
技术摘要:
本发明提供一种列车车轮自动探伤机器人系统及其自动停车方法。该自动停车方法包括:控制机构控制检测小车沿行走小轨滑动;所述停放检测件能够识别到待检测车轮时,所述停放检测件输出第一检测信号,并反馈给所述控制机构;当所述停放检测件未识别到所述待检测车轮时, 全部
背景技术:
目前,动车轮对探伤设备自动对正轮对方法如下为:轮对停放在钢轨上固定不动, 探伤设备沿基坑底部铺设小轨上行走,在探伤设备一侧轮辋探头架中间放置一个开关量激 光传感器,其工作原理是激光输出的有效光斑在没有遇到障碍物时,保持目前电平状态,一 旦遇到障碍物输出电平状态发生改变。针对探伤设备而言,行走过程中钢轨上没有轮对时, 激光传感器状态不会发生改变;当传感器光斑打到钢轨上轮对边缘时,此时轮对距离设备 中心还有一定距离,此时传感器电平发生变化,设备行走轮测速编码器开始计数,通过需要 探伤车轮直径大概算出探伤设备车轮转数和行走距离关系,控制设备从理论上行走该距 离,并反复调整探伤设备的位置,记录最终的车轮转数,保证探伤设备检测小车行走到该探 伤车轮正下方停止。下次探伤设备对正轮对会参考上一次的最终的车轮转数。 但是,若轮对直径相同的话,找轮位置准确,实际上列车不同位置的轮对直径不 同,相同位置的轮对磨损情况不同导致轮对直径也不同,这样造成传感器光斑打到车轮相 同高度边缘时,车轮中心距离传感器光斑位置不同,结果按照相同编码器数据控制设备行 走,因此设备肯定不能和车轮对中,影响检测准确性。
技术实现要素:
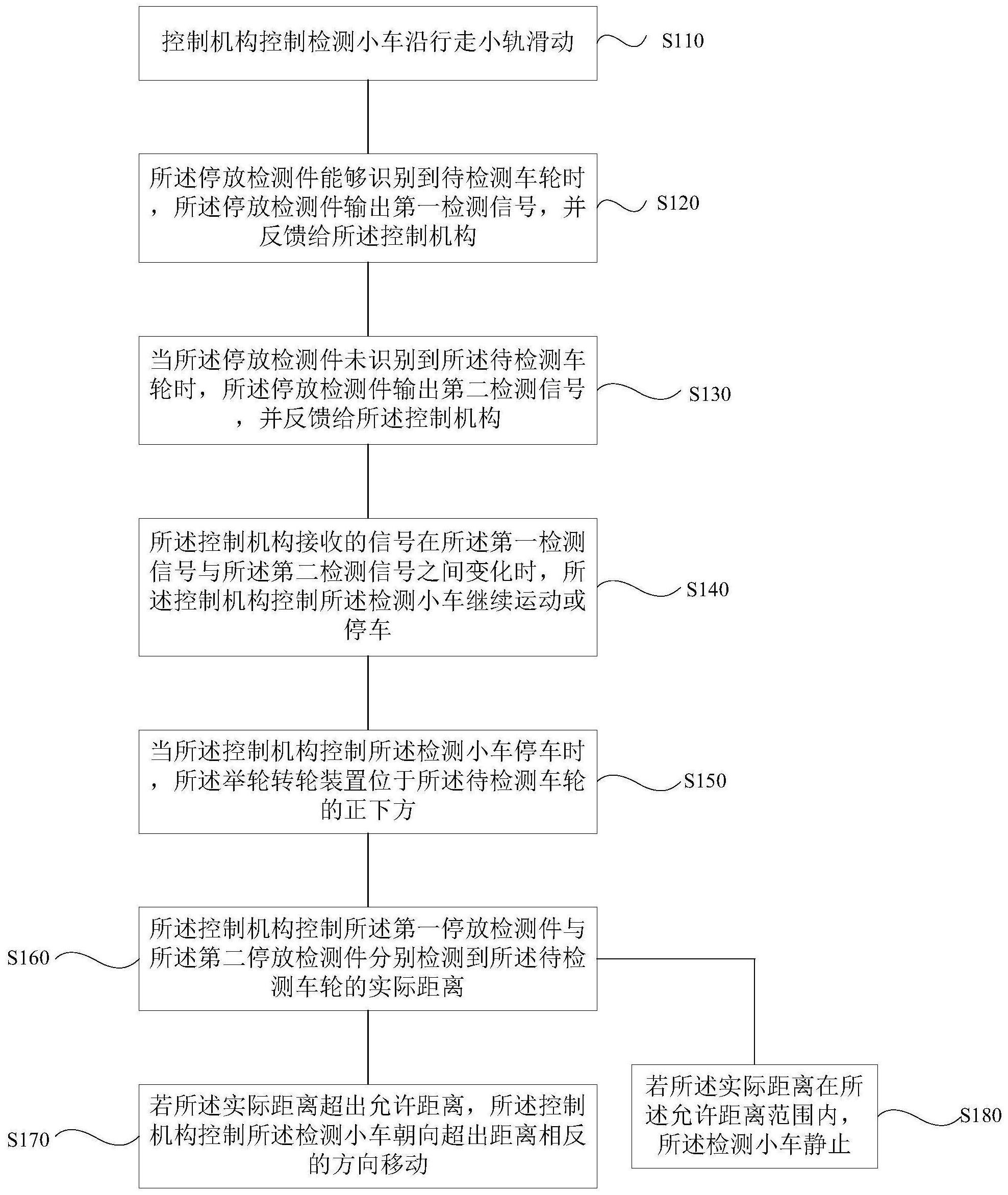
基于此,有必要针对目前通过编码器计数的方式计算停放位置导致的停车不准的 问题,提供一种能够准确停放于待检测车轮正下方的列车车轮自动探伤机器人系统及其自 动停车方法。 上述目的通过下述技术方案实现: 一种列车车轮自动探伤机器人系统的自动停车方法,应用于列车车轮自动探伤机 器人系统,所述列车车轮自动探伤机器人系统包括检测小车、设置于检测小车的举轮转轮 装置以及位于所述举轮转轮装置顶部并偏离所述举轮转轮装置中心的停放检测件,所述自 动停车方法包括: 控制机构控制检测小车沿行走小轨滑动; 所述停放检测件能够识别到待检测车轮时,所述停放检测件输出第一检测信号, 并反馈给所述控制机构; 当所述停放检测件未识别到所述待检测车轮时,所述停放检测件输出第二检测信 号,并反馈给所述控制机构; 所述控制机构接收的信号在所述第一检测信号与所述第二检测信号之间变化时, 所述控制机构控制所述检测小车继续运动或停车; 当所述控制机构控制所述检测小车停车时,所述举轮转轮装置位于所述待检测车 6 CN 111572591 A 说 明 书 2/18 页 轮的正下方。 