
技术摘要:
本发明为一种无人驾驶拖拉机电控多路阀,包括车辆手动多路阀和拓展电磁多路阀,车辆手动多路阀和拓展多路阀之间相互连接;拓展多路阀包括第一拓展接口、第二拓展接口、两位三通阀和至少一个拓展三位四通阀,第二拓展接口连接两位三通阀的可在阀体内与其余两阀口分别连 全部
背景技术:
随着我国科技水平的提高,拖拉机自动化水平亦逐年提高。与此同时,相比于人 力、畜力等其他耕作方式,拖拉机本身动力充足且效率极高,因此已经成为我国生产劳作的 主要动力。近年来,为了进一步解放劳动力,拖拉机的无人驾驶技术迅速发展。目前而言,拖 拉机的无人驾驶技术主要集中于车辆本体,而对于后端农具部分研究较少。但在实际耕作 过程中,拖拉机与农具一体工作,才能实现实际的耕作过程。拖拉机与农具的配合电控化已 经迫在眉睫,其中的液压动力输出更是重中之重。 小型拖拉机的无人驾驶作用较小,因此大型拖拉机的无人驾驶为当前研究重点。 对于大型拖拉机而言,其液压系统大致可分为三路,一路用于液压助力转向系统,一路用于 变速箱的润滑、冷却,最后一路则为专与农具配合的液压油路。该油路又可以分为两部分, 一部分则为农具提升提供动力,而另一部分则为液压动力的输出,前者由液压缸实现,后者 则由多路阀实现。目前而言,拖拉机上所安装的多路阀多为手动多路阀,尚无电磁的多路阀 产品。为了使得无人驾驶系统能够在拖拉机上运行,需要对该手动多路阀进行电控化改造。 专利一种电比例负载敏感多路阀,专利号CN109779993A公开了一种电比例负载敏 感多路阀,采用比例电磁阀及比例电磁铁来控制阀片的油路,使其具有良好的流量控制性 能,操控舒适性大大提高,并且能实现程序控制满足无人化的需求。但是该方案需要在实现 过程中,需要将原车安装的手动多路阀进行整体的替换,需与整车厂合作,对整车液压系统 进行整体的改造、升级等。该方案无法应用于存量拖拉机。 针对此问题,现需一种针对存量拖拉机手动多路阀的拓展方案,以实现其电控化。 实现不需要对原车进行拆卸,且可形成一个整体的产品,独立于整个车辆系统外。
技术实现要素:
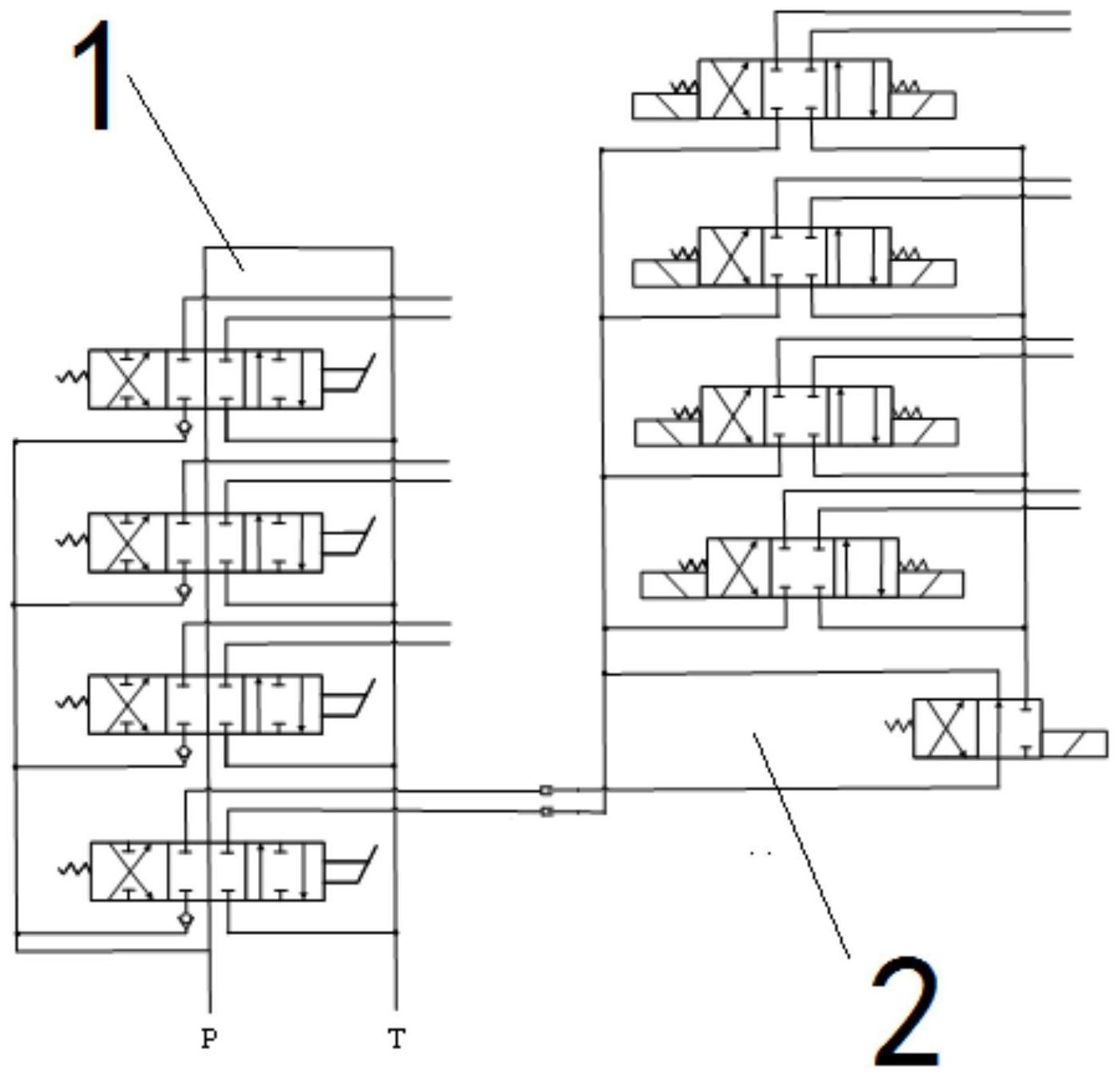
本发明是为了解决现有技术中原车安装的手动多路阀进行整体的替换,需与整车 厂合作,对整车液压系统进行整体的改造、升级,无法应用于存量拖拉机的问题,提供了一 种无人驾驶拖拉机电控多路阀及其控制方法,通过手动和自动驾驶部分采用相互独立且可 拼合的油路,解决了上述问题。 本发明提供了一种无人驾驶拖拉机电控多路阀,包括车辆手动多路阀和拓展多路 阀,车辆手动多路阀和拓展多路阀之间相互连接;拓展多路阀包括第一拓展接口、第二拓展 接口、两位三通阀和至少一个的拓展三位四通阀,第二拓展接口连接两位三通阀,两位三通 阀连接拓展三位四通阀,第一拓展接口与拓展三位四通阀连接且油路并联两位三通阀和拓 展三位四通阀之间的其中一条油路,拓展三位四通阀其余两阀口在阀体内相互不连接,用 于连接农具。 