
技术摘要:
本发明公开了一种镭射激光钻孔机器人,包括钻孔机器人本体,所述钻孔机器人本体的前侧开设有检测口,所述检测口的内部活动安装有密封门,所述检测口内壁的左右两侧均开设有方形凹槽,两个方形凹槽的内部均固定安装有挤压装置,所述密封门的左右两侧均开设有方形放置槽 全部
背景技术:
机器人是一种能够半自主或全自主工作的智能机器,具有感知、决策、执行等基本 特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类 生活,扩大或延伸人的活动及能力范围。 现有的钻孔机器人,为了满足市场需求,一般都是往如何更好钻孔和如何更方便 使用者使用这些方面进行优化,往往忽略了是否能够很好的对内部进行检修,现有的钻孔 机器人具有,钻孔的效果更好和更方便使用者使用这些有益之处,但是有一定的限制,在正 常使用时因钻孔机器人一般都是由各种零部件拼凑而成,在长时间使用或在地下工作时, 很容易出现内部的零部件出现损坏的现象,往往检修起来非常的麻烦,现有技术存在的问 题是:检修的过程麻烦,不利于快速检修。
技术实现要素:
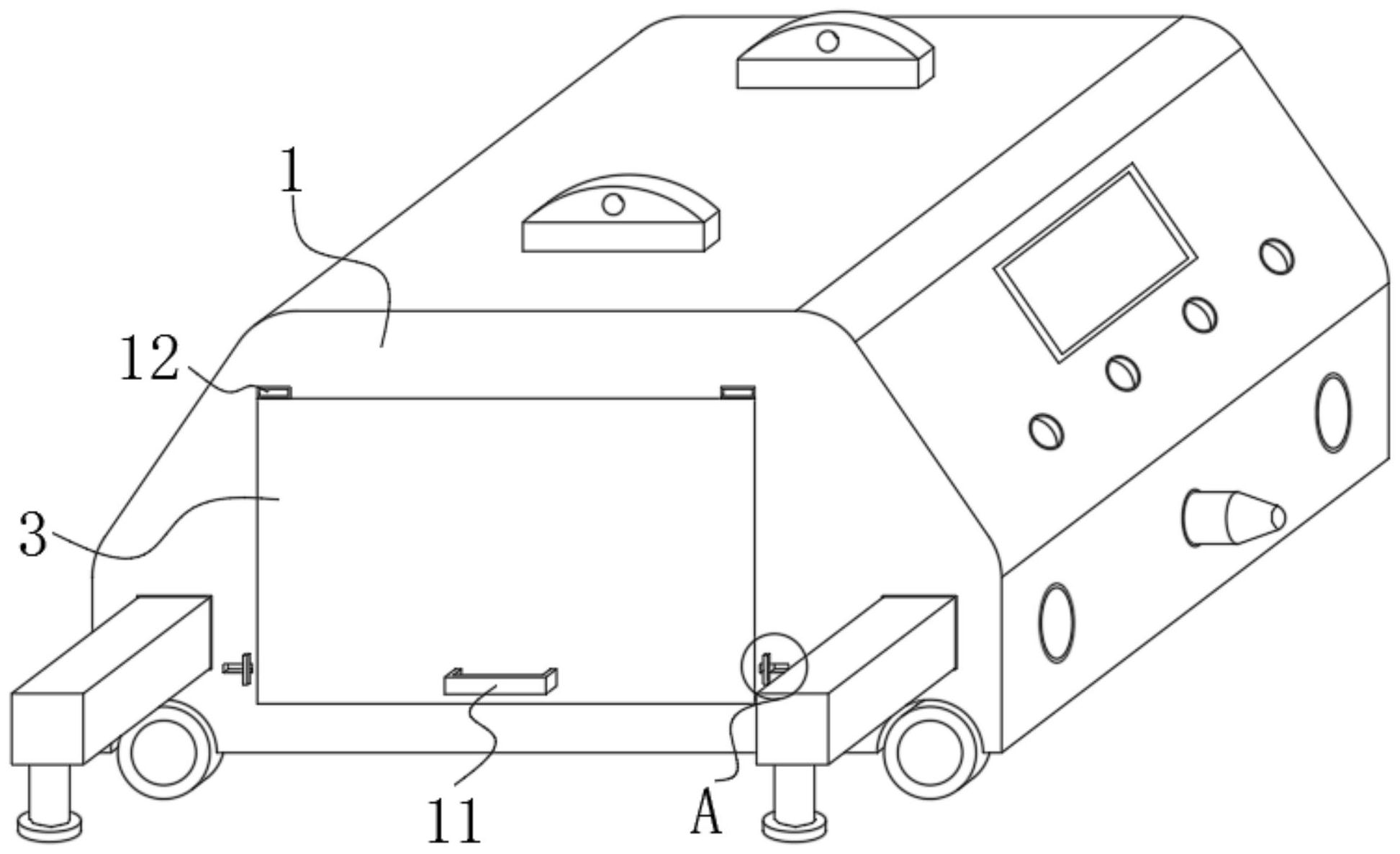
针对现有技术存在的问题,本发明提供了一种镭射激光钻孔机器人,具备快速检 修的优点,解决了现有检修的过程麻烦,不利于快速检修的问题。 本发明是这样实现的,一种镭射激光钻孔机器人,包括钻孔机器人本体,所述钻孔 机器人本体的前侧开设有检测口,所述检测口的内部活动安装有密封门,所述检测口内壁 的左右两侧均开设有方形凹槽,两个方形凹槽的内部均固定安装有挤压装置,所述密封门 的左右两侧均开设有方形放置槽,两个方形放置槽的内部均固定安装有定位机构。 作为本发明优选的,右侧所述挤压装置包括第一挤压弹簧,所述第一挤压弹簧的 右侧与方形凹槽的内壁固定连接,所述第一挤压弹簧的左侧固定安装有移动块,所述移动 块的外表面与方形凹槽的内壁滑动连接,所述移动块的前侧固定安装有连接块,所述连接 块的前侧贯穿钻孔机器人本体并延伸至钻孔机器人本体的前侧,所述连接块的前侧固定安 装有推进手柄,所述移动块的左侧固定安装有挤压块。 作为本发明优选的,右侧所述定位机构包括第二挤压弹簧,所述第二挤压弹簧的 左侧与方形放置槽的内壁固定连接,所述第二挤压弹簧的右侧固定安装有方形挡块,所述 方形挡块的外表面与方形放置槽的内壁滑动连接,所述方形挡块的右侧固定安装有方形凸 块,所述方形凸块的右侧与方形凹槽的内部插接。 作为本发明优选的,所述钻孔机器人本体的前侧开设有方形通孔,所述方形通孔 的后侧与方形凹槽的内部相互连通,所述方形通孔的内壁与连接块的外表面滑动连接。 作为本发明优选的,所述方形放置槽内壁的顶部和底部均开设有限位槽,所述方 形挡块的顶部和底部均固定安装有限位块,两个限位块相背离的一端均与限位槽的内部滑 动连接。 作为本发明优选的,所述密封门的前侧固定安装有提拉手柄,所述提拉手柄位于 3 CN 111571042 A 说 明 书 2/4 页 密封门前侧底部的中部。 