
技术摘要:
本发明公开了一种基于无人机的区域人数统计方法、介质、设备及系统,其中方法包括:根据无人机参数和人员拍摄参数计算无人机的最大悬停高度;根据待统计区域信息和拍摄重叠区域信息计算最小无人机架数,以确定控制参数可调整范围;获取控制参数,并根据控制参数和待统 全部
背景技术:
人数统计是大型商场、购物中心、机场、车站等公共场所在管理和决策方面不可缺 少的数据。利用人数统计信息可以合理调度人力物力,把控好人员数量的变化,做防范措 施,及时应对人员过密情况,防止踩踏事件发生,保障人员的安全及社会生活的安定有序。 相关技术中,在进行人数统计的过程中,多采用固定的图像采集设备或者带有滑 动装置的摄像头对固定入口进行图像采集,进而对进入固定入口的人数进行统计;然而,对 于广场、操场等开放性场所,由于没有固定的入口,使得现有的方法难以对这些开放性场所 的人数进行有效的统计。
技术实现要素:
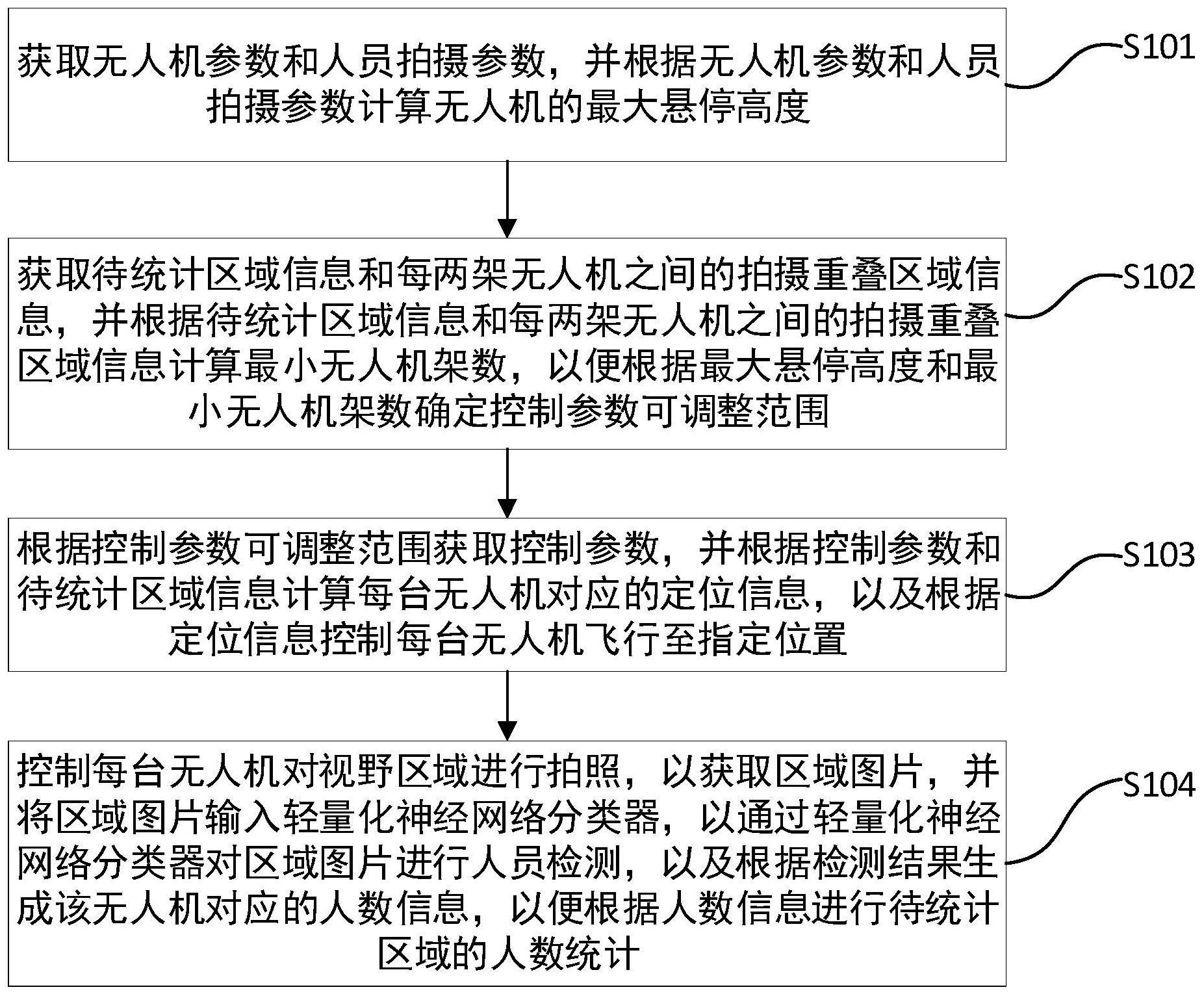
本发明旨在至少在一定程度上解决上述技术中的技术问题之一。为此,本发明的 一个目的在于提出一种基于无人机的区域人数统计方法,能够自动对开放场所的人数进行 有效统计,进而对开放场所的人员数量实时把控,防止踩踏事件的发生,保障开放场所人员 安全。 本发明的第二个目的在于提出一种计算机可读存储介质。 本发明的第三个目的在于提出一种计算机设备。 本发明的第四个目的在于提出一种基于无人机的区域人数统计系统。 为达到上述目的,本发明第一方面实施例提出了一种基于无人机的区域人数统计 方法,包括以下步骤:获取无人机参数和人员拍摄参数,并根据所述无人机参数和所述人员 拍摄参数计算无人机的最大悬停高度;获取待统计区域信息和每两架无人机之间的拍摄重 叠区域信息,并根据所述待统计区域信息和所述每两架无人机之间的拍摄重叠区域信息计 算最小无人机架数,以便根据所述最大悬停高度和所述最小无人机架数确定控制参数可调 整范围;根据所述控制参数可调整范围获取控制参数,并根据所述控制参数和所述待统计 区域信息计算每台无人机对应的定位信息,以及根据所述定位信息控制每台无人机飞行至 指定位置;控制每台无人机对视野区域进行拍照,以获取区域图片,并将所述区域图片输入 轻量化神经网络分类器,以通过所述轻量化神经网络分类器对所述区域图片进行人员检 测,以及根据检测结果生成该无人机对应的人数信息,以便根据所述人数信息进行待统计 区域的人数统计。 根据本发明实施例的基于无人机的区域人数统计方法,首先,获取无人机参数和 人员拍摄参数,并根据无人机参数和人员拍摄参数计算无人机的最大悬停高度;接着,获取 待统计区域信息和每两架无人机之间的拍摄重叠区域信息,并根据待统计区域信息和每两 架无人机之间的拍摄重叠区域信息计算最小无人机架数,以便根据最大悬停高度和最小无 4 CN 111553904 A 说 明 书 2/10 页 人机架数确定控制参数可调整范围;然后,根据控制参数可调整范围获取控制参数,并根据 控制参数和待统计区域信息计算每台无人机对应的定位信息,以及根据定位信息控制每台 无人机飞行至指定位置;接着,控制每台无人机对视野区域进行拍照,以获取区域图片,并 将区域图片输入轻量化神经网络分类器,以通过轻量化神经网络分类器对区域图片进行人 员检测,以及根据检测结果生成该无人机对应的人数信息,以便根据人数信息进行待统计 区域的人数统计;从而实现自动对开放场所的人数进行有效统计,进而对开放场所的人员 数量实时把控,防止踩踏事件的发生,保障开放场所人员安全。 