
技术摘要:
本发明涉及一种精整线探伤样棒存取机器人系统,它包括左右两个并排布置的桁架(1),所述桁架(1)上设置有可前后平移的第一滑座(3),左右两个第一滑座(3)之间设置有支撑横梁(4),所述支撑横梁(4)上设置有两个可左右平移的第二滑座(6),所述第二滑座(6)上设置有可上下升降 全部
背景技术:
棒材厂精整线的工艺流程如下所示: (退火材→离线多辊矫直机)或黑皮材→上料台→抛丸→二辊矫直机→倒棱→分 钢仪→探伤(外探 内探)→成品输送链(计数)→收集、打捆→称重→挂牌→入库。 目前精整线探伤工位阶段厂内通常通过行车和人工配合的方式完成样棒的存取 工作,其劳动强度大、而且存在一定的安全隐患,效率和自动化程度可进一步提高。
技术实现要素:
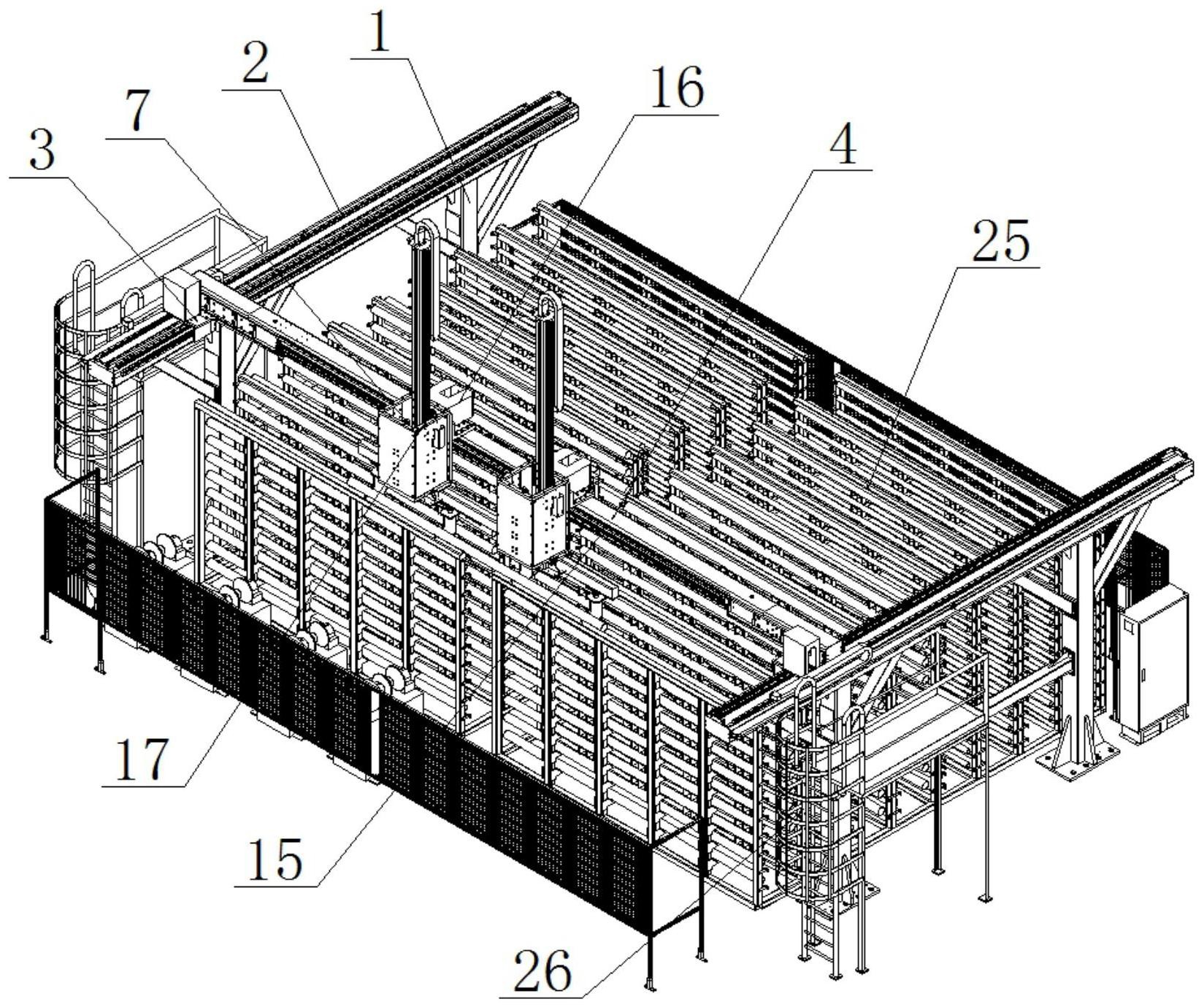
本发明所要解决的技术问题是针对上述现有技术提供一种精整线探伤样棒存取 机器人系统,它能够实现探伤样棒自动上下料,大大降低了工人劳动强度,有效保证了人员 作业安全。 本发明解决上述问题所采用的技术方案为:一种精整线探伤样棒存取机器人系 统,它包括左右两个并排布置的桁架,所述桁架上设置有可前后平移的第一滑座,左右两个 第一滑座之间设置有支撑横梁,所述支撑横梁上设置有两个可左右平移的第二滑座,所述 第二滑座上设置有可上下升降的升降竖梁,左右两个升降竖梁底部之间设置有升降横梁, 所述升降横梁上自左至右依次设置有多个挂钩。 可选的,所述桁架顶部沿前后方向设置有第一导轨,所述第一滑座设置于第一导 轨上。 可选的,所述第一导轨一侧设置有第一齿条,所述第一齿条与第一导轨平行布置, 所述第一滑座上设置有第一电机,所述第一电机输出端设置有第一齿轮,所述第一齿轮与 第一齿条相配合。 可选的,所述支撑横梁上沿左右方向设置有第二导轨,所述第二滑座设置于第二 导轨上。 可选的,所述第二导轨一侧设置有第二齿条,所述第二齿条与第二导轨平行布置, 所述第二滑座上设置有第二电机,所述第二电机输出端设置有第二齿轮,所述第二齿轮与 第二齿条相配合。 