
技术摘要:
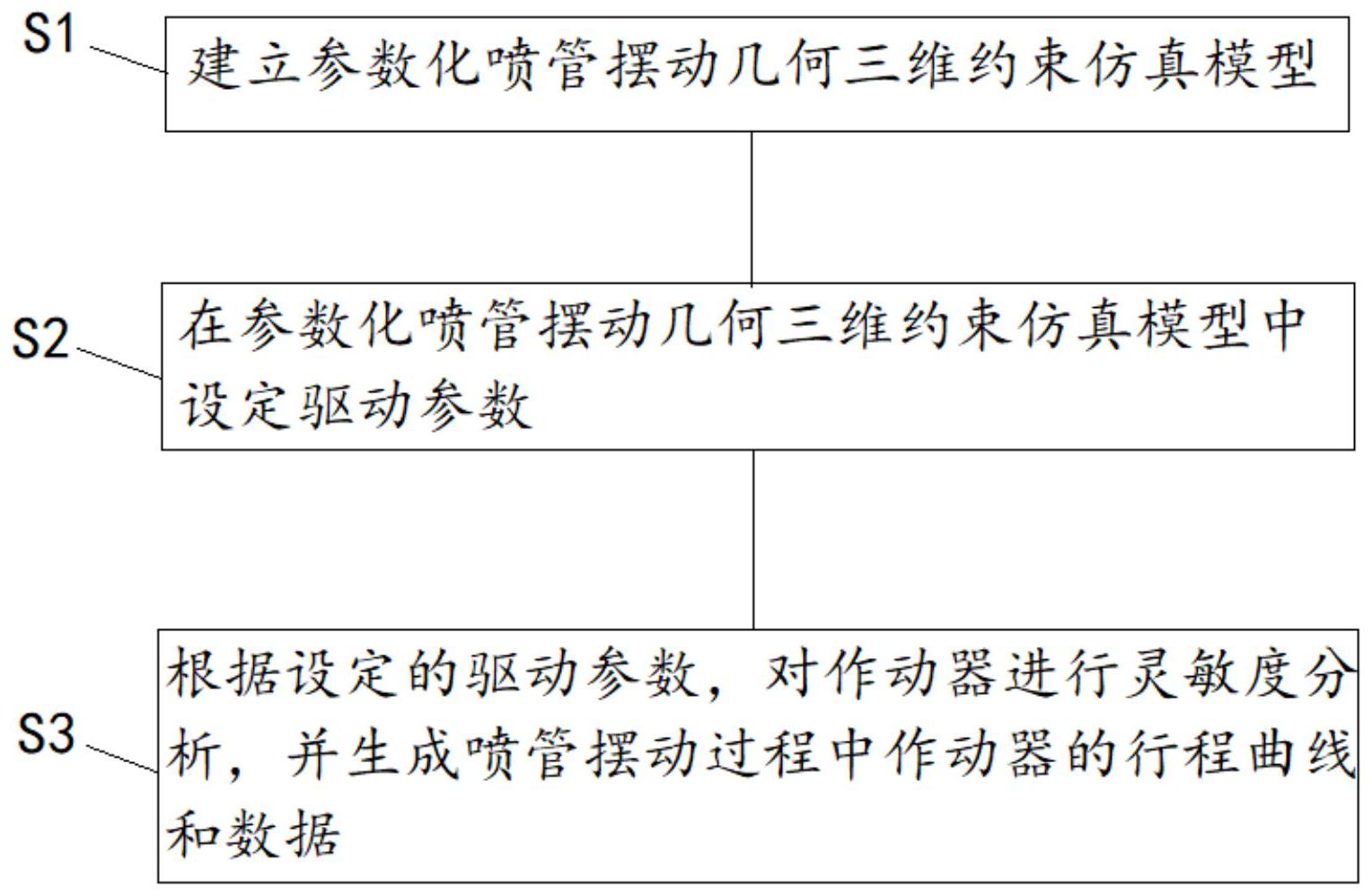
本申请提供一种火箭发动机喷管摆动仿真分析方法及系统,该仿真分析方法包括如下步骤:建立参数化喷管摆动几何三维约束仿真模型;在所述参数化喷管摆动几何三维约束仿真模型中设定驱动参数;根据设定的驱动参数,对作动器进行灵敏度分析,并生成喷管摆动过程中作动器的 全部
背景技术:
在火箭发动机摆动喷管中,当喷管的摆心和上支点垂直于发动机轴线的平面重 合,互成90度的两个伺服作动器在喷管摆动时无牵连摆动。当喷管的摆心和上支点垂直于 发动机轴线的平面不重合,互成90度的两个作动器在喷管摆动时形成几何约束,从而造成 喷管的牵连摆动,现有对火箭发动机喷管摆动分析方法,包括如下两种: 第一、建立约束方程的分析方法,首先建立假设:(1)喷管不能扭转;(2)喷管扩散 段为不能变形的刚体;(3)发动机内部建压后,喷管的摆心不会下沉。通过以上三个假设,建 立作动器上、下支点、喷管摆心、喷管扩散段轴线组成的立体几何模型,建立喷管摆动几何 约束方程,根据喷管摆动几何约束方程,逐点计算两个作动器喷管不同摆角和摆动方位角 时的关系方程,得到两个伺服作动器行程和作动器的行程曲线。该方法存在的缺陷是:逐点 计算时工作量大,采用编程求解约束方程的方法对设计人员的编程能力要求较高。 第二,建立运动仿真的方法,在三维运动仿真软件中建立运动仿真分析,用球铰代 替喷管摆心和伺服作动器的关节轴承,通过平移铰代替伺服作动器的伸长和缩短,布置动 态测量特征得出两个伺服作动器的行程曲线,该方法存在的缺陷是:喷管在全轴摆动时建 立球铰约束,但是球铰约束无法解决喷管摆动过程中不能扭转的问题。
技术实现要素:
本申请的目的在于提供一种火箭发动机喷管摆动仿真分析方法及系统,该仿真分 析方法通过建立参数化喷管摆动几何三维约束仿真模型,在喷管设计时,直接生成作动器 行程曲线数据,用于验证火箭飞行控制算法。 为达到上述目的,本申请提供一种火箭发动机喷管摆动仿真分析方法包括如下步 骤:建立参数化喷管摆动几何三维约束仿真模型;在所述参数化喷管摆动几何三维约束仿 真模型中设定驱动参数;根据设定的驱动参数,对作动器伸长量进行灵敏度分析,并生成喷 管摆动过程中作动器的行程曲线和数据。 