另外,根据本发明上述实施例提出的基于无人机的区域人数统计方法还可以具有 如下附加的技术特征: 可选地,还包括:根据所有无人机对应的区域图片生成所述待统计区域的全景图 片,并将所述全景图片输入重量级端到端卷积网络,以便所述重量级端到端卷积网络根据 所述全景图片对待统计区域人数进行精确统计。 可选地,在将所述区域图片输入轻量化神经网络分类器之前,还包括:获取该无人 机的相邻无人机对应的区域图片,并根据所述相邻无人机对应的区域图片对该无人机对应 的区域图片进行标注,其中,所述标注包括视野重叠区域标注、视野无重叠区域标注,以便 所述轻量化神经网络分类器根据标注后的该无人机对应的区域图片生成视野区域人数值、 视野重叠区域人数值和视野无重叠区域人数值。 可选地,还包括:判断所述视野区域人数值是否大于预设的人数阈值;如果所述视 野区域人数值大于预设的人数阈值,则生成报警信息,并将所述报警信息推送给相关人员, 以便所述相关人员对报警信息进行处置。 可选地,所述最大悬停高度根据以下公式计算: 其中,hmax表示最大悬停高度,a*表示所述区域图片的分辨率,e1*e2表示人员对应 的分辨率,Sman表示人员对应的占地面积,λ表示成像比例,β表示摄像机视角。 可选地,所述最小无人机架数根据以下公式计算: 其中,Nummin表示最小无人机架数,M和N分别表示待统计区域的长度和宽度,d1表 示相邻两架无人机之间视野重叠区域的长边值,d2表示相邻两架无人机之间视野重叠区域 的宽边值,λ表示成像比例,k表示实际地面边长与对应的区域图片边长之间的比值。 为达到上述目的,本发明第二方面实施例提出了一种计算机可读存储介质,其上 存储有基于无人机的区域人数统计程序,该基于无人机的区域人数统计程序被处理器执行 时实现如上述的基于无人机的区域人数统计方法。 根据本发明实施例的计算机可读存储介质,通过存储基于无人机的区域人数统计 程序,以使得处理器在执行该基于无人机的区域人数统计程序时,实现如上述的基于无人 机的区域人数统计方法,从而实现自动对开放场所的人数进行有效统计,进而对开放场所 5 CN 111553904 A 说 明 书 3/10 页 的人员数量实时把控,防止踩踏事件的发生,保障开放场所人员安全。 为达到上述目的,本发明第三方面实施例提出了一种计算机设备,包括存储器、处 理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时, 实现如上述的基于无人机的区域人数统计方法。 