在其中一个实施例中,所述控制机构接收的信号在所述第一检测信号与所述第二 检测信号之间变化的步骤包括: 所述控制机构控制检测小车沿行走小轨滑动,且所述停放检测件未识别所述待检 测车轮时,所述停放检测件输出第二检测信号; 所述停放检测件识别待检测车轮的边缘,所述停放检测件输出的信号由第二检测 信号跳变为第一检测信号,并反馈给所述控制机构; 所述控制机构控制所述检测小车继续沿所述行走小轨减速移动,且所述停放检测 件脱离所述待检测车轮之前,所述停放检测件输出所述第一检测信号; 当所述停放检测件脱离所述待检测车轮后,所述停放检测件输出的信号由第一检 测信号跳变为第二检测信号,并反馈给所述控制机构; 所述控制机构控制所述检测小车停车,使所述举轮转轮装置位于所述待检测车轮 的正下方。 在其中一个实施例中,所述自动探伤机器人还包括安装件,所述安装件设置于所 述举轮转轮装置的顶部,用于安装所述停放检测件,所述自动停车方法还包括如下步骤: 所述控制机构获取所述停放检测件在所述安装件的安装位置; 所述控制机构控制根据所述安装位置控制所述待检测小车的滑动方向。 在其中一个实施例中,所述自动停车方法还包括如下步骤: 若所述停放检测件位移所述安装件中轴线的一侧,所述控制机构控制所述待检测 小车朝向一侧的方向滑动; 若所述停放检测件位移所述安装件中轴线的另一侧,所述控制机构控制所述待检 测小车朝向另一侧的方向滑动。 在其中一个实施例中,所述停放检测件包括第一停放检测件与第二停放检测件, 所述第一停放检测件与所述第二停放检测件对称设置于所述安装件,且所述第一停放检测 件相对于所述第二停放检测件所处的方向为第一方向,所述第二停放检测件相对于所述第 一停放检测件所处的方向为第二方向;所述自动停车方法包括如下步骤: 所述控制机构控制所述检测小车沿所述第一方向运动时,所述第一停放检测件根 据所述待检测车轮的位置输出检测信号; 所述控制机构控制所述检测小车沿所述第二方向运动时,所述第二停放检测件根 据所述待检测车轮的位置输出所述检测信号。 在其中一个实施例中,所述控制机构控制所述检测小车沿所述第一方向运动时, 所述第一停放检测件根据所述待检测车轮的位置输出检测信号,包括如下步骤: 所述控制机构控制所述检测小车沿所第一方向运动,且所述第一停放检测件未识 别所述待检测车轮时,所述第一停放检测件输出第二检测信号; 当所述第一停放检测件识别待检测车轮的边缘,所述第一停放检测件输出的信号 由第二检测信号跳变为第一检测信号,并反馈给所述控制机构; 所述控制机构控制所述检测小车继续沿所述行走小轨减速移动,且所述第一停放 检测件脱离所述待检测车轮之前,所述第一停放检测件输出所述第一检测信号; 当所述第一停放检测件脱离所述待检测车轮后,所述第一停放检测件输出的信号 7 CN 111572591 A 说 明 书 3/18 页 由第一检测信号跳变为第二检测信号,并反馈给所述控制机构; 所述控制机构控制所述检测小车停车,使所述举轮转轮装置位于所述待检测车轮 的正下方。 