
技术摘要:
本发明提供了一种基于无模型自适应算法的多爪针自动穿刺装置及控制方法,用于控制多爪针运动。本发明的多爪针自动穿刺装置,包括控制模块和执行机构;控制模块解析上位机传输的路径跟踪控制指令,生成电机控制量输出;执行机构包括传动驱动模块和多爪针体,根据电机控 全部
背景技术:
软组织穿刺器械是一种重要的临床手术器械,其优点是手术创伤小、操作方便、实 用性强,手术费用低等,广泛应用于临床诊断、治疗、肿瘤化疗与放疗、局部麻醉等领域。 目前,穿刺手术通常是医疗人员基于医疗影像的引导下进行经皮穿刺,将穿刺针 穿入目标部位,进行相应的手术操作。但传统穿刺针是刚性的,每次只能定位一个靶点,因 此穿刺路径较为单一,多次活检需要进行反复穿刺会引起患者较大不适。另外实际手术中 受医疗人员体力、经验等因素的影响制约穿刺针难以精准操控。为解决上述问题,对穿刺器 械的结构优化和自动控制在医疗辅助设备的应用开展进一步深入研究以实现精准定位,最 大程度提高穿刺质量,减少病人痛苦。
技术实现要素:
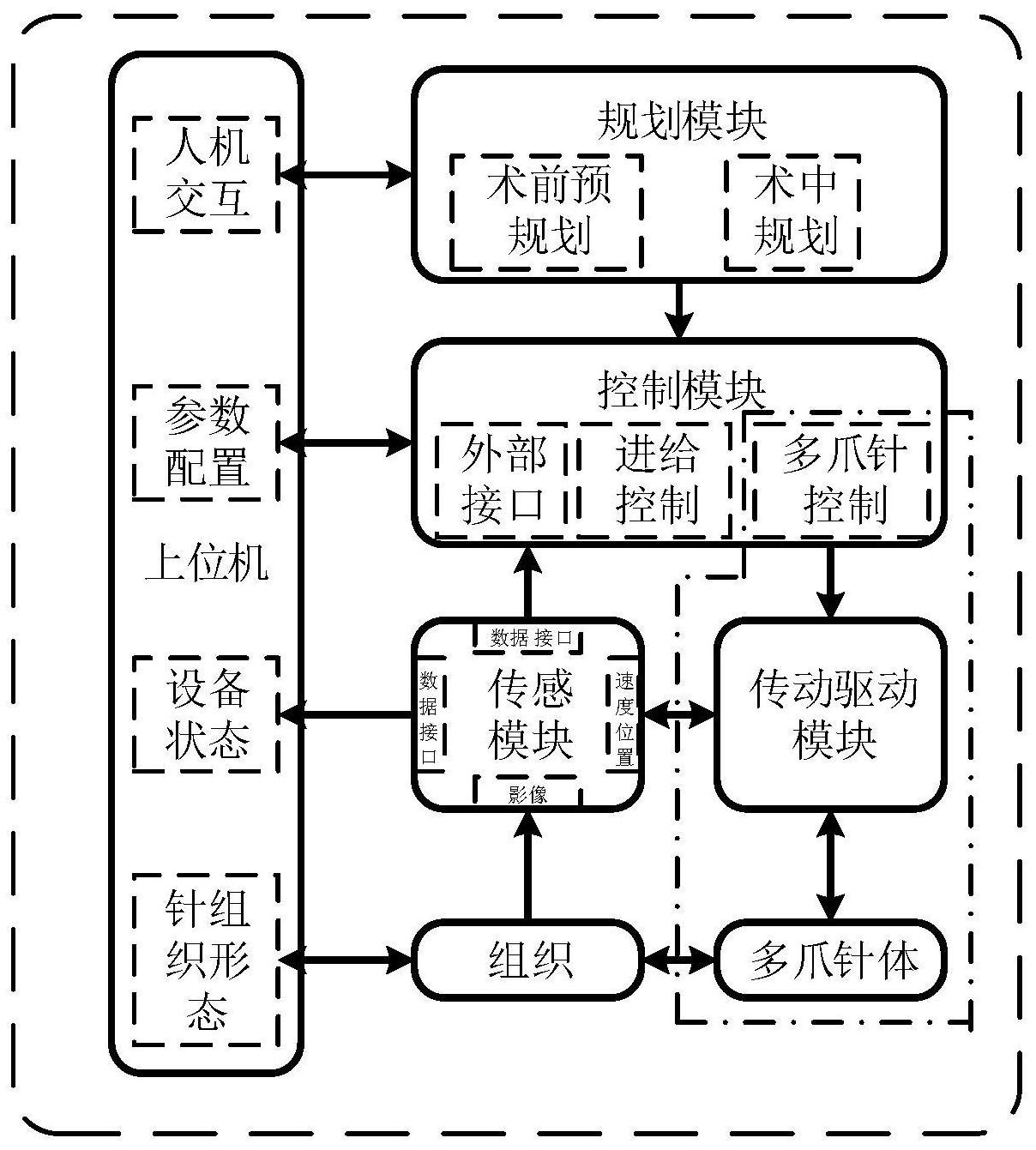
本发明的目的是针对穿刺针的精准操控需求,提出一种基于数据驱动算法的实现 自动控制的多爪针自动穿刺控制装置,并开发了对应的控制方法,以克服穿刺过程的环境 干扰,提高穿刺定位精度。 本发明提供了一种基于无模型自适应算法的多爪针自动穿刺控制装置,包括控制 模块和执行机构。其中,控制模块包括微处理单元和电机控制单元;微处理单元用于解析上 位机传输来的路径跟踪控制指令,生成电机控制量,输出给电机控制单元;电机控制单元对 电机控制量进行放大,输出给执行机构;所述的执行机构包括传动驱动模块和多爪针体;传 动驱动模块包括传动机构和驱动电机,多爪针体通过传动机构与驱动电机连接,驱动电机 根据电机控制量,驱动多爪针体运动;多爪针体包括刚性主针和柔性子针束,子针束在非工 作状态嵌套在主针内,在工作状态时,主针的驱动电机推动主针打开导向缝,子针束的驱动 电机控制各柔性子针伸缩,使子针呈发散状作用于靶点位置。 