车辆手动多路阀和拓展多路阀分别用于手动控制和自动控制,通过车辆手动多路 5 CN 111594501 A 说 明 书 2/9 页 阀和拓展多路阀的可拆卸连接,以及拓展多路阀油路通断控制通过车辆手动多路阀控制实 现手动和自动的切换,无需对原车进行拆卸,且可形成一个整体的产品,独立于整个车辆系 统外。 本发明所述的一种无人驾驶拖拉机电控多路阀,作为优选方式,拓展三位四通阀 包括第一阀口、第二阀口、第三阀口和第四阀口,两位三通阀包括第五阀口、第六阀口和第 七阀口,第五阀口连接第一拓展接口,第六阀口连接第二阀口,第七阀口连接第一阀口,第 三阀口和第四阀口用于连接农具; 拓展三位四通阀处于第一工作位置时,第一阀口、第二阀口、第三阀口和第四阀口 均不连通;拓展三位四通阀处于第二工作位置时,第一阀口连接第四阀口,第二阀口连接第 三阀口;拓展三位四通阀处于第三工作位置时,第一阀口连接第三阀口,第一阀口连接第四 阀口; 两位三通阀处于第一工作位置时,第五阀口连接第六阀口;两位三通阀处于第二 工作位置时,第五阀口连接第七阀口。 本发明所述的一种无人驾驶拖拉机电控多路阀,作为优选方式,拓展多路阀包括 至少两个拓展三位四通阀,各拓展三位四通阀之间相互并联。 本发明所述的一种无人驾驶拖拉机电控多路阀,作为优选方式,车辆手动多路阀 包括第一三位六通阀、至少一个的第二三位六通阀、第一单向阀和与第二三位六通阀数量 相同的第二单向阀,第一三位六通阀通过第一单向阀连接压力油口,第二三位六通阀通过 第二单向阀连接压力油口,第一三位六通阀连接压力油口,第一三位六通阀和第二三位六 通阀分别连接回油口,第一三位六通阀连接第二三位六通阀,第一三位六通阀和第二三位 六通阀连接阀口对应的阀口连接回油口,第一三位六通阀连接第一拓展接口和第二拓展接 口。 本发明所述的一种无人驾驶拖拉机电控多路阀,作为优选方式,第一三位六通阀 包括第一手动阀口、第二手动阀口、第三手动阀口、第四手动阀口、第五手动阀口和第六手 动阀口,第一手动阀口连接第一单向阀,第二手动阀口连接压力油口,第三手动阀口连接回 油口,第四手动阀口连接第二拓展接口,第五手动阀口连接回油口,第六手动阀口连接第一 拓展接口; 第一三位六通阀位于第一工作位置时,第二手动阀口连接第五手动阀口; 第一三位六通阀位于第二工作位置时,第一手动阀口连接第六手动阀口,第二手 动阀口连接第四手动阀口; 第一三位六通阀位于第三工作位置时,第一手动阀口连接第四手动阀口,第六手 动阀口连接第三手动阀口。 本发明所述的一种无人驾驶拖拉机电控多路阀,作为优选方式,第二三位六通阀 包括第七手动阀口、第八手动阀口、第九手动阀口、第十手动阀口、第十一手动阀口和第十 二手动阀口,第七手动阀口连接第二单向阀,第八手动阀口连接压力油口,第九手动阀口连 接回油口,第十一手动阀口连接回油口,第十二手动阀口和第十手动阀口用于连接手动农 具; 第二三位六通阀位于第一工作位置时,第八手动阀口连接第十一手动阀口; 第二三位六通阀位于第二工作位置时,第七手动阀口连接第十二手动阀口,第九 6 CN 111594501 A 说 明 书 3/9 页 手动阀口连接第十手动阀口; 第二三位六通阀位于第三工作位置时,第七手动阀口连接第十手动阀口,第九手 动阀口连接第十二手动阀口。 