在其中一个实施例中,所述控制机构控制所述检测小车沿所述第二方向运动时, 所述第二停放检测件根据所述待检测车轮的位置输出检测信号,包括如下步骤: 所述控制机构控制所述检测小车沿所第二方向运动,且所述第二停放检测件未识 别所述待检测车轮时,所述第二停放检测件输出第二检测信号; 当所述第二停放检测件识别待检测车轮的边缘,所述第二停放检测件输出的信号 由第二检测信号跳变为第一检测信号,并反馈给所述控制机构; 所述控制机构控制所述检测小车继续沿所述行走小轨减速移动,且所述第二停放 检测件脱离所述待检测车轮之前,所述第二停放检测件输出所述第一检测信号; 当所述第二停放检测件脱离所述待检测车轮后,所述第二停放检测件输出的信号 由第一检测信号跳变为第二检测信号,并反馈给所述控制机构; 所述控制机构控制所述检测小车停车,使所述举轮转轮装置位于所述待检测车轮 的正下方。 在其中一个实施例中,所述停放检测件包括第一停放检测件与第二停放检测件, 所述第一停放检测件与所述第二停放检测件对称设置于所述安装件,且所述第一停放检测 件相对于所述第二停放检测件所处的方向为第一方向,所述第二停放检测件相对于所述第 一停放检测件所处的方向为第二方向;所述自动停车方法包括如下步骤: 所述控制机构控制所述检测小车沿所述第一方向或所述第二方向滑动, 所述第一停放检测件与所述第二停放检测件中先识别所述待检测车轮边缘的一 个输出第一检测信号,并反馈给所述控制机构,所述控制机构控制所述检测小车减速; 所述第一停放检测件与所述第二停放检测件中后识别所述待检测车轮边缘的一 个输出第一检测信号,并反馈给所述控制机构,所述控制机构控制所述检测小车停车。 在其中一个实施例中,所述控制机构控制所述检测小车减速与所述控制机构控制 所述检测小车停车,包括如下步骤: 所述控制机构控制所述检测小车沿所述第一方向滑动,且所述第一停放检测件与 所述第二停放检测件未识别所述待检测车轮时,所述第一停放检测件与所述第二停放检测 件输出第二检测信号; 当所述第一停放检测件识别待检测车轮的边缘,所述第一停放检测件输出的信号 由第二检测信号跳变为第一检测信号,并反馈给所述控制机构,所述第二停放检测件未识 别所述待检测车轮,所述第二停放检测件输出第二检测信号; 所述控制机构控制所述检测小车沿所述行走小轨减速移动; 当所述第二停放检测件识别所述待检测车轮的边缘,所述第二停放检测件输出的 信号由第二检测信号跳变为第一检测信号,并反馈给所述控制机构; 所述控制机构控制所述检测小车停车,使所述举轮转轮装置位于所述待检测车轮 的正下方。 