
技术摘要:
本发明提出一种移动端传感器与外部定位系统的低延迟位姿融合方法,具体包括:将定位信标固定在虚拟现实移动端设备的面板上,定位信标与外部定位系统连接;对虚拟现实移动端设备传感器的旋转数据和外部定位系统的定位信标位移数据进行校准计算,得到相应的校准位姿矩阵 全部
背景技术:
虚拟/增强现实技术综合利用计算机图形学、光电成像技术、传感技术、计算机仿 真、人工智能等多种技术,并借助各种交互设备,旨在为用户提供一个逼真的、具有多重感 知的虚拟世界。 外部定位系统一般有激光定位,外部摄像头定位等技术,这些技术定位的精度和 准备度比较完善。一般来说外部定位系统会提供旋转和位移两组数据以供开发者使用。一 些厂商的技术方案,如NOLO采用的是声光电混合空间定位核心技术,通过基站和头盔定位 器等硬件达到空间定位,该技术可以将外部空间定位融合到虚拟现实移动端,但是其定位 精度,以及硬件要求比较严格,需要虚拟/增强现实移动端连接头盔定位器才能使用。另外 像Oculus Quest这种内置6dof方案,其位移数据通过其内部模块输出,没有引入外部模块。 目前市面上有很多成熟的外部定位系统方案,但是在虚拟/增强现实的场景上面 应用较少,没有比较完善的融合方案,或者存在部分融合方案。对于一般外部定位系统,如 果虚拟/增强现实移动端全部使用其旋转与位移数据,会导致移动端渲染的显示效果延迟 很高,严重影响用户体验。
技术实现要素:
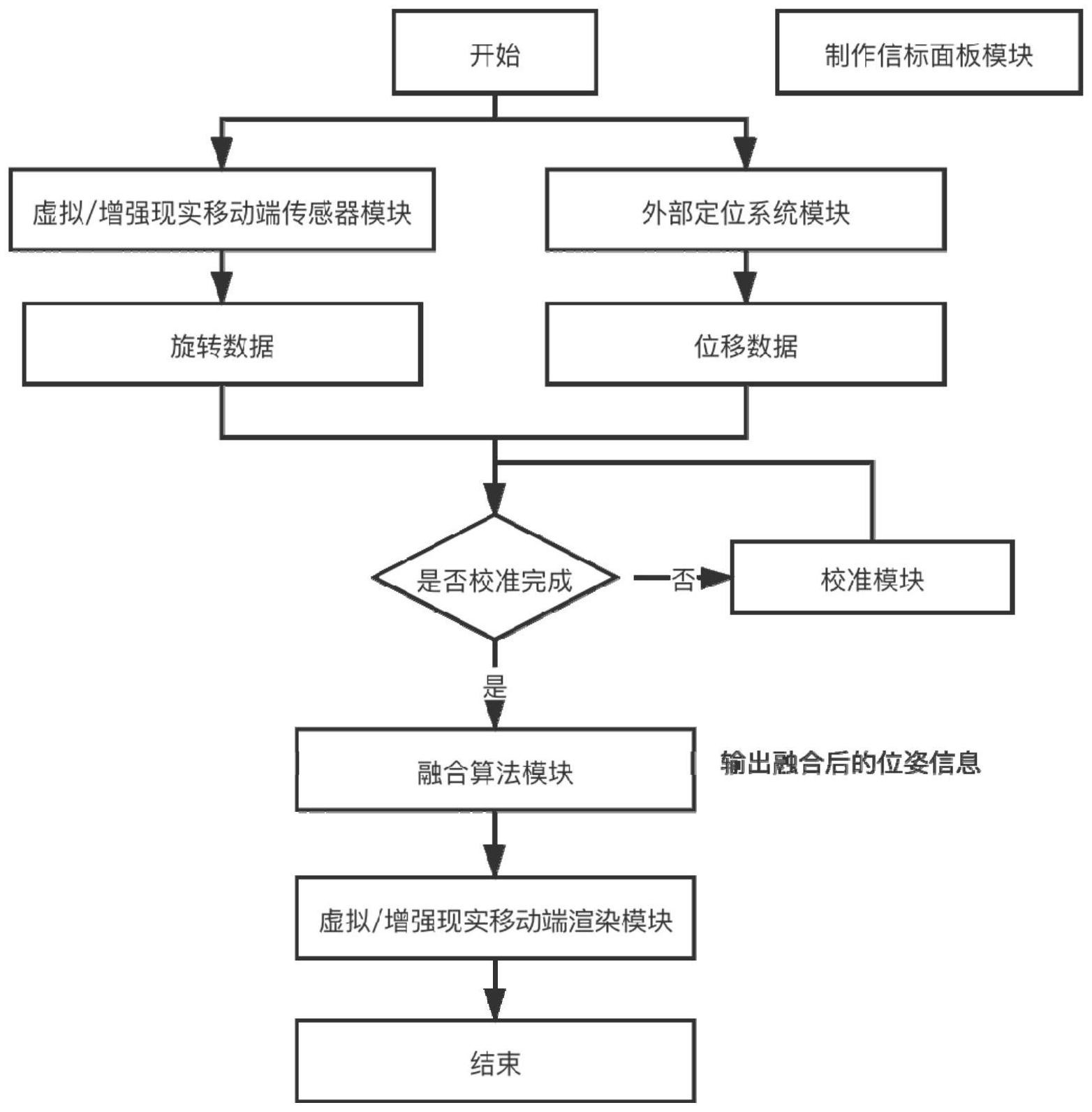
本发明所解决的技术问题在于提供一种移动端传感器与外部定位系统的低延迟 位姿融合方法,通过将外部定位系统的位移数据与虚拟/增强现实移动端传感器的旋转数 据融合使用,保持虚拟/增强现实移动端的低延迟显示效果,实现低延迟位姿融合,不影响 用户体验。 实现本发明目的的技术解决方案为: 一种移动端传感器与外部定位系统的低延迟位姿融合方法,包括以下步骤: 步骤1:将若干个信标定位面板贴放在虚拟现实移动端设备的面板上,所述每个信 标定位面板上设有3个以上定位信标,定位信标与外部定位系统连接,所述定位信标之间相 对垂直布置,测量并记录定位信标之间的距离; 步骤2:虚拟现实移动端设备输出传感器的旋转数据,外部定位系统输出定位信标 的位移数据; 步骤3:对旋转数据和位移数据进行校准计算,得到相应的校准位姿矩阵; 步骤4:获取虚拟现实移动端设备传感器的最新旋转数据和定位信标的最新位移 数据,结合校准位姿矩阵进行融合计算,输出融合位姿数据; 步骤5:将融合位姿数据应用到虚拟/增强现实移动端中,对应用场景进行低延迟 渲染。 