作为本发明优选的,所述密封门顶部的左右两侧均固定安装有铰接座,两个铰接 座的顶部均与钻孔机器人本体的前侧固定连接。 作为本发明优选的,所述方形凸块与方形凹槽的配合端呈斜角,且斜角为十度至 四十五度之间。 与现有技术相比,本发明的有益效果如下: 1、本发明通过设置钻孔机器人本体、检测口、密封门、方形凹槽、挤压装置、第一挤 压弹簧、移动块、连接块、推进手柄、方形放置槽、定位机构、第二挤压弹簧、方形挡块、方形 凸块、方形通孔、限位槽、限位块、提拉手柄和铰接座的配合使用,解决了现有检修的过程麻 烦,不利于快速检修的问题,该镭射激光钻孔机器人,具备快速检修的优点。 2、本发明通过人力推动推进手柄来实现整个挤压装置的动力源,因力是可以传递 的,在推动推进手柄的同时通过连接块带动移动块移动,从而实现给予第一挤压弹簧一个 形变的力,这样就能够实现将卡进方形凹槽内部的方形凸块推出,从而实现密封门的初步 打开。 3、本发明通过方形凸块受力来实现整个定位机构的动力源,因力是可以传递的, 在方形凸块受力的同时通过方形挡块给予第二挤压弹簧一个形变的力,这样就能够实现将 方形凸块挤入方形放置槽的内部,从而实现密封门进一步的打开,使检修的效果更好。 4、本发明通过设置方形通孔,且方形通孔的内壁与连接块的外表面滑动连接,这 样就能够使连接块的运动轨迹更加稳定,使密封门的打开效果更好,同时检修的效果也更 好。 5、本发明通过在方形放置槽内壁的顶部和底部开设有限位槽,这样就能够实现与 方形挡块顶部和底部固定安装的限位块滑动连接,这样不仅能够很好的限制方形挡块的位 置,同时也能使方形挡块的运动轨迹更加稳定,使检修的效果更好。 6、本发明通过在密封门的前侧固定安装有提拉手柄,这样就能够使密封门的打开 效果更好,同时检修的效果也更好。 7、本发明通过设置铰接座,同时铰接座与密封门为紧配,这样就能够实现密封门 打开至什么位置,就固定在什么位置,使密封门打开的效果更好,同时检修的效果也更好。 8、本发明通过在方形凸块与方形凹槽的配合端呈斜角,这样就能够使方形凸块从 方形凹槽内部的推出效果更好,同时检修的效果也更好。 附图说明 图1是本发明实施例提供的结构示意图; 图2是本发明实施例提供的密封门打开立体图; 图3是本发明实施例提供的定位机构细化图; 图4是本发明实施例提供的挤压装置细化图; 图5是本发明实施例提供的图1中A处放大图; 图6是本发明实施例提供的图2中B处放大图; 图7是本发明实施例提供的方形挡块与限位块配合立体图。 图中:1、钻孔机器人本体;2、检测口;3、密封门;4、方形凹槽;5、挤压装置;501、第 4 CN 111571042 A 说 明 书 3/4 页 一挤压弹簧;502、移动块;503、连接块;504、推进手柄;6、方形放置槽;7、定位机构;701、第 二挤压弹簧;702、方形挡块;703、方形凸块;8、方形通孔;9、限位槽;10、限位块;11、提拉手 柄;12、铰接座。











