
技术摘要:
本发明公开了一种智能水面污物清理无人设备,包括机体和收集箱,收集箱位于机体的下方后侧位置处,机体的底端设有输送机构,输送机构朝向机体的前方倾斜向下分布,输送机构的底面上设有用于抓取水面漂浮物的抓取组件。抓取组件包括动力机构、两个驱动机构和两个卷绕机 全部
背景技术:
自然环境主要是相对社会环境而言的,指的是由水土、地域、气候等自然事物所形 成的环境。自然环境对人的生存、生活具有重要的意义。但是,近年来随着工业的迅猛发展 环境污染问题显得日益突出,环境治理迫不及待。 水体表面污物主要是指漂浮在江、河、湖、海等水体表面上的垃圾,包括垃圾袋、塑 料袋、瓜果、枯枝落叶等生活垃圾,工业区的废弃柴油、机油和居民生活和餐饮生产的食用 油,还包括生长繁殖速度极快的浮萍类漂浮植物。其中,垃圾袋、塑料袋不容易被自然环境 所降解,污染程度尤为严重,需要人们定期对其进行捞取,以保卫环境安全。 在水体表面的垃圾袋捞取的过程中,传统的捞取方法是用竹竿捞取,但是竹竿表 面光滑,摩擦力较小,垃圾袋在捞取的过程中容易滑落。市场上,也存在有专业的打捞清洁 装置,但是,抓取力度不够大,当遇到较大的垃圾袋或垃圾袋内有其他杂物时,难以稳定的 打捞出垃圾袋,存在垃圾袋在捞取的过程中掉落的风险。 尤其是在深水、高山等环境时,作业环境相对较为危险,人为捞取风险过高,因此 如何降低水体表面清污风险,提高作业效率,是目前亟待解决的技术问题。
技术实现要素:
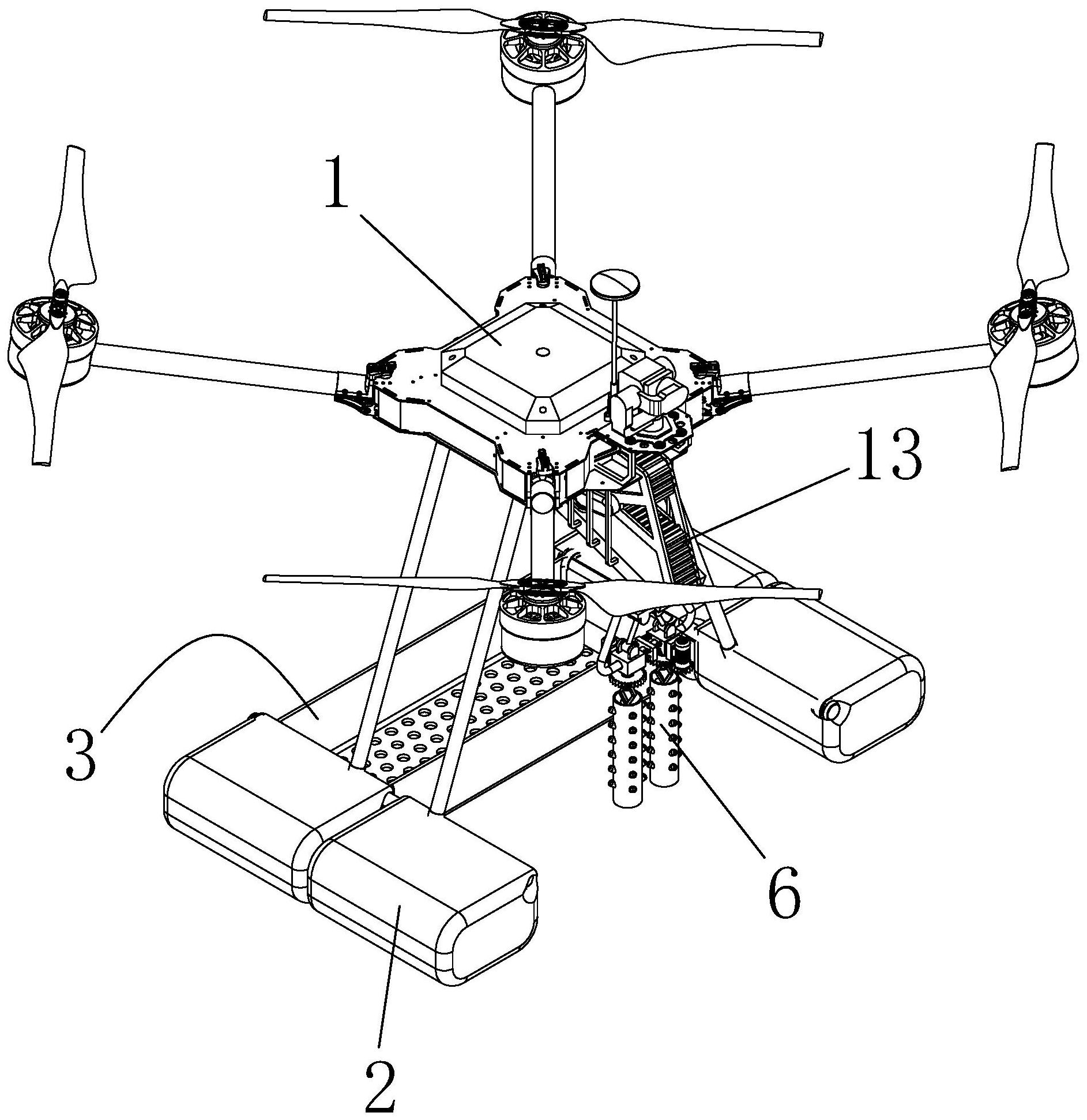
本发明的目的是为了提供一种智能水面污物清理无人设备,本发明使用时启动驱 动机构,驱动机构带动卷绕机构旋转以卷绕水面漂浮物,启动第一伸缩件,第一伸缩件伸长 通过撑开组件带动撑开杆体朝向筒体的外侧伸出,多个撑开杆体的外端撑开并挂住水面漂 浮物,以解决现有的打捞清洁装置的抓取力度不够大,难以稳定的打捞出垃圾袋,存在垃圾 袋在捞取的过程中掉落的风险以及人力捞取风险过高、作业效率低的问题。 为了实现上述发明目的,本发明采用了以下技术方案:一种智能水面污物清理无 人设备,包括机体和收集箱,所述收集箱位于机体的下方后侧位置处,所述机体的底端设有 输送机构,所述输送机构朝向机体的前方倾斜向下分布,所述输送机构的底面上设有用于 抓取水面漂浮物的抓取组件。 