4 CN 111580650 A 说 明 书 2/5 页 进一步的,本发明的移动端传感器与外部定位系统的低延迟位姿融合方法,所述 步骤3中对旋转数据和位移数据进行校准具体为:M=T*R .Inverse,其中,R为旋转数据矩 阵,R.Inverse为R的逆矩阵,T为位移数据矩阵,M为校准位姿矩阵。 进一步的,本发明的移动端传感器与外部定位系统的低延迟位姿融合方法,所述 步骤4中融合计算具体包括: 步骤4-1:根据各定位信标的最新位移数据、各定位信标之间的距离和相对位置关 系,计算信标定位面板X轴、Y轴、Z轴的单位方向向量,所述X轴、Y轴、Z轴为外部定位系统定 义的坐标系; 步骤4-2:根据X轴、Y轴、Z轴的单位方向向量,采用旋转角度计算公式计算得到X 轴、Y轴、Z轴的旋转角度,并根据旋转角度输出对应的四元数; 步骤4-3:根据各定位信标的最新位移数据和虚拟现实移动端设备传感器的最新 旋转数据,结合校准位姿矩阵获得信标定位面板的中心坐标、校准位移数据、校准旋转矩 阵,结合四元数采用融合算法输出融合位姿数据。 进一步的,本发明的移动端传感器与外部定位系统的低延迟位姿融合方法,步骤 4-2中X轴、Y轴、Z轴旋转角度的计算公式为: RX=Atan2(VZN.y/VZN.z) RY=Atan2(VXN.z/VXN.x) RZ=Atan2(VYN.x/VYN.y) 其中,Atan2表示反正切,RX为绕X轴旋转角度,RY为绕Y轴旋转角度,RZ为绕Z轴旋 转角度,x、y、z分别为向量的坐标值。 一种移动端传感器与外部定位系统的低延迟位姿融合系统,包括虚拟现实移动端 设备、外部定位系统、校准模块和融合算法模块,虚拟现实移动端设备包括传感器模块和渲 染模块,外部定位系统包括若干个定位信标,定位信标固定在信标定位面板上,信标定位面 板贴放在虚拟现实移动端设备的面板上,传感器模块、定位信标的输出端均与校准模块、融 合算法模块连接,校准模块的输出端与融合算法模块相连,融合算法模块的输出端与渲染 模块连接;其中: 