
技术摘要:
本发明公开了一种基于可伸缩挂轨机器人的船舶靠岸侧水尺图像采集系统及方法,包括带有水尺标志的船舶,还包括:可伸缩挂轨机器人水尺图像采集装置,用于采集船舶靠岸侧水尺图像;手持式管控装置,用于人工现场引领采集位置、设置安全距离和遥控可伸缩挂轨机器人水尺图 全部
背景技术:
在船舶水尺计重操作中,船舶吃水值的精准测量是影响水尺计重准确性最为关键 的因素。水尺测量通常需要商检人员、收货方和船方三方人员通过租用小船或者攀爬软梯 分别接近船舶艏、舯、艉水尺标志,目测船舶吃水值。由于小船稳定性差且水边设备腐蚀严 重,特别是船舶靠岸侧空间狭小,易发生船舶碰撞,人员安全受到极大威胁;此外通过小船 或者攀爬软梯目测吃水值需时较长,船舶滞期费增加,损害收货方利益。在某些靠泊码头, 商检人员、收货方和船方三方人员站在码头上目测船舶靠岸侧吃水值,但是由于俯视测量 时水尺标志发生不同程度的变形且视线并不水平,测量值误差较大,目测结果往往存在较 大争议。 随着科学技术的发展,机器视觉技术和机器人技术获得了长足进步,已在船舶水 尺计重领域应用。 公开号为CN102785719A的中国专利公开了一种用于船舶水尺图像拍摄的爬壁机 器人、系统及方法,用于自动准确采集船舶水尺图像,但是由于爬壁机器人位于船体上且与 水面距离难以控制,图像采集镜头面临极大的损坏风险;公开号为CN102975826A的专利申 请公开了一种基于机器视觉的便携式船舶水尺自动检测和识别方法,可以实现水尺数据的 自动读取,但是需要人员携带摄像机拍摄水尺视频;公开号为CN107340031A的专利申请公 开了一种基于无人机的船舶水尺计量系统及方法,但是船舶靠岸侧空间狭小,无人机难以 稳定飞行,存在极大的坠机风险。 随着机器人技术、定位技术、机器视觉技术和通信技术的发展和日益进步,通过现 场人工遥控、远程操控和自主控制方式来获取和传输水尺图像已经成为可能。利用可伸缩 挂轨机器人在不同作业场景下通过现场人工遥控、远程操控和自主控制的方式可在任何水 位时远距离获取高清水尺图像,并可远程调整图像采集位置和角度保证水尺图像的采集质 量,为靠岸侧水尺图像的采集提供一种安全、准确、方便、快捷的采集手段,提高船舶水尺计 重的自动化和智能化水平。
技术实现要素:
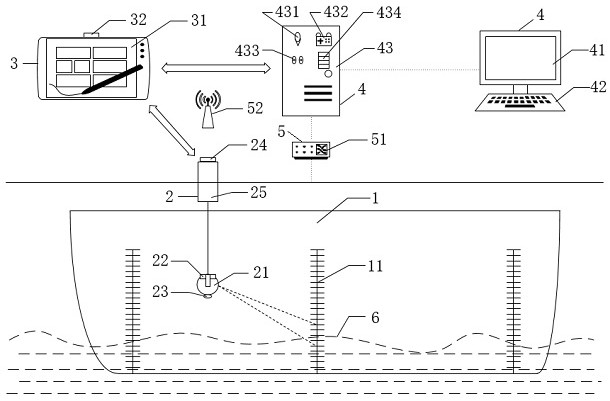
本发明的目的在于克服现有技术中存在的上述不足,而提供一种基于可伸缩挂轨 机器人的船舶靠岸侧水尺图像采集系统及方法。 本发明解决上述问题所采用的技术方案是:一种基于可伸缩挂轨机器人的船舶靠 岸侧水尺图像采集系统,包括带有水尺标志的船舶,其特征是,还包括: 4 CN 111591403 A 说 明 书 2/5 页 可伸缩挂轨机器人水尺图像采集装置,用于采集船舶靠岸侧水尺图像; 手持式管控装置,用于人工现场引领采集位置、设置安全距离和遥控可伸缩挂轨机器 人水尺图像采集装置的姿态; 平台管控装置,用于远程遥控可伸缩挂轨机器人水尺图像采集装置的姿态,存储水尺 图像; 通讯装置,用于图像信息和控制信号的传输; 所述可伸缩挂轨机器人水尺图像采集装置通过通讯装置分别与手持式管控装置和平 台管控装置连接。 进一步的,所述可伸缩挂轨机器人水尺图像采集装置包括摄像头、旋转云台、超声 测距传感器、一号定位装置和可伸缩挂轨机器人,所述摄像头与旋转云台连接,所述超声测 距传感器与摄像头接触,所述一号定位装置和旋转云台与可伸缩挂轨机器人连接;所述摄 像头用于对水尺图像进行采集,所述旋转云台用于控制摄像头的采集角度,所述超声测距 传感器用于测量摄像头和水面的距离,所述一号定位装置用于采集可伸缩挂轨机器人的位 置信息,所述可伸缩挂轨机器人用于搭载摄像头、旋转云台、超声测距传感器和一号定位装 置在水平方向和竖直方向移动。 