如上的,其中,所述驱动参数包括喷管摆角和/或摆动方位角。 如上的,其中,建立参数化喷管摆动几何三维约束仿真模型的方法包括如下步骤: 在三维空间内建立喷管摆动前的摆动几何;预先建立喷管摆动前的摆动几何和喷管摆动后 的摆动几何之间的空间几何关系;根据喷管摆动前的摆动几何和预先建立的空间几何关系 建立喷管摆动后的摆动几何。 如上的,其中,所述喷管摆动前的摆动几何包括喷管摆动前的结构尺寸和位置约 束;喷管摆动前的结构尺寸和位置约束为预先设计的。 如上的,其中,所述喷管摆动后的摆动几何包括喷管摆动后的结构尺寸和位置约 4 CN 111553028 A 说 明 书 2/6 页 束; 其中,喷管摆动后的结构尺寸与喷管摆动前的几何尺寸相同,喷管摆动后的位置 约束根据喷管摆动前的位置约束和设定的驱动参数获得。 如上的,其中,喷管摆动前的摆动几何和喷管摆动后的摆动几何中的任意下支点 具有如下空间几何关系: |YB1’sinβ-ZB1’cosβ|=|YB1sinβ-ZB1cosβ|; XP’(XB1’-XP’) YP’(YB1’-YP’) ZP’(ZB1’-ZP’)=0; (XB1’-XP’)2 (Y 2 2B1’-YP’)2 (ZB1’-ZP’) =R ; XP’=Xcosα; YP’=Xsinαcosβ; ZP’=Xsinαsinβ; 其中,β表示摆动方位角;α表示摆角;XB1’表示喷管摆动后作动器下支点的X轴坐 标;YB1’表示喷管摆动后作动器下支点的Y轴坐标;ZB1’表示喷管摆动后作动器下支点的Z轴 坐标;YB1表示喷管摆动前作动器下支点的Y轴坐标;ZB表示喷管摆动前作动器下支点的Z轴 坐标;X表示作动器下支点距离喷管摆心的距离;XP’表示喷管摆动后作动器下支点所在圆的 圆心的X轴坐标;YP’表示喷管摆动后作动器下支点所在圆的圆心的Y轴坐标;ZP’表示喷管摆 动后作动器下支点所在圆的圆心的Z轴坐标。 如上的,其中,生成喷管摆动过程中作动器的行程曲线的方法包括如下步骤:建立 驱动参数与作动器行程的关系分析模型;对所述关系分析模型中的驱动参数进行连续赋 值,得出喷管摆动过程中作动器的行程曲线。 如上的,其中,所述作动器的行程计算方法如下:根据喷管摆动前的摆动几何获得 喷管的零位长度;根据喷管摆动后的摆动几何获得喷管摆动后的测量特征值;根据获得的 零位长度和测量特征值计算作动器的伸长量。 