虚拟现实移动端设备的传感器模块用于获取虚拟现实移动端设备的旋转数据,并 输出给校准模块和融合算法模块; 外部定位系统的定位信标用于获取虚拟现实移动端设备的位移数据,并输出给校 准模块和融合算法模块; 校准模块用于对旋转数据和位移数据进行校准计算得到校准位姿矩阵,并输出给 融合算法模块; 融合算法模块用于将传感器的最新旋转数据和定位信标的最新位移数据结合校 准位姿矩阵进行融合计算得到融合位姿数据,输出给虚拟现实移动端设备的渲染模块; 虚拟现实移动端设备的渲染模块用于根据融合位姿数据对应用场景进行低延迟 渲染。 进一步的,本发明的移动端传感器与外部定位系统的低延迟位姿融合系统,所述 同一信标定位面板上的定位信标之间相对垂直布置。 进一步的,本发明的移动端传感器与外部定位系统的低延迟位姿融合系统,融合 5 CN 111580650 A 说 明 书 3/5 页 算法模块包括依次连接的坐标轴计算模块、坐标轴旋转角度计算模块和位姿数据计算模 块,其中:坐标轴计算模块,用于计算信标定位面板X轴、Y轴、Z轴单位方向向量,所述X轴、Y 轴、Z轴为外部定位系统定义的坐标系;坐标轴旋转角度计算模块,用于计算信标定位面板X 轴、Y轴、Z轴的旋转角度,并根据旋转角度输出对应的四元数;位姿数据计算模块,用于根据 各定位信标的最新位移数据和虚拟现实移动端设备传感器的最新旋转数据,结合校准位姿 矩阵获得信标定位面板的中心坐标、校准位移数据、校准旋转矩阵,结合四元数采用融合算 法输出融合位姿数据。 本发明采用以上技术方案与现有技术相比,具有以下技术效果: 本发明的移动端传感器与外部定位系统的低延迟位姿融合方法通过信标定位面 板建立外部定位系统与虚拟/增强现实移动端设备之间的坐标系关系,实现把外部定位系 统的位移数据引入到虚拟/增强现实移动端设备当中,同时保持了虚拟/增强现实移动端设 备自身的低延迟特性。 附图说明 图1是本发明的移动端传感器与外部定位系统的低延迟位姿融合方法的流程示意 图。 图2是本发明的移动端传感器与外部定位系统的低延迟位姿融合系统中虚拟现实 移动端设备与信标定位面板的示意图。 图3是本发明的移动端传感器与外部定位系统的低延迟位姿融合方法的步骤3中 的校准计算的流程图。 图中标号含义:1:虚拟现实移动端设备,2:信标定位面板。