所述抓取组件包括动力机构、两个驱动机构和两个卷绕机构,所述动力机构滑动 设置在输送机构的底面上,所述驱动机构和卷绕机构均设置在动力机构上,所述动力机构 能够带动两个卷绕机构相对移动,所述驱动机构能够带动卷绕机构绕自身的轴线旋转; 所述卷绕机构包括筒体、第一伸缩件、撑开组件、活动连接组件和多个撑开杆体,所述 第一伸缩件固定设置在动力机构的底端上,所述撑开组件活动设置在第一伸缩件的底端 上,所述筒体通过轴承转动设置在动力机构的底端上,所述撑开组件位于所述筒体的内部, 且撑开组件沿所述筒体的高度方向分布,所述撑开杆体通过活动连接组件设置在撑开组件 的侧面上,所述撑开杆体倾斜向上分布,且撑开杆体的外端延伸至筒体的外侧。 4 CN 111547240 A 说 明 书 2/7 页 优选的,所述活动连接组件包括互相配合设置的第一滑动件和滑轨,所述撑开杆 体的数量为四个,四个所述撑开杆体中相邻的两个被分为一组,所述撑开杆体的内端转动 设有插杆,两个所述插杆的内端之间设有插套和弹性件,且弹性件位于插套内,所述滑轨固 定在所述插套的内侧,所述第一滑动件和撑开组件活动连接。 优选的,所述撑开组件具有多个菱形结构,所述菱形结构由四个条形板首尾铰接 而成,所述菱形结构的顶端转动设有连接座,所述第一伸缩件的底端和连接座的顶端固定 连接,所述菱形结构的底端和所述筒体的内底面转动连接。 优选的,所述筒体周向开设有多个通孔,且所述撑开杆体滑动设置在通孔内,所述 撑开杆体的横截面为圆形结构。 优选的,所述输送机构包括输送驱动件、导向件、第二滑动件和输送件,所述输送 驱动件、导向件和输送件均设置在机体的底面上,所述导向件朝向机体的前方倾斜向下分 布,所述第二滑动件固定在输送件的底面上,所述输送驱动件能够带动输送件回转,所述输 送件能够带动第二滑动件沿导向件滑动。 优选的,所述动力机构包括封闭型滑轨、第二伸缩件、移动件和第一滑动件,所述 第二伸缩件固定在第二滑动件的底端上,所述封闭型滑轨顶端和第二伸缩件固定连接,所 述封闭型滑轨的底端水平分布,所述移动件固定在第二伸缩件的底端上,所述移动件底面 转动连接有两个拉动件,所述拉动件的底端和第一滑动件转动连接,两个所述驱动机构分 别设置在两个第一滑动件上,所述第一滑动件滑动设置在所述封闭型滑轨的底端上。 优选的,所述封闭型滑轨采用等腰梯形框架型结构,所述封闭型滑轨的横截面为 圆形结构,所述拉动件为倾斜分布的杆体,所述第一滑动件为矩形块体。 优选的,所述驱动机构包括旋转驱动件、主动齿轮和从动齿轮,所述旋转驱动件固 定在第一滑动件的侧面上,所述主动齿轮固定在旋转驱动件的输出轴上,所述从动齿轮固 定在筒体顶端上,且主动齿轮和从动齿轮互相啮合。 优选的,所述机体的底端设有两个漂浮件,所述收集箱固定在两个漂浮件之间,所 述收集箱的底面开设有漏水孔。 