光线穿过中心视图与其他视图的相对差 的集合表示为光场失真特征(LFD)。Xu使用LFD作为非朗伯表面图像分割的基础,并提出在 4D空间中,对各子图像特征进行奇异值分解(SVD)可得到特征分布4D超平面的法线,进而利 用最小的奇异值用作最佳拟合超平面的误差度量,此时,折射表面由于特征分布与朗伯表 面存在差异,因此其特征分布超平面拟合的最小奇异值具有可区分性。Xu提出的方法虽然 相比Ghasemi、Texeira、Maeno的方法可获得准确率较高的折射区域检测结果,但是其方法 复杂度较高,且奇异值分解过程易受到外点的影响,导致折射特征的检测精度并不十分理 想。因此,寻找一种计算复杂度低,能够精确检测出折射特征的方法势在必行。
技术实现要素:
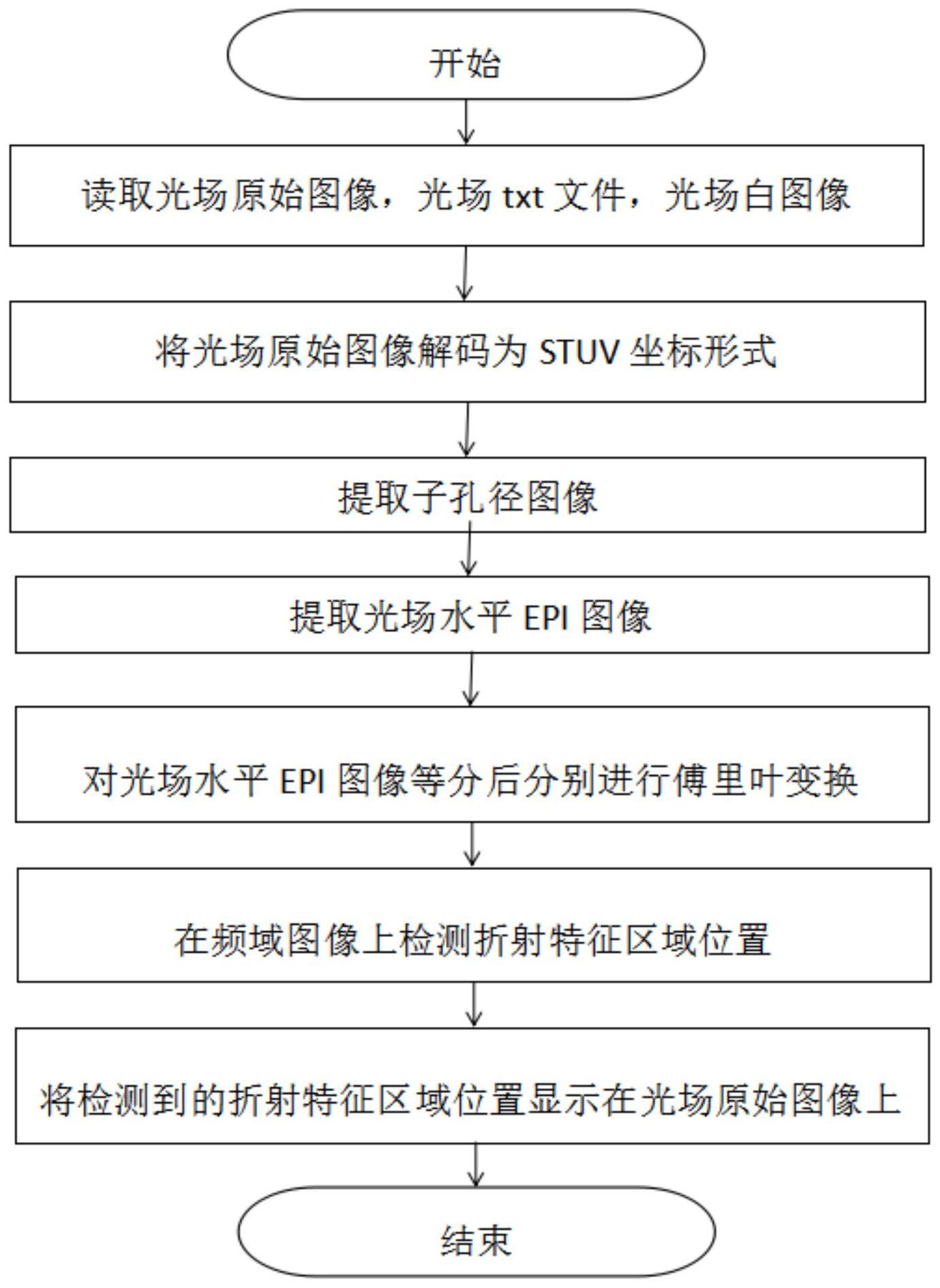
本发明的目的是提供基于光场EPI傅里叶变换的折射特征检测方法,能够精确检 测出折射特征。 5 CN 111583191 A 说 明 书 2/7 页 本发明所采用的技术方案是:基于光场EPI傅里叶变换的折射特征检测方法,具体 按照以下步骤实施: 步骤1、对光场原始图像进行解码得到四维参数化矩阵L[s,t,u,v]; 步骤2、利用四维参数化矩阵L[s,t,u,v]提取得到多个子孔径图像,并将所有的子 孔径图像处理得到多个光场水平EPI图像; 步骤3、将每个光场水平EPI图像划分为多等份图像,对每等份图像依次进行傅里 叶变换、频谱中心化操作得到每等份图像对应的频域图像; 步骤4、对每个光场水平EPI图像对应的所有等份频域图像依次进行检测分析确定 频域图像上是否存在折射特征,进而确定光场原始图像上的折射区域。 本发明的特点还在于, 步骤1具体操作如下: 步骤1.1、将光场原始图像以及光场原始图像对应的txt文件、白图像分别输入至 MATLAB软件中进行读取,并利用im2double函数将txt文件进行double操作转化为双精度型 浮点数据,双精度型浮点数据包含微透镜阵列的旋转角数据rot_angle、水平间隔和垂直间 隔数据[lens.x,lens.y]以及每个微透镜的高度数据height、宽度数据width、中心点坐标 数据[center.x,center.y]; 步骤1.2、利用imrotate函数将光场原始图像、白图像分别以微透镜阵列的旋转角 rot_angle进行旋转从而对光场原始图像、白图像中的每个微透镜中心进行定位; 步骤1.3、利用微透镜阵列的水平间隔和垂直间隔数据[lens.x,lens.y]计算得到 光场原始图像的方向信息数据[u,v],具体操作如式(1)所示: 其中,ceil为取整函数; 步骤1.4、利用微透镜阵列中每个微透镜的高度数据height对光场原始图像中每 个微透镜的垂直方向数据s进行赋值,利用微透镜阵列中每个微透镜的宽度数据width对光 