本发明所述的一种无人驾驶拖拉机电控多路阀,作为优选方式,还包括控制器,控 制器与拓展多路阀电连接,控制器包括信息获取模块、信息处理模块、指令下达模块和信息 存储模块,信息获取模块用于获取当前拖拉机安装农具的种类、农具状态以及农具连接的 阀口,信息存储模块用于存储农具完成特定动作所需的指令,信息处理模块用于通过信息 获取模块的信息调用信息存储模块中预存的农具动作指令,指令下达模块用于将信息处理 模块中调取的指令信息发送至相应的电磁阀,信息获取模块将采集信息传输至信息处理模 块,信息处理模块通过采集信息调用信息存储模块的指令信息并传输给指令下达模块。 指令下达模块将农具的控制信息发送至拓展多路阀,实现对两位三通阀和拓展三 位四通阀的供电控制,从而实现对农具动作的控制。 本发明所述的一种无人驾驶拖拉机电控多路阀的控制方法,包括以下步骤: S1、拖拉机开始作业; S2、操作员判断是否采用无人驾驶模式,若是,驾驶员通过操纵杆将第一三位六通 阀切换至第二工作位置或第三工作位置,使拖拉机进入无人驾驶模式;若否,驾驶员通过操 纵杆保持第一三位六通阀处于第一工作位置,拖拉机的控制器不对拓展三位四通阀供电, 进入手动操作模式; S3、根据步骤S2中的手动驾驶模式或者自动驾驶模式,连接农具,并进行作业; S4、拖拉机作业完成,停机。 本发明所述的一种无人驾驶拖拉机电控多路阀的控制方法,作为优选方式,步骤 S3在无人驾驶模式下,具体包括以下步骤: S31、将农具与拓展三位四通阀的第三阀口和第四阀口连接; S32、通过拖拉机操纵杆将第一三位六通阀从第一工作位置切换到第二工作位置 或第三工作位置; S33、控制器判断农具是否需要动作,若需要动作,则控制器同时向两位三通阀和 拓展三位四通阀供电,控制两位三通阀连通拓展三位四通阀,拓展三位四通阀从第一工作 位置切换至第二工作位置或第三工作位置,运行步骤S34;若不需要动作,则控制器保持不 向两位三通阀和拓展三位四通阀供电,重复运行步骤S33; S34、判断动作是否结束,若结束则停止向两位三通阀和拓展三位四通阀供电,若 未结束则持续供电; S35、判断作业是否结束,若否则重复步骤S33,若是则运行步骤S4。 本发明所述的一种无人驾驶拖拉机电控多路阀的控制方法,作为优选方式,步骤 S3在手动驾驶模式下,具体包括以下步骤: S35、判断所使用的农具需要的多路阀数量是否为第一三位六通阀和第二三位六 通阀的数量和,若是,则断开第一拓展接口和第二拓展接口的连接;若否,则保持第一拓展 接口和第二拓展接口的连接; S36、安装农具至第十二手动阀口和第十手动阀口,若安装的农具需要的多路阀数 量为第一三位六通阀和第二三位六通阀的数量和,则将农具同时安装至第四手动阀口和第 7 CN 111594501 A 说 明 书 4/9 页 六手动阀口; S37、驾驶员判断农具是否需要动作,若需要动作,则通过拖拉机操纵杆将第一三 位六通阀从第一工作位置切换到第二工作位置或第三工作位置,并运行步骤S38;若不需 要,则保持第一三位六通阀处于第一工作位置,并重复步骤S37; S38、判断动作是否结束,若是则将第一三位六通阀切换至第一工作位置;若否则 保持第一三位六通阀处于第二工作位置或第三工作位置; S39、判断作业是否结束,若否则重复步骤S37,若是则运行步骤S4。 