
技术摘要:
本申请涉及海量点云空间索引构建方法、装置、构建设备。本申请通过目标对象输入的配置内容在存储区中设置若干个层级,采用对存储区预分层和各层分块对点云数据的采样点的空间索引信息进行构建,当某一层级(不是最稀疏的层级)出现饱和时,代表该层级当前存储的采样点 全部
背景技术:
LiDAR(Light Detection And Ranging)激光雷达探测技术,是近十年开始应用并 快速发展的一种新兴的三维数据获取技术。它能够快速获取物体表面的三维坐标数据、强 度、颜色等丰富的信息。一方面随着激光雷达扫描仪设备技术的发展,扫描设备在获取效 率、数据密集度、数据精度以及数据总量上都有了很大的提升。常用的扫描设备每秒均能产 生成千上万个点,每次扫描获取的采样点数能达到数十万或数百万,数据量达几十至几百G 甚至达到TB级的点云数据,而为了方便对单个采样点的读取,需要对每个采样点建立索引 信息。 但是,发明人在研究过程中发现,现有技术构建点云数据空间索引信息需要预知 点云的整体信息,而点云整体信息往往需要遍历全部采样点才能确定,所以导致构建空间 索引信息的效率低下。
技术实现要素:
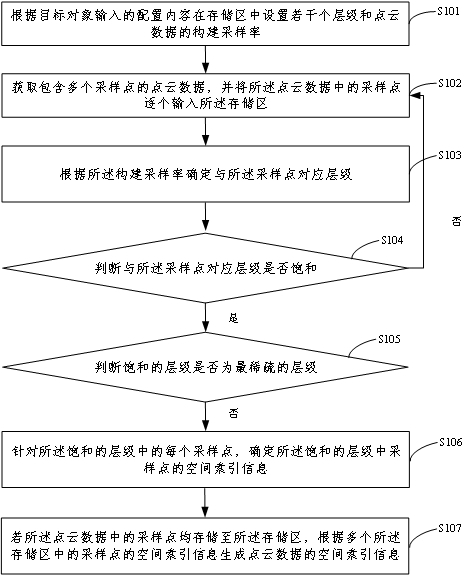
为了解决上述现有技术中对每个点的邻域特征进行分析的方式,只考虑到了局部 信息,从而影响对点分类的精确度的技术问题,本申请提供了一种海量点云空间索引构建 方法、装置、构建设备。 第一方面,本申请提供了一种海量点云空间索引构建方法,所述方法包括: 根据目标对象输入的配置内容在存储区中设置若干个层级和点云数据的构建采样率; 获取包含多个采样点的点云数据,并将所述点云数据中的采样点逐个输入所述存储 区; 根据所述构建采样率确定与所述采样点对应层级; 判断与所述采样点对应层级是否饱和; 若与所述采样点对应层级已饱和,判断饱和的层级是否为最稀疏的层级; 若所述饱和的层级不是最稀疏的层级,针对所述饱和的层级中的每个采样点,确定所 述饱和的层级中采样点的空间索引信息,所述空间索引信息用于表示所述采样点在所述存 储区内的位置; 若所述点云数据中的采样点均存储至所述存储区,根据多个所述存储区中的采样点的 空间索引信息生成点云数据的空间索引信息。 可选地,判断饱和的层级是否为最稀疏的层级的步骤之后,还包括: 若所述饱和的层级是最稀疏的层级,判断所述点云数据中的采样点是否存在未存储至 所述存储区的采样点; 若所述点云数据中有采样点未存储至所述存储区,将最稀疏的层级中的多个所述采样 4 CN 111552765 A 说 明 书 2/10 页 点输出到临时存储区中,并确定所述点云数据的空间索引信息。 可选地,确定所述点云数据的空间索引信息的步骤,包括: 针对所述点云数据中未存储至所述存储区的采样点,重新执行将所述点云数据中的采 样点逐个输入所述存储区的步骤; 若所述点云数据中的采样点均存储至所述存储区,计算所述临时存储区中的采样点个 数与存储区域中采样点个数的和,得到采样点总量; 根据所述采样点总量和所述构建采样率以及最稀疏的层级的预设支持点数信息计算 在所述存储区中设置的目标层级数量; 基于所述目标层级数量确定用于调整所述存储区中层级数量的配置信息; 根据所述配置信息和所述存储区中采样点的空间索引信息生成调整后的空间索引信 息; 根据所述配置信息确定所述未存储至存储区的采样点的空间索引信息; 根据所述调整后的空间索引信息和所述未存储至存储区的采样点的空间索引信息生 成点云数据的空间索引信息。 可选地,其特征在于,根据所述配置信息确定所述未存储至存储区的采样点的空 间索引信息的步骤,包括: 根据所述配置信息调整所述存储区中层级数量,得到新存储区; 将所述临时存储区中的采样点输入所述新存储区,并针对临时存储区中每个所述采样 点,根据所述采样点所在的新存储区中的层级构建所述未存储至存储区的采样点的空间索 引信息。 可选地,确定所述饱和的层级中采样点的空间索引信息的步骤,包括: 获取与所述采样点对应的属性信息; 确定所述采样点所在的存储区的层级,得到存储位置信息; 根据所述属性信息和所述存储位置信息生成所述存储区中采样点的空间索引信息。 