
技术摘要:
本申请涉及一种时空标定的方法、系统、计算机设备和存储介质,其中,该时空标定的方法包括:根据OTS的刚体坐标,确定第一变换、第二变换、第三变换和空间标定的约束条件,并将该空间标定初始化为预设矩阵;该第二变换和该第三变换用于约束时间标定;遍历该时间标定,根 全部
背景技术:
目前,为了跟踪预定物体的位置,通常使用光学追踪系统(optical tracking system,简称为OTS);OTS和相机可以应用在诸如AR系统或机器人等装备中,用于实时跟踪 标的物。为了提高AR系统或机器人估计的准确性和鲁棒性,该OTS和该相机必须在空间和时 间上相对于彼此对齐。在相关技术中,通常通过手眼标定等方法解决空间标定的问题,但上 述方法通常应用于相机之间的标定,或应用于惯性传感器与激光雷达之间的标定;并且,由 于OTS只有位姿观测,在相关技术中,OTS和相机之间的时空标定无法精确确定,从而导致在 OTS和相机中时空标定的准确性较低。 针对相关技术中,在OTS和相机中时空标定的准确性较低的问题,目前尚未提出有 效的解决方案。
技术实现要素:
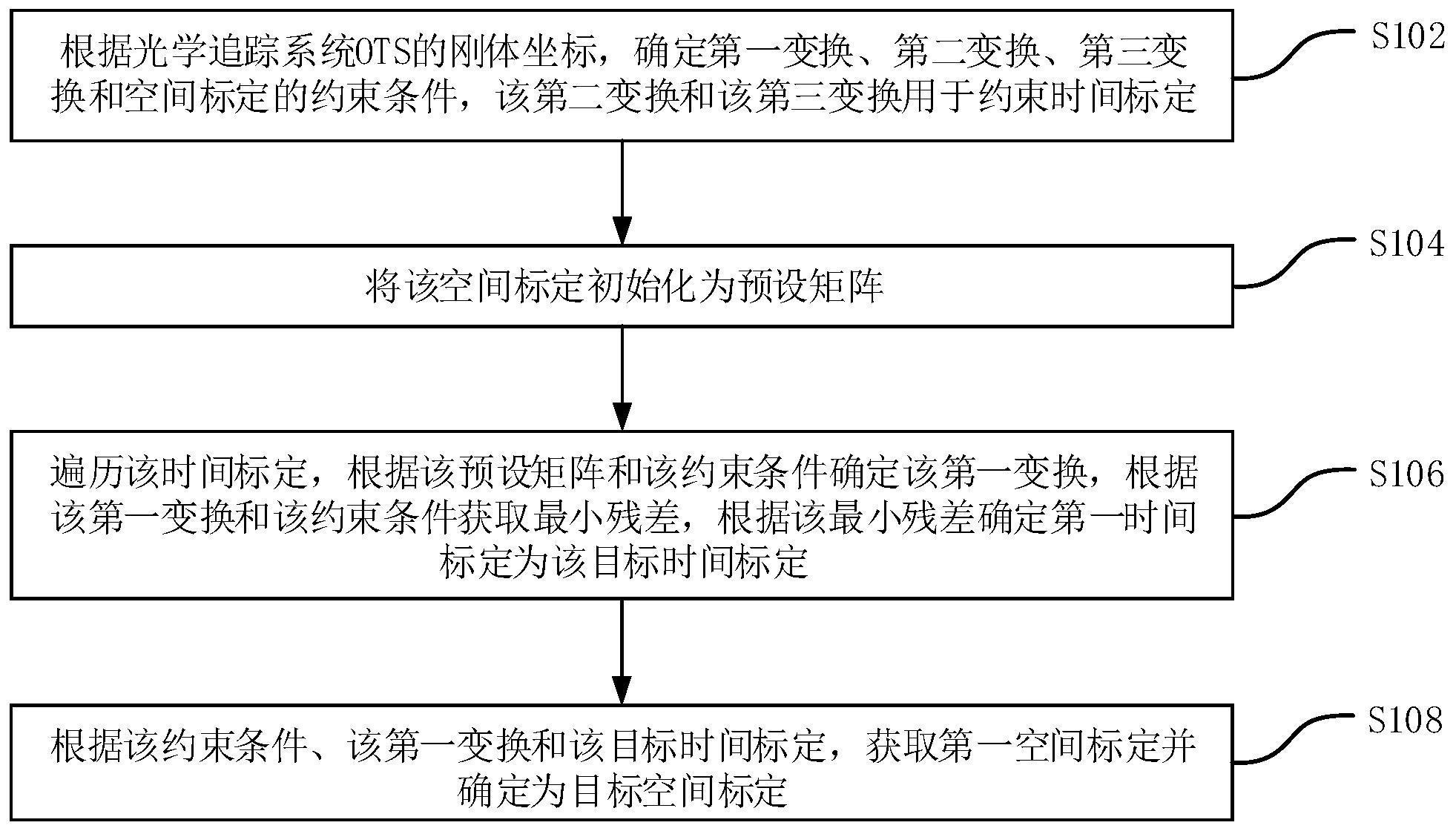
本申请实施例提供了一种时空标定的方法、系统、计算机设备和存储介质,以至少 解决相关技术中在OTS和相机中时空标定的准确性较低的问题。 第一方面,本申请实施例提供了一种时空标定的方法,所述方法包括: 根据OTS的刚体坐标,确定第一变换、第二变换、第三变换和空间标定的约束条件, 并将所述空间标定初始化为预设矩阵;所述第二变换和所述第三变换用于约束时间标定; 其中,所述第一变换为OTS全局坐标系到相机全局坐标系的变换,所述第二变换为 所述OTS局部坐标系到全局坐标系的位姿变换,所述第三变换为相机局部坐标系到全局坐 标系的位姿变换; 遍历所述时间标定,根据所述预设矩阵和所述约束条件确定所述第一变换,根据 所述第一变换和所述约束条件获取最小残差,根据所述最小残差确定第一时间标定为目标 时间标定; 根据所述约束条件、所述第一变换和所述目标时间标定,获取第一空间标定并确 定为目标空间标定。 在其中一些实施例中,所述遍历所述时间标定,根据所述预设矩阵和所述约束条 件确定所述第一变换,根据所述第一变换和所述约束条件获取最小残差,根据所述最小残 差确定第一时间标定为目标时间标定包括: 根据第一遍历间隔,遍历所述时间标定,根据所述预设矩阵和所述约束条件获取 所述第一变换,并根据所述第一变换确定所述第一时间标定; 在所述第一时间标定大于或者等于第一预设阈值的情况下,根据第二遍历间隔, 遍历所述时间标定,并重新确定第二时间标定;其中,所述第二遍历间隔小于所述第一遍历 4 CN 111583344 A 说 明 书 2/10 页 间隔,所述第二时间标定的精度高于所述第一时间标定的精度; 在所述第二时间标定小于所述第一预设阈值的情况下,确定所述第二时间标定为 所述目标时间标定。 