在其中一个实施例中,所述控制机构控制所述检测小车减速与所述控制机构控制 所述检测小车停车,包括如下步骤: 8 CN 111572591 A 说 明 书 4/18 页 所述控制机构控制所述检测小车沿所述第二方向滑动,且所述第二停放检测件与 所述第一停放检测件未识别所述待检测车轮时,所述第一停放检测件与所述第二停放检测 件输出第二检测信号; 当所述第二停放检测件识别待检测车轮的边缘,所述第二停放检测件输出的信号 由第二检测信号跳变为第一检测信号,并反馈给所述控制机构,所述第一停放检测件未识 别所述待检测车轮,所述第一停放检测件输出第二检测信号; 所述控制机构控制所述检测小车沿所述行走小轨减速移动; 当所述第一停放检测件识别所述待检测车轮的边缘,所述第一停放检测件输出的 信号由第二检测信号跳变为第一检测信号,并反馈给所述控制机构; 所述控制机构控制所述检测小车停车,使所述举轮转轮装置位于所述待检测车轮 的正下方。 在其中一个实施例中,所述安装件为轮辋探伤装置,所述轮辋探伤装置安装于所 述举轮转轮装置顶部的中心位置,所述第一停放检测件与所述第二停放检测件设置于弧形 的所述轮辋探伤装置的两端。 在其中一个实施例中,在所述控制机构控制所述检测小车停车后,所述自动停车 方法还包括如下步骤: 所述控制机构控制所述第一停放检测件与所述第二停放检测件分别检测到所述 待检测车轮的实际距离; 若所述实际距离超出允许距离,所述控制机构控制所述检测小车朝向超出距离相 反的方向移动; 若所述实际距离在所述允许距离范围内,所述控制机构控制所述检测小车停车。 在其中一个实施例中,若所述实际距离超出允许距离,所述控制机构控制所述检 测小车朝向超出距离的方向移动,包括如下步骤: 所述控制机构获取所述超出距离的方向; 所述控制机构控制所述检测小车朝向与所述超出距离相反的方向移动; 所述控制机构控制所述第一停放检测件与所述第二停放检测件实时检测到所述 待检测车轮的实际距离; 所述控制机构判断所述实际距离与所述允许距离的关系,直至所述实际距离在所 述允许距离范围内。 一种列车车轮自动探伤机器人系统,包括: 检测小车,设置于检修地沟中,并可沿行走小轨滑动; 举轮转轮装置,设置于所述检测小车,所述举轮转轮装置用于勾设于钢轨,还用于 举升待检测车轮,并用于驱动待检测车轮转动; 停放检测件,位于所述举轮转轮装置的顶部并偏离所述举轮转轮装置中心,用于 识别所述待检测车轮,并根据所述停放检测件与所述待检测车轮的相对位置输出检测信 息;以及 控制机构,设置于所述检测小车,并与所述停放检测件以及所述举轮转轮装置传 输连接,用于控制所述举轮转轮装置运动,所述控制机构可接收所述检测信息,并根据所述 检测信息控制所述检测小车运动或停车,使所述举轮转轮装置位于所述待检测车轮的正下 9 CN 111572591 A 说 明 书 5/18 页 方。 