
技术摘要:
本发明公开了一种陆空两用无人车,属于无人机在侦查与救援应用的技术领域,包括机体,所述机体上布置有多个机架,各所述机架的一端分别通过折叠装置安装有涵道风扇且各个涵道风扇的外围环括上均设有行走机构,各所述涵道风扇和行走机构分别配设有驱动其工作的动力源; 全部
背景技术:
在现有技术中,室内侦查与救援时,对于四轴飞行器的应用较为广泛,四旋翼飞行 器是一种较为常见和经典的小型飞行器,广泛用于军事侦察、资源勘测、民用航拍等技术领 域。该飞行器结构紧凑、运动灵活,适宜在狭小空间或复杂环境中使用,在一些特定情况下 需要飞行器着陆侦察,如楼宇内部、草丛树林内部等狭小空间。但在实际运用过程中,若采 用四轴飞行器,则存在着噪音大、易受气流干扰以及运动控制精度低等缺点,很大程度限制 了四轴飞行器的应用场景。 在室外大范围机动中,无人车辆的速度与越障能力较差,导致在室外的机动范围 较窄、受地形限制且机动速度较慢,无法满足在室外执行大范围的侦查和救援任务。
技术实现要素:
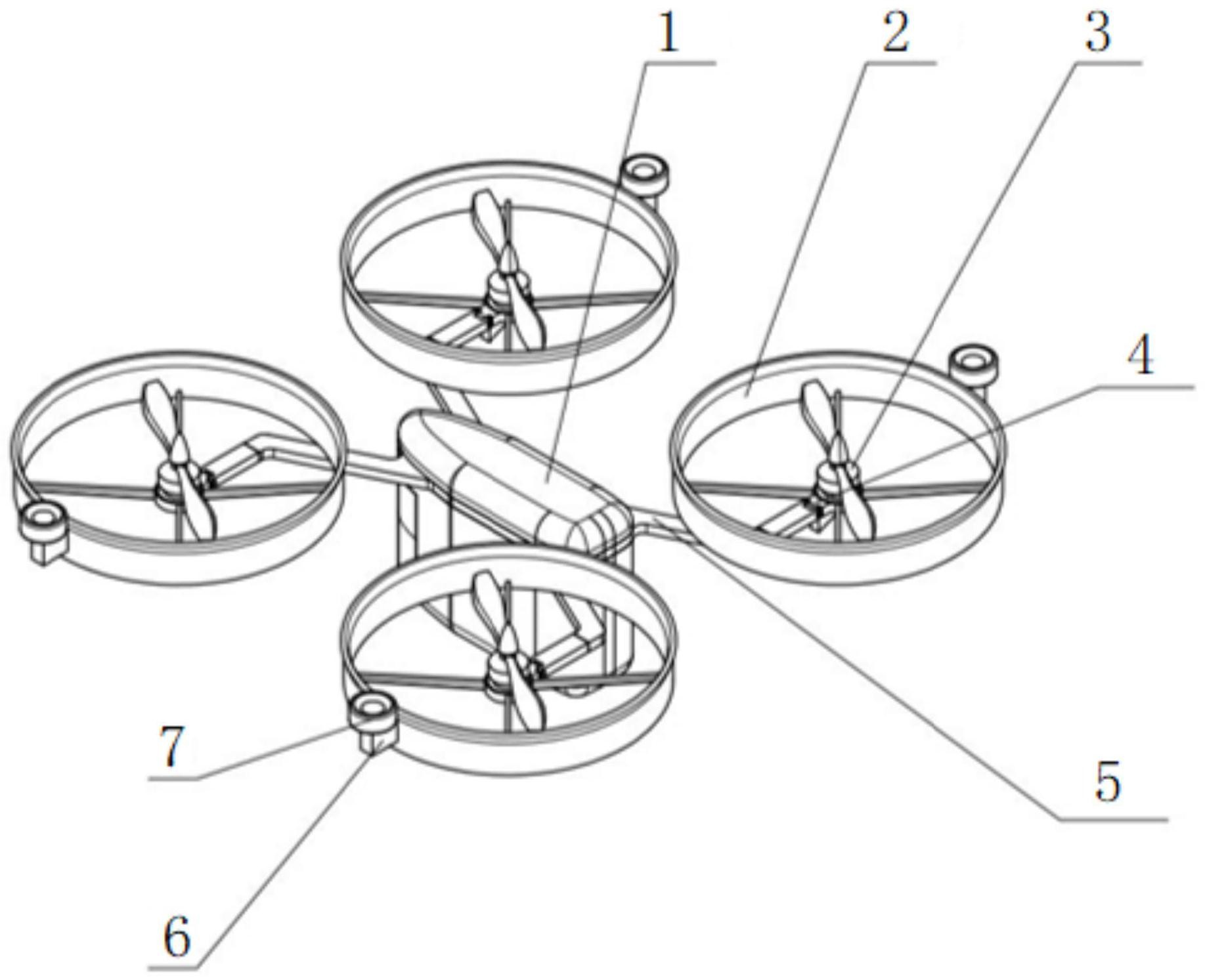
鉴于此,为了解决现有技术存在的上述问题,本发明的目的在于提供一种陆空两 用无人车以达到通过在行走模式和飞行模式之间自由切换,以满足室内或室外在侦查和救 援过程中的不同需求且提高了适用场景范围的目的。 本发明所采用的技术方案为:一种陆空两用无人车,包括机体,所述机体上布置有 多个机架,各所述机架的一端分别通过折叠装置安装有涵道风扇且各个涵道风扇的外围环 括上均设有行走机构,各所述涵道风扇和行走机构分别配设有驱动其工作的动力源;各所 述折叠装置驱动与其对应的涵道风扇并使各所述涵道风扇同步切换为水平状态或竖直状 态,当切换为竖直状态时,各所述行走机构同时触地。 进一步地,还包括设于机体上的起落架和驱动该起落架动作的B舵机,所述起落架 的一端设于机体内,另一端在B舵机的驱动下伸出该机体的底部或回缩至该机体内,当由飞 行模式转换为行走模式时,先将起落架伸出以支撑无人机,再回缩直至各个行走机构触地 以实现无人车在地面上行驶;当由行走模式转换为飞行模式时,则需将起落架伸出,以支撑 无人车并确保顺利起飞。 进一步地,所述折叠装置配设有驱动其动作的A舵机,各所述涵道风扇和行走机构 分别配设有驱动其工作的A电机和B电机;还包括设于机体内的控制模块,该控制模块分别 与A舵机、B舵机、A电机和B电机通信连接,以在控制模块的控制指令作用下,实现A舵机、B舵 机、A电机和B电机的协调动作,进而实现无人车在飞行模式或行走模式下的正常运行。 进一步地,所述控制模块包括电池、接收机、行走控制器和飞控,所述电池用于为 接收机、行走控制器和飞控供电; 所述接收机连接有地面站,且接收机用于接收地面站发出的飞行姿态指令并将飞 行姿态指令发送给飞控或行走控制器; 3 CN 111591438 A 说 明 书 2/6 页 所述飞控将接收的飞行姿态指令解算为各所述A电机的转速信息; 所述行走控制器将接收的飞行姿态指令解算为各所述B电机的转速信息; 以通过接收机实时接收由地面站所发出的飞行姿态指令,在行走控制器和飞控的 作用下能够分别对行走模式和飞行模式下的陆空两用无人车进行准确控制。 