
技术摘要:
本申请实施例提供一种目标对象的定位方法、装置、机器人和存储介质,所述方法包括:通过获取机器人在地心大地坐标系下的坐标信息、目标对象与上述机器人之间的距离,以及目标对象相对于上述机器人的方位角和俯仰角;其次,根据上述目标对象与上述机器人之间的距离,以 全部
背景技术:
随着人工智能技术的发展,机器人的种类越来越多,可以应用于多种行业以协助 或取代人类工作。例如,室外巡检机器人可以用于辅助或者替代人工对户外环境进行安防 巡逻,以维护巡逻区域的安全或者处置一些突发事件等。 现有技术中,巡检机器人在帧测目标对象的位置时,可以移动到目标对象旁边,然 后根据自身的全球定位系统(Global Positioning System,GPS)或者其它定位系统能获取 自身的位置坐标,由于巡检机器人与目标对象的距离很近,可以认为外巡检机器人的位置 坐标也是目标对象的位置坐标。 但是当遇到一些突发事故或者巡检机器人不能到达的区域时,巡检机器人无法移 动到目标对象旁边,从而无法侦测到目标对象的位置坐标。
技术实现要素:
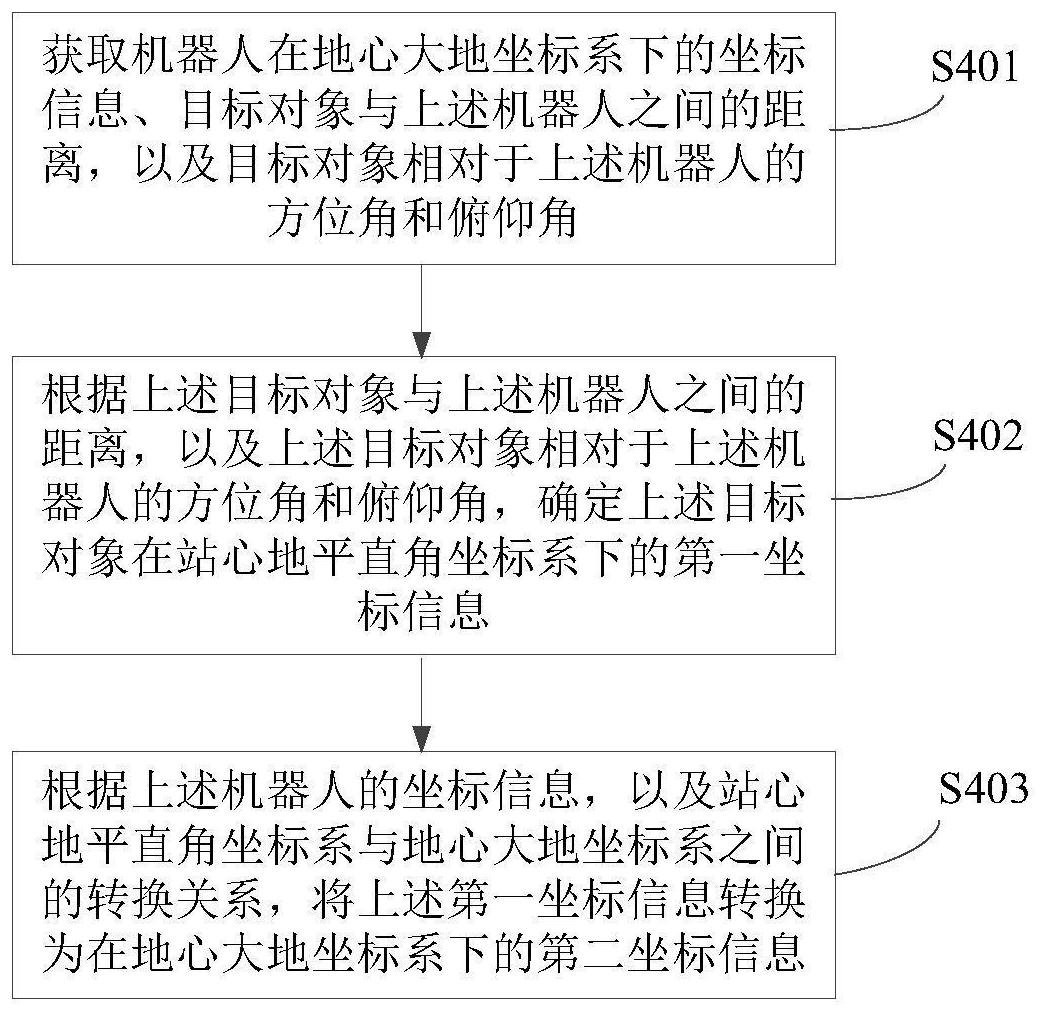
本申请实施例提供一种目标对象的定位方法、装置、机器人和存储介质,用以解决 现有技术中巡检机器人无法侦测到目标对象的位置坐标的技术问题。 第一方面,本申请实施例提供一种目标对象的定位方法,包括: 获取机器人在地心大地坐标系下的坐标信息、目标对象与所述机器人之间的距 离,以及所述目标对象相对于所述机器人的方位角和俯仰角; 根据所述目标对象与所述机器人之间的距离,以及所述目标对象相对于所述机器 人的方位角和俯仰角,确定所述目标对象在站心地平直角坐标系下的第一坐标信息; 根据所述机器人的坐标信息,以及站心地平直角坐标系与地心大地坐标系之间的 转换关系,将所述第一坐标信息转换为在地心大地坐标系下的第二坐标信息。 在一种可能的实现方式中,所述站心地平直角坐标系与地心大地坐标系之间的转 换关系包括:站心地平直角坐标系与地心直角坐标系之间的转换关系,以及地心直角坐标 系与地心大地坐标系之间的转换关系; 所述根据所述机器人的坐标信息,以及站心地平直角坐标系与地心大地坐标系之 间的转换关系,将所述第一坐标信息转换为在地心大地坐标系下的第二坐标信息,包括: 根据所述机器人的坐标信息,以及所述站心地平直角坐标系与地心直角坐标系之 间的转换关系,将所述第一坐标信息转换为在地心直角坐标系下的第三坐标信息; 根据地心直角坐标系与地心大地坐标系之间的转换关系,将所述第三坐标信息转 换为在地心大地坐标系下的第二坐标信息。 在一种可能的实现方式中,获取所述目标对象与所述机器人之间的距离,包括: 通过所述机器人中的测距模块测量所述目标对象与所述机器人之间的距离。 