优选的,所述漂浮件采用中空的气囊,所述漂浮件的底面采用水平面,所述漂浮件 的底面低于所述收集箱的底面。 与现有技术相比,采用了上述技术方案的智能水面污物清理无人设备,具有如下 有益效果: (一)、启动无人机的机体,机体带着抓取组件朝向水面漂浮垃圾袋移动,输送机构带动 卷绕机构倾斜向下移动并把卷绕机构插入到水面漂浮垃圾袋内,然后启动第二伸缩件,第 二伸缩件的底端缩短并拉动两个第一滑动件互相靠近,第一滑动件带动两个卷绕机构互相 靠近,从而两个卷绕机构互相夹持住水面漂浮垃圾袋,提供预先的夹持力度、确保顺利的夹 持住垃圾袋。 (二)、启动旋转驱动件,旋转驱动件的输出轴发生旋转并通过主动齿轮、从动齿轮 带动卷绕机构旋转以卷绕水面上漂浮的垃圾袋,其中,撑开杆体可以撑开并挂住垃圾袋,进 一步提供卷绕和夹持力度、避免垃圾袋在捞取的过程中掉落。 (三)、启动第一伸缩件,第一伸缩件的底端伸长以挤压撑开组件,撑开组件的两侧 通过活动连接组件带动多个撑开杆体朝向筒体的外侧伸出,从而增加垃圾袋上的撑开挂住 5 CN 111547240 A 说 明 书 3/7 页 的抓取力度,当遇到较大的垃圾袋或垃圾袋内有其他杂物时,能够稳定的打捞出垃圾袋。 (四)、使用无人机打捞水面漂浮垃圾袋,取代人工用竹竿捞取,降低工作人员风 险,同时提高了水体表面污物(尤其是垃圾袋、废弃衣物等)清理效率。 附图说明 图1为本发明智能水面污物清理无人设备实施例一的立体图。 图2为实施例一的立体图(另一视角)。 图3为实施例一的俯视图。 图4为实施例一的主视图。 图5为实施例一的侧视图。 图6为实施例一中抓取组件的立体图。 图7为实施例一中抓取组件的主视图(两个卷绕机构互相远离时)。 图8为实施例一中抓取组件的主视图(两个卷绕机构互相靠近时)。 图9为实施例一中抓取组件的侧视图。 图10为实施例一中动力机构和驱动机构之间的立体图。 图11为实施例一中动力机构和驱动机构之间的俯视图。 图12为实施例一中卷绕机构的主视剖开图。 图13为实施例一中卷绕机构的俯视图。 图14为图13中的A处放大示意图。 图15为实施例二中卷绕机构的主视剖开图。 附图标记:机体1、输送驱动件11、导向件12、第二滑动件121、输送件13、漂浮件2、 收集箱3、动力机构4、封闭型滑轨41、第二伸缩件42、移动件43、拉动件44、第一滑动件45、驱 动机构5、旋转驱动件51、主动齿轮52、从动齿轮53、卷绕机构6、筒体61、通孔611、第一伸缩 件62、连接座621、撑开组件63、第一滑动件64、滑轨65、撑开杆体66、插杆661、插套662、弹性 件663。