场原始图像中每个微透镜的水平方向数据t进行赋值,得到光场原始图像的位置信息数据 [s,t]; 步骤1.5、以光场原始图像的方向信息数据的u为高度,v为宽度建立光场原始图像 的UV平面,以光场原始图像的位置信息数据的s为高度,t为宽度建立光场原始图像的ST平 面,以光线与UV平面和ST平面的交点参数化表示光场,在光场中计算UV平面的中心点坐标, 并利用for循环遍历微透镜阵列中的每个微透镜,计算得到每个微透镜中心对应在光场原 始图像上的宏像素坐标,再嵌套for循环计算在光场原始图像上每个宏像素在水平和垂直 方向相对于UV平面中心点坐标的偏移量,再利用宏像素坐标和对应的偏移量求和从而得到 光场原始图像上每个像素的坐标,并将每个像素的坐标通过r、g、b三个通道输出,得到四维 参数化矩阵L[s,t,u,v]。 步骤1.5具体操作如下: 步骤1.5.1、计算得到UV平面的中心点坐标,具体操作如式(2)所示: 6 CN 111583191 A 说 明 书 3/7 页 其中,floor为取整函数; 步骤1.5.2、计算得到每个微透镜中心对应在光场原始图像上的宏像素坐标,具体 操作如式(3)所示: 其中,round为取整函数; 步骤1.5.3、计算在光场原始图像上每个宏像素在水平和垂直方向相对于UV平面 中心点坐标的偏移量,具体操作如式(4)所示: 步骤1.5.4、计算得到光场原始图像上每个像素的坐标,具体操作如式(5)所示: 步骤2具体操作如下: 步骤2.1、利用for循环遍历四维参数化矩阵L[s,t,u,v]中的[u,v]数据,并用 squeeze函数提取每一对(u,v)角度的图像,得到有序排列的多个子孔径图像; 步骤2.2、利用squeeze函数提取每个子孔径图像的水平方向像素坐标,再将提取 得到的像素坐标按照多个子孔径图像的排列顺序进行堆叠,得到多个光场水平EPI图像。 步骤3具体操作为:利用imcrop函数将每个光场水平EPI图像划分为多等份图像, 利用rgb2gray函数对每等份图像进行灰度化处理得到对应的灰度图像和灰度矩阵,利用 im2double函数依次将每等份图像对应的灰度图像进行double处理,再先利用fft2函数将 double处理后的灰度图像先进行傅里叶变换,后利用fftshift函数进行频谱中心化操作, 最后使用abs函数对频谱中心化操作后的图像进行取模操作从而得到每等份图像对应的频 域图像。 