4 CN 111551171 A 说 明 书 2/14 页 在一种可能的实现方式中,获取所述目标对象相对于所述机器人的方位角和俯仰 角,包括: 通过所述机器人中的姿态测量模块测量所述目标对象相对于所述机器人的方位 角和俯仰角。 在一种可能的实现方式中,所述获取机器人在地心大地坐标系下的坐标信息,包 括: 通过所述机器人中的定位模块测量机器人在地心大地坐标系下的坐标信息。 在一种可能的实现方式中,所述获取机器人在地心大地坐标系下的坐标信息、目 标对象与所述机器人之间的距离,以及所述目标对象相对于所述机器人的方位角和俯仰角 之前,所述方法还包括: 接收控制设备发送的定位指令;其中,所述定位指令用于指示所述机器人对准所 述目标对象,以对所述目标对象进行定位; 根据所述定位指令对准所述目标对象。 在一种可能的实现方式中,所述方法还包括: 将所述第二坐标信息发送给所述控制设备。 在一种可能的实现方式中,所述方法还包括: 将采集到的所述目标对象的图像信息发送给所述控制设备。 第二方面,本申请实施例提供一种机器人,所述机器人包括:与处理器连接的定位 模块、测距模块和姿态测量模块; 其中,所述定位模块,用于获取所述机器人在地心大地坐标系下的坐标信息; 所述测距模块,用于获取目标对象与所述机器人之间的距离; 所述姿态测量模块,用于获取所述目标对象相对于所述机器人的方位角和俯仰 角; 所述处理器,用于根据所述目标对象与所述机器人之间的距离,以及所述目标对 象相对于所述机器人的方位角和俯仰角,确定所述目标对象在站心地平直角坐标系下的第 一坐标信息,并根据所述机器人的坐标信息,以及站心地平直角坐标系与地心大地坐标系 之间的转换关系,将所述第一坐标信息转换为在地心大地坐标系下的第二坐标信息。 在一种可能的实现方式中,所述站心地平直角坐标系与地心大地坐标系之间的转 换关系包括:站心地平直角坐标系与地心直角坐标系之间的转换关系,以及地心直角坐标 系与地心大地坐标系之间的转换关系,所述处理器具体用于: 根据所述机器人的坐标信息,以及所述站心地平直角坐标系与地心直角坐标系之 间的转换关系,将所述第一坐标信息转换为在地心直角坐标系下的第三坐标信息; 根据地心直角坐标系与地心大地坐标系之间的转换关系,将所述第三坐标信息转 换为在地心大地坐标系下的第二坐标信息。 在一种可能的实现方式中,所述机器人还包括:传输模块和图像采集模块; 其中,所述传输模块,用于接收控制设备发送的定位指令,并将所述定位指令发送 给所述处理器;其中,所述定位指令用于指示所述机器人对准所述目标对象,以对所述目标 对象进行定位; 对应地,所述处理器还用于: 5 CN 111551171 A 说 明 书 3/14 页 根据所述定位指令控制所述测距模块和所述图像采集模块对准所述目标对象。 在一种可能的实现方式中,所述传输模块还用于: 将所述第二坐标信息和所述图像采集模块采集到的所述目标对象的图像信息发 送给所述控制设备。 