采用上述技术方案后,本发明至少具有如下技术效果: 本发明的列车车轮自动探伤机器人系统及其自动停车方法,对待检测车轮进行检 修时,控制机构控制检测小车沿检修地沟中的行走小轨滑动,举轮转轮装置上的停放检测 件可以根据待检测车轮的位置输出相应的检测信号,具体的,当停放检测件未检测到待检 测车轮时,停放检测件输出第一检测信号,停放检测件检测到待检测车轮时,停放检测件输 出第二信号,控制机构接根据第一检测信号与第二检测信号的跳变控制检测小车运动或停 车,以使检测小车可以准确的停放于待检测车轮的正下方。通过停放检测件的跳变信号实 现检测小车的停车控制,有效的解决目前通过编码器计数的方式计算停放位置导致的停车 不准的问题,使得举轮转轮装置可以准确的位于待检测车轮的正下方,保证后续检测的准 确性,同时,无需考虑待检测车轮的直径,通用性广。 附图说明 图1为本发明一实施例的列车车轮自动探伤机器人系统的结构示意图; 图2为图1所示的列车车轮自动探伤机器人系统中举轮转轮装置上安装停放检测 件的示意图,且待检测车轮位于举轮转轮装置的左侧,第一停放检测件识别待检测车轮; 图3为图2所示的第一停放检测件识别待检测车轮后第二停放检测件识别到待检 测车轮的示意图; 图4为图1所示的列车车轮自动探伤机器人系统中举轮转轮装置上安装停放检测 件的示意图,且待检测车轮位于举轮转轮装置的右侧,第二停放检测件识别待检测车轮; 图5为图4所示的第二停放检测件识别待检测车轮后第一停放检测件识别到待检 测车轮的示意图; 图6为图1所示的列车车轮自动探伤机器人系统的自动停车方法的流程图; 图7为图6所示的自动停车方法中控制机构接收的信号在第一检测信号与第二检 测信号之间变化步骤的流程图; 图8为图6所示的自动停车方法中停放检测件的数量为两个时的流程图; 图9为图8所示的控制机构控制检测小车沿第一方向运动的流程图; 图10为图8所示的控制机构控制检测小车沿第二方向运动的流程图; 图11为图6所示的自动停车方法中第一停放检测件与第二停放检测件相配合的流 程图; 图12为图11所示的控制机构控制检测小车沿第一方向运动一实施方式的流程图; 图13为图11所示的控制机构控制检测小车沿第一方向运动另一实施方式的流程 图; 图14为图11所示的控制机构控制检测小车沿第二方向运动一实施方式的流程图; 图15为图11所示的控制机构控制检测小车沿第二方向运动另一实施方式的流程 图。 其中: 100-列车车轮自动探伤机器人系统; 110-检测小车; 10 CN 111572591 A 说 明 书 6/18 页 120-举轮转轮装置; 130-自动纠偏回正装置; 140-轮辋探伤装置; 150-机械臂; 160-停放检测件; 161-第一停放检测件; 162-第二停放检测件; 170-控制机构; 171-主电控柜; 172-副电控柜; 300-待检测车轮。