在其中一些实施例中,所述根据所述约束条件、所述第一变换和所述目标时间标 定,获取所述第一空间标定并确定为目标空间标定之后,所述方法还包括: 根据所述约束条件和所述第一空间标定,再次遍历所述时间标定,根据遍历获取 的所述第一变换确定第三时间标定,将所述第三时间标定重新确定为所述目标时间标定; 其中,所述第三时间标定的精度高于所述第二时间标定的精度。 在其中一些实施例中,所述根据所述约束条件、所述第一变换和所述目标时间标 定,获取所述第一空间标定并确定为目标空间标定之后,所述方法还包括: 根据所述第一空间标定,迭代遍历所述时间标定,并根据所述约束条件重新确定 第四时间标定和第二空间标定; 在迭代次数大于或等于第二预设阈值,或者所述最小残差小于或等于第三预设阈 值的情况下,停止所述迭代,并将所述第四时间标定重新确定为所述目标时间标定,将所述 第二空间标定重新确定为所述目标空间标定。 在其中一些实施例中,所述遍历所述时间标定,根据所述预设矩阵和所述约束条 件确定所述第一变换包括: 获取遍历过程中的所述第二变换和所述第三变换;根据所述第二变换、所述第三 变换和所述预设矩阵,获取所述第一变换;其中,所述第二变换和所述第三变换均用 translation部分约束。 在其中一些实施例中,所述根据所述预设矩阵和所述约束条件确定所述第一变换 包括: 根据所述预设矩阵和所述约束条件,通过迭代最近点(Iterative Closest Point,简称为ICP)算法获取所述第一变换。 在其中一些实施例中,所述获取第一空间标定并确定为目标空间标定之后,所述 方法还包括: 根据所述目标时间标定和所述目标空间标定,获取视觉同时定位与建图(Visual Simultaneous Localization And Mapping,简称为VSLAM)算法在所述OTS全局坐标系下的 输出轨迹;通过所述输出轨迹和所述OTS的轨迹观测,获取所述VSLAM算法的轨迹精度评估。 