可选的,所述第二滑座上自上而下依次设置有多个滑块,所述升降竖梁上沿竖向 设置有第三导轨,所述第三导轨与滑块相配合。 可选的,所述第三导轨一侧设置有第三齿条,所述第三齿条与第三导轨平行布置, 所述第二滑座上还设置有第三电机,所述第三电机输出端设置有第三齿轮,所述第三齿轮 与第三齿条相配合。 可选的,所述挂钩顶部设置有转轴,所述挂钩通过转轴与升降横梁相铰接,所述转 轴上设置有第四齿轮,所述升降横梁上沿横向设置有伸缩气缸,所述伸缩气缸活塞杆端连 3 CN 111591657 A 说 明 书 2/4 页 接设置有伸缩齿条,所述第四齿轮与伸缩齿条相配合。 可选的,左右两个桁架之间设置有样品库;所述样品库包括前后平行布置的多个 存料架,所述存料架前后两侧均自上而下依次设置有多排产品支撑架。 可选的,每排产品支撑架位置处均设置有对射光电开关。 与现有技术相比,本发明的优点在于: 1、本发明能够实现探伤样棒自动上下料,大大降低了工人劳动强度,有效保证了 人员作业安全; 2、本发明样棒存取方式可靠,能够确保样棒存取过程中不会发生倾斜掉落事故; 3、本发明能够确保样棒长时间存放不会发生弯曲变形,并且在存取的过程中表面 不被损伤; 4、本发明设备检修维护方便、故障率低; 5、本发明能够有效控制样棒存取定位和消除存取过程的累计误差; 6、本发明机械手增加了180度旋转机构,能够实现两侧取料。 附图说明 图1为本发明一种精整线探伤样棒存取机器人系统的结构示意图。 图2为图1的主视图。 图3为图2的俯视图。 图4为图2的侧视图。 其中: 桁架1 第一导轨2 第一滑座3 支撑横梁4 第二导轨5 第二滑座6 滑块7 升降竖梁8 第三导轨9 升降横梁10 挂钩11 第一齿条12 第一电机13 第一齿轮14 第二齿条15 第二电机16 第二齿轮17 第三齿条18 第三电机19 4 CN 111591657 A 说 明 书 3/4 页 第三齿轮20 转轴21 第四齿轮22 伸缩气缸23 伸缩齿条24 样品库25 存料架25.1 产品支撑架25.2 对射光电开关25.3 支撑块25.4 V型支撑槽25.5 检修平台26 防护栏27。