可选地,所述属性信息的构建过程包括: 获取预设的自定义属性列表,所述自定义属性列表中包括若干个数据类型和每个类型 对应的占用字节数; 获取与所述采样点对应的自定义信息; 在所述自定义属性列表中确定用于表示所述自定义信息的数据类型信息和数据分量; 根据数据类型信息和数据分量生成所述属性信息。 可选地,在所述自定义属性列表中确定用于表示所述自定义信息的数据类型信息 和数据分量的步骤,包括: 根据自定义信息至少确定一个用于表示自定义内容信息的分量,得到用于表示所述分 量个数的数据分量; 在所述自定义属性列表中确定与每个所述分量对应的数据类型,得到用于表示至少一 个所述分量对应的数据类型的集合的数据类型信息。 第二方面,本申请提供了一种海量点云空间索引构建装置,包括: 设置模块,用于根据目标对象输入的配置内容在存储区中设置若干个层级和点云数据 的构建采样率; 5 CN 111552765 A 说 明 书 3/10 页 获取模块,用于获取包含多个采样点的点云数据,并将所述点云数据中的采样点逐个 输入所述存储区; 第一确定模块,用于根据所述构建采样率确定与所述采样点对应层级; 第一判断模块,用于判断与所述采样点对应层级是否饱和; 第二判断模块,用于若与所述采样点对应层级已饱和,判断饱和的层级是否为最稀疏 的层级; 第二确定模块,用于若所述饱和的层级不是最稀疏的层级,针对所述饱和的层级中的 每个采样点,确定所述饱和的层级中采样点的空间索引信息,所述空间索引信息用于表示 所述采样点在所述存储区内的位置; 生成模块,用于若所述点云数据中的采样点均存储至所述存储区,根据多个所述存储 区中的采样点的空间索引信息生成点云数据的空间索引信息。 第三方面,本申请提供了一种海量点云空间索引构建设备,包括存储器、处理器, 所述存储器中存储有可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程 序时实现上述第一方面任一项所述的方法的步骤。 第四方面,本申请提供了一种具有处理器可执行的非易失的程序代码的计算机可 读介质,所述程序代码使所述处理器执行第一方面任一所述方法。 本申请实施例提供的上述技术方案与现有技术相比具有如下优点:本申请包括通 过根据目标对象输入的配置内容在存储区中设置若干个层级和所述层级的构建采样率;获 取包含多个采样点的点云数据,并将所述点云数据中的采样点逐个输入所述存储区;根据 所述构建采样率确定与所述采样点对应层级;判断与所述采样点对应层级是否饱和;若与 所述采样点对应层级已饱和,判断饱和的层级是否为最稀疏的层级;若所述饱和的层级不 是最稀疏的层级,针对每个所述采样点,确定存储区中采样点的空间索引信息;当所述点云 数据中的多个采样点均输入所述存储区时,根据多个所述存储区中的采样点的空间索引信 息生成点云数据的空间索引信息。 请通过目标对象输入的配置内容在存储区中设置若干个层级,采用对存储区预分 层和各层分块对点云数据的采样点的空间索引信息进行构建,当某一层级(不是最稀疏的 层级)出现饱和时,代表该层级当前存储的采样点可以构建索引,此时无需预知点云的整体 信息,即可通过直接确定采样点在所述存储区内的位置得到各采样点的空间索引信息,提 升了构建空间索引信息的效率。 附图说明 此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本发明的实施 例,并与说明书一起用于解释本发明的原理。 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而 言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。 图1为本申请实施例提供的一种点云数据分类方法的流程图; 图2为本申请实施例提供的图1中步骤S105之后的步骤的流程图; 图3为本申请实施例提供的图2中步骤S202的流程图; 6 CN 111552765 A 说 明 书 4/10 页 图4为本申请实施例提供的图3中步骤S306的流程图; 图5为本申请实施例提供的图1中步骤S106的流程图; 图6为本申请实施例提供的属性信息的构建过程的流程图; 图7为本申请实施例提供的一种构建设备结构示意图。