第三方面,本申请实施例提供一种目标对象的定位装置,所述装置应用于机器人, 所述装置包括: 获取模块,用于获取机器人在地心大地坐标系下的坐标信息、目标对象与所述机 器人之间的距离,以及所述目标对象相对于所述机器人的方位角和俯仰角; 确定模块,用于根据所述目标对象与所述机器人之间的距离,以及所述目标对象 相对于所述机器人的方位角和俯仰角,确定所述目标对象在站心地平直角坐标系下的第一 坐标信息; 转换模块,用于根据所述机器人的坐标信息,以及站心地平直角坐标系与地心大 地坐标系之间的转换关系,将所述第一坐标信息转换为在地心大地坐标系下的第二坐标信 息。 第四方面,本申请实施例提供一种计算机可读存储介质,所述计算机可读存储介 质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现上述第一方面 中任一项所述的目标对象的位置定位方法。 本申请实施例提供的目标对象的定位方法、装置、机器人和存储介质,通过获取机 器人在地心大地坐标系下的坐标信息、目标对象与上述机器人之间的距离,以及目标对象 相对于上述机器人的方位角和俯仰角;其次,根据上述目标对象与上述机器人之间的距离, 以及上述目标对象相对于上述机器人的方位角和俯仰角,确定上述目标对象在站心地平直 角坐标系下的第一坐标信息;然后,根据上述机器人的坐标信息,以及站心地平直角坐标系 与地心大地坐标系之间的转换关系,将上述第一坐标信息转换为在地心大地坐标系下的第 二坐标信息。可见,本申请实施例的机器人实现了远距离侦测目标对象的位置坐标。 附图说明 此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施 例,并与说明书一起用于解释本公开的原理。 图1为本申请实施例提供的坐标系的关系示意图一; 图2为本申请实施例提供的坐标系的关系示意图二; 图3为本申请实施例提供的应用架构示意图一; 图4为本申请一实施例提供的目标对象的定位方法的流程示意图; 图5为本申请实施例提供的机器人的立体结构示意图; 图6为本申请实施例提供的目标对象在站心地平直角坐标系下的示意图; 图7为本申请另一实施例提供的目标对象的定位方法的流程示意图; 图8为本申请实施例提供的应用架构示意图二; 图9为本申请另一实施例提供的目标对象的定位方法的流程示意图; 图10为本申请实施例提供的机器人的结构示意图; 图11为本申请实施例提供的目标对象的定位装置的结构示意图。 6 CN 111551171 A 说 明 书 4/14 页 通过上述附图,已示出本公开明确的实施例,后文中将有更详细的描述。这些附图 和文字描述并不是为了通过任何方式限制本公开构思的范围,而是通过参考特定实施例为 本领域技术人员说明本公开的概念。