进一步的,所述手持式管控装置包括手持终端和二号定位装置,所述二号定位装 置与手持终端连接,所述手持终端用于实时展示摄像头采集的图像和可伸缩挂轨机器人水 尺图像采集装置的各参数信息用以现场遥控可伸缩挂轨机器人和旋转云台的姿态、根据水 面浪高设置摄像头与水面的安全距离,所述二号定位装置用于采集手持终端的位置信息用 以引领可伸缩挂轨机器人的采集位置。 进一步的,所述平台管控装置包括信息展示装置、手动操控台和服务器,所述展示 装置(41)和手动操控台与服务器连接,所述信息展示装置用于实时展示摄像头采集的图像 和可伸缩挂轨机器人水尺图像采集装置的各参数信息,所述手动操控台用于远程遥控可伸 缩挂轨机器人和旋转云台的姿态,所述服务器包括位置匹配单元、设备控制单元、水尺标志 识别单元和存储单元。 进一步的,所述通讯装置包含光电转换装置和无线通讯装置,用于实现图像信息 和控制信号的传输。 所述的基于可伸缩挂轨机器人的船舶靠岸侧水尺图像采集系统的船舶靠岸侧水 尺图像采集方法,其特征是,所述可伸缩挂轨机器人水尺图像采集装置,进行船舶靠岸侧水 尺图像采集;所述手持式管控装置,进行人工现场遥控采集水尺图像;所述平台管控装置, 进行水尺图像的人工远程遥控采集、规定采集和自主采集;所述通讯装置,进行图像信息和 控制信号的传输。 进一步的,一号定位装置和二号定位装置将所采集的位置信息实时传送至服务器 的位置匹配单元,位置匹配单元对比一号定位装置和二号定位装置的位置,对比结果发送 至设备控制单元,设备控制单元向可伸缩挂轨机器人发送控制信号使其在水平方向上沿着 轨道向手持终端靠近,直至可伸缩挂轨机器人和手持终端在水平方向上的位置重合; 设备控制单元接收来自于位置匹配单元和手动操控台的控制信息,操作旋转云台的旋 转角度和可伸缩挂轨机器人的水平和下探运动; 水尺标志识别单元实时识别摄像头画面的水尺标志,在自主采集模式下,当画面中的 5 CN 111591403 A 说 明 书 3/5 页 水尺标志与画面的中心部位重合时,水尺标志识别单元向设备控制单元发送信号。 进一步的,水尺计重人员根据信息展示装置实时展示的图像和可伸缩挂轨机器人 水尺图像采集装置的各参数信息,远程手动控制旋转云台的旋转角度和可伸缩挂轨机器人 的水平和下探运动进行水尺图像采集。 进一步的,水尺计重人员预设可伸缩挂轨机器人的采集位置,并根据水面水位和 浪高设置摄像头与水面的距离,可伸缩挂轨机器人自动到规定位置下探至摄像头与水面的 规定距离进行水尺图像采集。 进一步的,船舶靠泊后,可伸缩挂轨机器人搭载旋转云台、超声测距传感器和摄像 头下探至距水面默认的安全距离,可伸缩挂轨机器人从轨道的一端移动至另一端,在移动 过程中当摄像头画面的中心部位与水尺标志重合时可伸缩挂轨机器人暂停移动,摄像头采 集水尺图像,图像采集在该位置完成后可伸缩挂轨机器人继续向轨道另一端移动,直到移 动至轨道另一端为止。 本发明与现有技术相比,具有以下优点和效果:本发明基于可伸缩挂轨机器人技 术进行船舶靠岸侧水尺图像的远程采集,可替代人工进入靠岸侧水面区域采集水尺图像, 也可保障设备的安全稳定运行,避免设备损毁,保证人员和设备的安全;在不同作业场景 下,可通过水尺图像的人工远程遥控采集、规定采集和自主采集方式获取任何水位时的远 距离高清水尺图像;采集手段更加安全、准确、方便、快捷,提高了船舶水尺计重的自动化和 智能化水平。 附图说明 图1是本发明实施例的系统结构示意图。 图中:船舶1、水尺标志11、可伸缩挂轨机器人水尺图像采集装置2、摄像头21、旋转 云台22、超声测距传感器23、一号定位装置24、可伸缩挂轨机器人25、手持式管控装置3、手 持终端31、二号定位装置32、平台管控装置4、信息展示装置41、手动操控台42、服务器43、位 置匹配单元431、设备控制单元432、水尺标志识别单元433、存储单元434、通讯装置5、光电 转换装置51、无线通讯装置52、吃水线6。