第二方面,本申请实施例提供了一种时空标定的系统,所述系统包括:相机、OTS和 控制装置; 所述控制装置根据所述OTS的刚体坐标,确定第一变换、第二变换、第三变换和空 间标定的约束条件,并将所述空间标定初始化为预设矩阵;其中,所述第二变换和所述第三 变换用于约束时间标定; 其中,所述第一变换为OTS全局坐标系到相机全局坐标系的变换,所述第二变换为 所述OTS局部坐标系到全局坐标系的位姿变换,所述第三变换为相机局部坐标系到全局坐 标系的位姿变换; 所述控制装置遍历所述时间标定,根据所述预设矩阵和所述约束条件确定所述第 一变换,根据所述第一变换和所述约束条件获取最小残差,根据所述最小残差确定第一时 5 CN 111583344 A 说 明 书 3/10 页 间标定为目标时间标定; 所述控制装置根据所述约束条件、所述第一变换和所述目标时间标定,获取第一 空间标定并确定为目标空间标定。 第三方面,本申请实施例提供了一种计算机设备,包括存储器、处理器以及存储在 所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时 实现如上述第一方面所述的时空标定的方法。 第四方面,本申请实施例提供了一种计算机可读存储介质,其上存储有计算机程 序,该程序被处理器执行时实现如上述第一方面所述的时空标定的方法。 相比于相关技术,本申请实施例提供的时空标定的方法、系统、计算机设备和存储 介质,通过根据OTS的刚体坐标,确定第一变换、第二变换、第三变换和空间标定的约束条 件,并将该空间标定初始化为预设矩阵;该第二变换和该第三变换用于约束时间标定;其 中,该第一变换为OTS全局坐标系到相机全局坐标系的变换,该第二变换为所述OTS局部坐 标系到全局坐标系的位姿变换,该第三变换为相机局部坐标系到全局坐标系的位姿变换; 遍历该时间标定,根据该预设矩阵和该约束条件确定该第一变换,根据该第一变换和该约 束条件获取最小残差,根据该最小残差确定第一时间标定为目标时间标定;根据该约束条 件、该第一变换和目标时间标定,获取第一空间标定并确定为目标空间标定,解决了在OTS 和相机中时空标定的准确性较低的问题。 本申请的一个或多个实施例的细节在以下附图和描述中提出,以使本申请的其他 特征、目的和优点更加简明易懂。 附图说明 此处所说明的附图用来提供对本申请的进一步理解,构成本申请的一部分,本申 请的示意性实施例及其说明用于解释本申请,并不构成对本申请的不当限定。在附图中: 图1是根据本申请实施例的时空标定方法的流程图一; 图2是根据本申请实施例的时空标定方法的流程图二; 图3是根据本申请实施例的时空标定方法的流程图三; 图4是根据本申请实施例的时空标定方法的流程图四; 图5是根据本申请实施例的时空标定方法的流程图五; 图6是根据本申请实施例的时空标定系统的结构框图; 图7是根据本申请实施例的计算机设备的硬件结构示意图。