本发明提供的一种基于无模型自适应算法的多爪针自动穿刺的控制方法,包括如 下: 步骤1,多爪针自动穿刺控制装置从传感器获取主针和所有子针的针尖位置、电机 位置,从上位机的指令中获取期望的针尖位置,并输出电机控制量; 其中,将电机控制量表示为输入物理量u(k),u(k)包括k时刻的主针、各子针束的 驱动电机的位置控制量;将k时刻的主针和所有子针的针尖位置表示为输出物理量y(k);将 历史的输出物理量和输入物理量与下一时刻的输出物理量,用多输入多输出的非线性离散 时间系统表示; 步骤2,将步骤1的非线性离散时间系统转化为紧格式动态性线性化数据模型; 5 CN 111584061 A 说 明 书 2/6 页 步骤3,为了保证获得期望的输出物理量,设计控制输入准则函数来获取控制律; 控制律如下: 其中,u(k-1)为k-1时刻的输入物理量;权重因子λ>0;步长因子ρ∈(0,1];y*(k 1) 为期望的k 1时刻的输出物理量;Φc(k)为非线性离散时间系统在k时刻的伪雅克比矩阵; 为矩阵Φc(k)的转置; 步骤4,估计伪雅克比矩阵Φc(k); 步骤5,根据伪雅克比矩阵的估计值 获取k时刻的控制律: 其中, 是矩阵 的转置; 计算出的u(k)就是控制模块在k时刻输出的电机控制量。 相对于现有技术,本发明的优点和积极效果在于: (1)本发明实现了一种多爪针自动穿刺控制装置及控制方法,目前多爪针是手动 控制的,大大影响穿刺精度,本发明实现了多爪针的自动控制,通过控制电机和齿轮实现多 爪针主针和各子针的前进和伸缩。 (2)本发明对多爪针的自动穿刺控制方法,避免了多爪针在组织内运动模型较难 建立的问题,对多爪针的电机驱动无需建模,降低了对模型的依赖性,建立了基于自动穿刺 辅助装置,精确控制自动多爪针完成软组织穿刺,改进了人工穿刺的不确定性,提高了对复 杂环境的适应性。 附图说明 图1为本发明的自动穿刺系统的组成结构原理图; 图2为本发明的多爪针体的结构示意图; 图3为本发明的自动控制多爪针的系统原理图; 图4为本发明的基于MFAC自动多爪针控制方法的示意图。