如上的,其中,所述零位长度指为:喷管摆动前,作动器的上支点和下支点之间的 直线距离;所述测量特征值指为:喷管摆动后,作动器的上支点和下支点之间的直线距离。 一种火箭发动机喷管摆动仿真分析系统,包括:模型构建模块,用于建立参数化喷 管摆动几何三维约束仿真模型;驱动参数设定模块,用于在所述参数化喷管摆动几何三维 约束仿真模型中设定驱动参数;生成模块,用于根据设定的驱动参数,对作动器进行灵敏度 分析,并生成喷管摆动过程中作动器的行程曲线和数据。 本申请实现的有益效果如下: (1)本申请建立了参数化喷管摆动几何三维约束仿真模型,摆动喷管设计人员无 需逐点计算喷管摆动过程中作动器的零位长度和行程值,只需在模型中输入喷管摆角和/ 或摆动方位角的大小,即可输出作动器的零位长度和行程值。设计人员无需学习复杂的编 程语言求解摆动方程,显著的降低了设计人员的劳动强度和对喷管设计人员的水平要求。 (2)本申请建立的参数化喷管摆动几何三维约束仿真模型具有摆动喷管设计分析 的通用性,具有很好的移植性和适用性。 附图说明 为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现 5 CN 111553028 A 说 明 书 3/6 页 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 申请中记载的一些实施例,对于本领域技术人员来讲,还可以根据这些附图获得其他的附 图。 图1为本发明实施例的一种火箭发动机喷管摆动仿真分析方法的流程图。 图2为本发明实施例的建立参数化喷管摆动几何三维约束仿真模型的流程图。 图3为本发明实施例的喷管摆动前及摆动后的摆动几何的示意图。 图4为本发明实施例的一种牵连摆动几何的示意图。 图5为本发明一个实施例的第一作动器的行程曲线。 图6为本发明一个实施例的第二作动器的行程曲线。 图7为本发明另一个实施例的第一作动器的行程曲线。 图8为本发明另一个实施例的第二作动器的行程曲线。 图9为本发明实施例的一种火箭发动机喷管摆动仿真分析系统的结构示意图。 附图标记:10-模型构建模块;20-驱动参数设定模块;30-生成模块;100-仿真分析 系统。