根据本发明实施例的计算机设备,通过存储器对基于无人机的区域人数统计程序 进行存储,以使得处理器在执行该基于无人机的区域人数统计程序时,实现如上述的基于 无人机的区域人数统计方法,从而实现自动对开放场所的人数进行有效统计,进而对开放 场所的人员数量实时把控,防止踩踏事件的发生,保障开放场所人员安全。 为达到上述目的,本发明第四方面实施例提出了一种基于无人机的区域人数统计 系统,包括:多个无人机和监控中心,其中:所述监控中心用于获取无人机参数和人员拍摄 参数,并根据所述无人机参数和所述人员拍摄参数计算无人机的最大悬停高度,以及获取 待统计区域信息和每两架无人机之间的拍摄重叠区域信息,并根据所述待统计区域信息和 所述每两架无人机之间的拍摄重叠区域信息计算最小无人机架数,以便根据所述最大悬停 高度和所述最小无人机架数确定控制参数可调整范围;所述监控中心还用于根据所述控制 参数可调整范围获取控制参数,并根据所述控制参数和所述待统计区域信息计算每台无人 机对应的定位信息,以及根据所述定位信息控制每台无人机飞行至指定位置;所述无人机 用于对视野区域进行拍照,以获取区域图片,并将所述区域图片输入轻量化神经网络分类 器,以通过所述轻量化神经网络分类器对所述区域图片进行人员检测,以及根据检测结果 生成该无人机对应的人数信息,以便根据所述人数信息进行待统计区域的人数统计。 根据本发明实施例的基于无人机的区域人数统计系统,通过设置监控中心用于获 取无人机参数和人员拍摄参数,并根据无人机参数和人员拍摄参数计算无人机的最大悬停 高度,以及获取待统计区域信息和每两架无人机之间的拍摄重叠区域信息,并根据待统计 区域信息和每两架无人机之间的拍摄重叠区域信息计算最小无人机架数,以便根据最大悬 停高度和最小无人机架数确定控制参数可调整范围;监控中心还用于根据控制参数可调整 范围获取控制参数,并根据控制参数和待统计区域信息计算每台无人机对应的定位信息, 以及根据定位信息控制每台无人机飞行至指定位置;无人机用于对视野区域进行拍照,以 获取区域图片,并将区域图片输入轻量化神经网络分类器,以通过轻量化神经网络分类器 对区域图片进行人员检测,以及根据检测结果生成该无人机对应的人数信息,以便根据人 数信息进行待统计区域的人数统计;从而实现自动对开放场所的人数进行有效统计,进而 对开放场所的人员数量实时把控,防止踩踏事件的发生,保障开放场所人员安全。 另外,根据本发明上述实施例提出的基于无人机的区域人数统计系统还可以具有 如下附加的技术特征: 可选地,所述监控中心还用于根据所有无人机对应的区域图片生成所述待统计区 域的全景图片,并将所述全景图片输入重量级端到端卷积网络,以便所述重量级端到端卷 积网络根据所述全景图片对待统计区域人数进行精确统计。 附图说明 图1为根据本发明实施例的基于无人机的区域人数统计方法的流程示意图; 图2为根据本发明实施例的无人机成像方式示意图; 6 CN 111553904 A 说 明 书 4/10 页 图3为根据本发明实施例的整体区域图片排布方式示意图; 图4为根据本发明另一实施例的基于无人机的区域人数统计方法的流程示意图; 图5为根据本发明实施例的基于无人机的区域人数统计系统的结构示意图。