进一步地,所述控制模块还包括A电调和B电调,所述A电调和B电调均由所述电池 供电,且A电调在飞控的控制下调节各所述A电机的转速,B电调在行走控制器的控制下调节 各所述B电机的转速,在A电调的作用下能够精确调节各个A电机的转速,有利于进一步精确 控制飞行模式下的陆空两用无人车,同理,在B电调的作用下能够精确调节各个B电机的转 速,有利于进一步精确控制行走模式下的陆空两用无人车。 进一步地,所述行走控制器和飞控设于所述机体的内部上方,且电池设于所述机 体的内部下方,由于将重量较小的行走控制器和飞控设置于机体内部的上方,将重量较大 的电池位于机体内部下方,有利于降低该陆空两用无人车的重心,从而有利于在行走模式 下维持稳定。 进一步地,所述行走机构包括行走轮,所述行走轮的转动轴线与所述涵道风扇的 转动轴线相平行且行走轮配连接有驱动其转动的所述B电机,以实现在B电机的作用下驱动 各个行走轮转动,进而实现无人车在行走模式下能够正常行驶。 进一步地,所述机体设为呈左右对称的壳体结构,该壳体结构的一端呈流线形,能 够显著降低气流干扰,并保持在飞行模式下的平稳性。 进一步地,各所述机架分为前端机架和后端机架,前端机架对称布置于所述壳体 机构上靠近流线形的一端,后端机架对称布置于所述壳体机构上远离该流线形的一端,以 实现将各个涵道风扇对称分布在机体的周围,进而确保在飞行模式下无人车的飞行稳定 性。 进一步地,所述机体的底部设有检修窗口,以便于检修控制模块以及更换电池,确 保无人车的安全运行。 本发明的有益效果为: 1 .采用本发明所提供的陆空两用无人车,各个涵道风扇在所述折叠装置驱动下, 能够同步切换成水平状态或竖直状态,同时,各所述涵道风扇上的行走机构也能同时触地, 以实现将无人车在行走模式和飞行模式之间自由切换,进而在需要进行室内侦查与救援 时,则使用行走模式;在需要进行室外机动时,则使用飞行模式,以此同时具有室内运动控 制精确、噪音低且不易受气流干扰以及室外机动范围广、不受地形限制且机动速度快的优 点,为室内外使用提供强有力的工具,提升了无人车的应用场景适应性。 2.采用本发明所提供的陆空两用无人车,在其运行过程中,一方面,其在行走模式 和飞行模式是分别通过行走机构和涵道风扇,而行走机构和涵道风扇的运行是相互独立的 系统,在运行时,能够同时兼顾飞行时需要高转速低扭矩、行走时需要低转速高扭矩的需 求,进而使其在飞行与陆地行走时都具有良好的性能;另一方面,在行走模式时,由于涵道 风扇具有涵道的环括,其对旋翼具有良好的保护作用,同时,由于飞行动力系统和陆地行走 动力系统相互独立,在陆地行走时,旋翼并不会旋转,因此,旋翼在陆地行走状态下不易受 到损伤,具有更长的使用寿命。 4 CN 111591438 A 说 明 书 3/6 页 附图说明 图1是本发明提供的陆空两用无人车在飞行模式下的整体示意图; 图2是本发明提供的陆空两用无人车由飞行模式向行走模式转换的一个状态切换 示意图; 图3是本发明提供的陆空两用无人车由飞行模式向行走模式转换的另一个状态切 换示意图; 图4是本发明提供的陆空两用无人车在行走模式下的整体示意图; 附图中标注如下: 1-机体,2-涵道风扇,3-A电机,4-折叠装置,5-机架,6-B电机,7-行走轮,8-起落 架。











