
技术摘要:
巡行可越障的管道巡行系统及机器学习漏液监测系统,属于管道漏液检测领域,为了解决机器人管道巡行越障的问题,包括两个管道巡行机器人,分别为第一巡行机器人和第二巡行机器人,将第一巡行机器人的后立板安装一个舵机,且舵机的摆臂与后立板连接,第二巡行机器人的前 全部
背景技术:
运用先进的电力电子技术、信息技术和智能管理技术,能源互联网将大量由分布 式能量采集装置、分布式能量储存装置和各种类型负载构成的新型电力网络、石油网络、天 然气网络等能源节点互联起来。能源互联网因而实现了能量的双向流动,成为一种能量对 等交换与共享的网络。 能源互联网符合可持续、绿色发展需求,是未来发展的趋势。然而,能源互联网的 发展将带来更大数量且更复杂的能源输送管道,也会带来更繁重的管道检修、监测工作。例 如,整个供热管路的布置、长度、连接节点等复杂程度日益加剧,管道传输漏液问题将变得 日趋严重,自然老化、化学腐蚀等因素可能使管道破裂导致漏液,传统人工监测管道漏液 (包括漏气)的方式将难以满足日益复杂的复合能源供热管路监测需求,小规模的漏液可能 将导致供热效率下降,造成能耗虚高的问题,如发现不及时,将容易导致整个机房汪洋一 片,造成核心部件乃至整个供热系统报废,甚至会造成人员伤亡,造成巨大的经济和社会损 失。 确保复合能源供热项目更安全可靠,加速项目落地,应有针对性的研发配套的漏 液监测系统。而当前监测常用固定在某一位置的如摄像头、各种传感器等等对现场信息采 集,由于管道线路分布情形不同,无法很好满足大面积、长距离的管道监测工作,因而能够 提供一种更为方便的用于移动或定位的管道漏液监测系统,成为迫切需求。
技术实现要素:
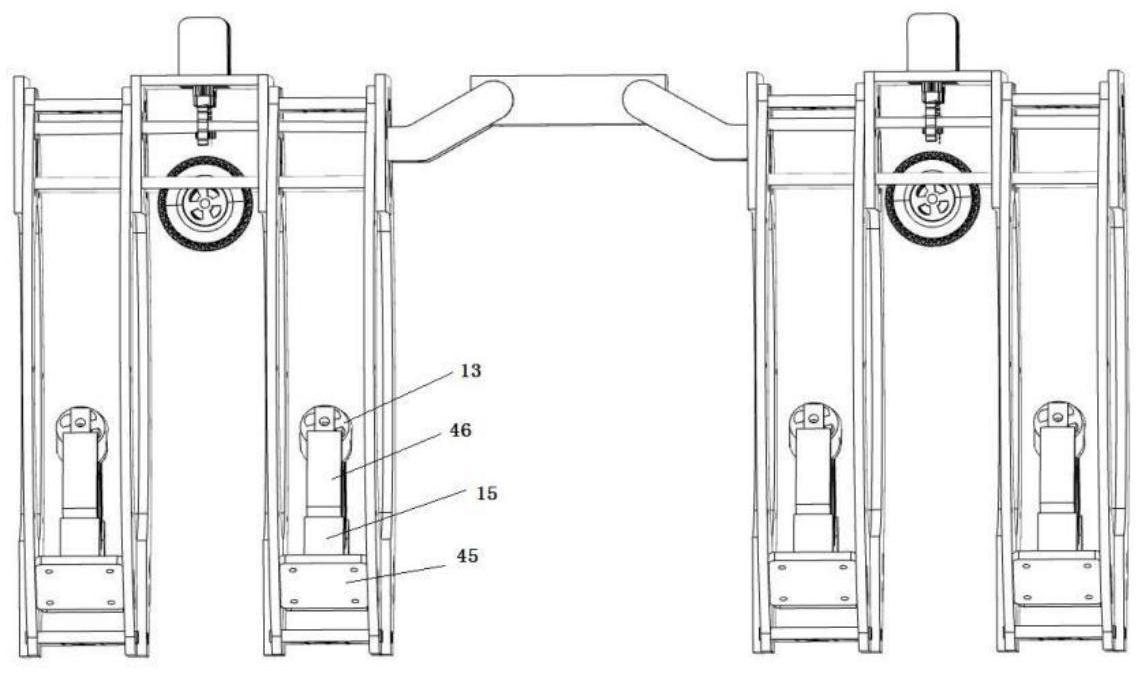
为了解决机器人管道巡行越障的问题,本发明提出如下技术方案:一种巡行可越 障的管道巡行系统,包括两个管道巡行机器人,分别为第一巡行机器人和第二巡行机器人, 将第一巡行机器人的后立板安装一个舵机,且舵机的摆臂与后立板连接,第二巡行机器人 的前立板安装一个舵机,且舵机的摆臂与前立板连接,两个舵机的本体固定连接。 本发明还涉及一种漏液监测系统,包括位于管道相应位置的法兰漏水检测节点或 管道巡行机器人或者巡行可越障的管道巡行系统或者管道巡航系统或者管道漏液检测水 盘或地面漏水巡逻系统中的一个或两个以上的组合。 有益效果:通过对于舵机的控制,能够对于管道巡行机器人进行分时的抬起前行, 实现了管道巡行机器人的可越障巡行,且还进一步能够实现其转弯巡行。 附图说明 图1是巡行可越障的管道巡行系统的结构示意图。 图2是管道巡行机器人的传动结构分解示意图。 4 CN 111550684 A 说 明 书 2/18 页 图3是管道巡行机器人的固定轴、蜗轮轴与相应的孔的配合图。 图4是从动轮安装位置示意图。 图5是从动轮朝向安装示意图。 图6是管道漏液检测水盘的结构示意图。 图7是管道巡航系统示意图。 图8是管道巡航小车结构示意图。 图9是管道巡航小车磁电机与磁条吸附示意图。 图10是管道巡航小车俯视图。 图11是法兰漏水检测节点结构示意图。 图12是法兰漏水检测节点的变形板结构示意图。 图13是电子控制系统模块组成框图。 图14是巡航监测流程图。 其中:1.半环形片,2.蜗轮,3.蜗杆,4.蜗轮轴,5.固定轴,6.弧形孔,7.第一横向齿 轮,8.第二横向齿轮,9.横向锥齿轮,10.竖向锥齿轮,11.连接轴,12.主动轮,13.从动轮, 14.丝杠,15.丝杠电机,16.第一电机,17.第二电机,18.外立板,19.内立板,20.连接板,21. 舵机,22.水盘,23.无线通讯模块,24.传感器,25.磁条,26.车体,27.驱动轮,28.导向轮, 29.转弯臂,30.电机,31.齿轮,32.摄像头,33.铜柱,34.履带,35.可变管径外轮廓,36.第一 板,37.第二板,38.一板一部,39.一板二部,40.二板一部,41.二板二部,41.磁电机,42.主 控板,43.过弯道轮,44.轮轴,45.底座板,46.凹槽框,47.固定块,48.马达。