本发明所述的一种无人驾驶拖拉机电控多路阀,原油路中,进油口和回油口通过 液压管与拖拉机原车的一路进出油口进行连接。在所有电磁阀均不通电的状态下,第一三 位六通阀、第二三位六通阀、两位三通阀和拓展三位四通阀均处于第一工作位置,油液在拖 拉机原装多路阀中直接返回油缸,处于中位卸荷状态。 当处于手动时,农具的液压油管连接至车辆手动多路阀的第二三位六通阀,一般 的农具最多需要三路液压油管,即连接三个第二三位六通阀。假设需要四路,则将拓展三位 四通阀拔掉即可,使农具连接第一三位六通阀,第一三位六通阀和第二三位六通阀通过操 作杆处于非第一工作位置时,油液进入农具,驱动农具动作。 当处于自动驾驶时,安装农具后,第一三位六通阀处于非第一工作位置,油液进入 拓展多路阀,假设农具需要动作,此时某一油路需要工作。此时,两位三通阀电磁阀通电,且 控制器控制对应油路的拓展三位四通阀工作,对应的第三阀口和第四阀口其中一个输出高 压油,另一油口为回油口,不同的农具不同动作所需要的高压油不同,这需要在控制系统中 进行判断。当农具的动作完毕后,相应的两位三通阀与三位四通阀回位,该动作完成。有的 农具可能需要2、3路油路顺序动作或者同时动作,这些动作均须在控制器中进行指令的输 出。 本发明有益效果如下: (1)通过车辆手动多路阀和拓展多路阀的可拆卸连接,避免对整车液压系统进行 整体的改造、升级; (2)拓展多路阀可拆卸,使车辆手动多路阀在切换为手动时有足够的油路连接农 具; (3)不需要对原车进行拆卸,且可形成一个整体的产品,独立于整个车辆系统外。 附图说明 图1为一种无人驾驶拖拉机电控多路阀示意图; 图2为一种无人驾驶拖拉机电控多路阀拓展多路阀示意图; 图3为一种无人驾驶拖拉机电控多路阀两位三通阀示意图; 图4为一种无人驾驶拖拉机电控多路阀拓展三位四通阀示意图; 图5为一种无人驾驶拖拉机电控多路阀车辆手动多路阀示意图; 图6为一种无人驾驶拖拉机电控多路阀第一三位六通阀示意图; 图7为一种无人驾驶拖拉机电控多路阀第二三位六通阀示意图; 图8为一种无人驾驶拖拉机电控多路阀控制方法流程图。 附图标记: 8 CN 111594501 A 说 明 书 5/9 页 1、车辆手动多路阀;11、第一三位六通阀;111、第一手动阀口;112、第二手动阀口; 113、第三手动阀口;114、第四手动阀口;115、第五手动阀口;116、第六手动阀口;12、第二三 位六通阀;121、第七手动阀口;122、第八手动阀口;123、第九手动阀口;124、第十手动阀口; 125、第十一手动阀口;126、第十二手动阀口;13、第一单向阀;14、第二单向阀;2、拓展多路 阀;21、第一拓展接口;22、第二拓展接口;23、两位三通阀;231、第五阀口;232、第六阀口; 233、第七阀口;24、拓展三位四通阀;241、第一阀口;242、第二阀口;243、第三阀口;244、第 四阀口。