步骤4具体操作为: 步骤4.1、针对一个光场水平EPI图像而言,将其对应的其中一等份频域图像记为 img,将该等份频域图像的水平分辨率记为水平宽度x,垂直分辨率记为垂直高度y,通过 imcrop(img,[0,0,x,y/2])操作截取该等份频域图像上半部分,记为图像A; 步骤4.2、对图像A依次进行imcrop(A,[0,0,x/2,y/2])操作、imcrop(A,[x/2,0,x/ 2,y/2])操作以将图像A分为左右两等份,再使用sum函数分别统计两等份图像各自的灰度 值总和,选择灰度值总和最大的图像记为图像B; 步骤4.3、将图像B的水平分辨率记为水平宽度M,垂直分辨率记为垂直高度N,取图 像B的灰度矩阵中位于M/3、M/2、2M/3处的三列像素,利用diff函数分别计算这三列像素中 每一列上相邻两个像素灰度值的差值,再通过abs函数将计算得到的差值绝对值化; 步骤4.4、观察计算得到的每一列上相邻两个像素灰度值的差值绝对值,若三列像 素上的所有差值绝对值均不大于1,则判断该图像B所在的等份频域图像对应的光场水平 EPI图像存在非线性特征线条,该光场水平EPI图像在光场原始图像中对应的区域存在折射 特征,否则判断该光场水平EPI图像在光场原始图像中对应的区域不存在折射特征; 7 CN 111583191 A 说 明 书 4/7 页 步骤4.5、若经步骤4.4确定光场原始图像中对应的区域存在折射特征,则对该等 份频域图像重复进行步骤4.1至步骤4.4,若像素上的所有差值绝对值仍然均不大于1,则确 定光场原始图像上存在折射特征的区域为稳定区域; 步骤4.6、若步骤4.4确定光场原始图像中对应的区域不存在折射特征,则对这个 光场水平EPI图像的其它等份频域图像依次重复步骤4.1至步骤4.5,直至找到这个光场水 平EPI图像在光场原始图像中存在折射特征的所有稳定区域,并将稳定区域显示在光场原 始图像上; 步骤4.7、类似地,重复步骤4.1至步骤4.6,得到其他光场水平EPI图像在光场原始 图像中存在折射特征的所有稳定区域,并将稳定区域显示在光场原始图像上,至此得到光 场原始图像上的全部折射特征。 本发明基于光场EPI傅里叶变换的折射特征检测方法的有益效果是:本发明通过 对光场水平EPI图像分段进行傅里叶变换,将普通2D空域图像转变为频谱中心化的频域图 像,由于光场EPI图像上折射区域在空域不具有直线分布特性,因此其在频域的能量分布与 非折射区域具有明显方向性存在明显差异,本发明利用这种折射区域图像与非折射区域图 像在频域能量分布的差异以实现准确的折射特征检测,大大提高了对光场折射区域的检测 精度,同时由于采用频域计算方法,本发明的计算复杂度明显低于现有空域的对应算法。 附图说明 图1是本发明基于光场EPI傅里叶变换的折射特征检测方法的流程图; 图2是本发明基于光场EPI傅里叶变换的折射特征检测方法中对一等份频域图像 的检测步骤流程图; 图3是本发明基于光场EPI傅里叶变换的折射特征检测方法中对多等份频域图像 之间的检测步骤流程图; 图4是本发明基于光场EPI傅里叶变换的折射特征检测方法中实施例待检测的光 场原始图像; 图5是图4光场原始图像的白图像。











