
技术摘要:
本发明涉及一种双层托板装置,其包括:底座,所述底座包括第一支架、第二支架及第三支架,其中第一支架设置于底座顶部,第二支架设置于底座中部,第三支架垂直设置于第二支架顶部;第一托板装置,其位于所述第一支架上方,所述第一托板装置包括第一气缸、第一滑轨、第 全部
背景技术:
】 目前,工厂端产线使用的一种托板装置,其采用的作业步骤如下:首先,将产品放 置于第一托板、第二托板的上表面,当机械手臂吸取完第一托板放置的产品时,人工将第一 托板往后推动,再将第二托板往前拉动,机械手臂开始吸取产品放置于第一托板,完成后开 始吸取第二托板上放置的产品,其次,当机械手臂吸取完第二托板放置的产品时,人工将第 二托板往后推动,再将第一托板往前拉动,使得第一托板、第二托板还原到开始位置,机械 手臂吸取产品放置于第二托板上,完成后开始吸取第一托板上放置的产品,最后,机械手臂 循环作业。 然而,由于该托板装置需要作业人员长时间手动推拉托板,容易引起手臂酸痛,需 要替换另一人员接替工作,因此该托板装置不仅使作业效率降低,还增加了用人成本。 有鉴于此,实有必要提供一种双层托板装置,以解决目前托板装置存在作业效率 低、用人成本增加的问题。 【
技术实现要素:
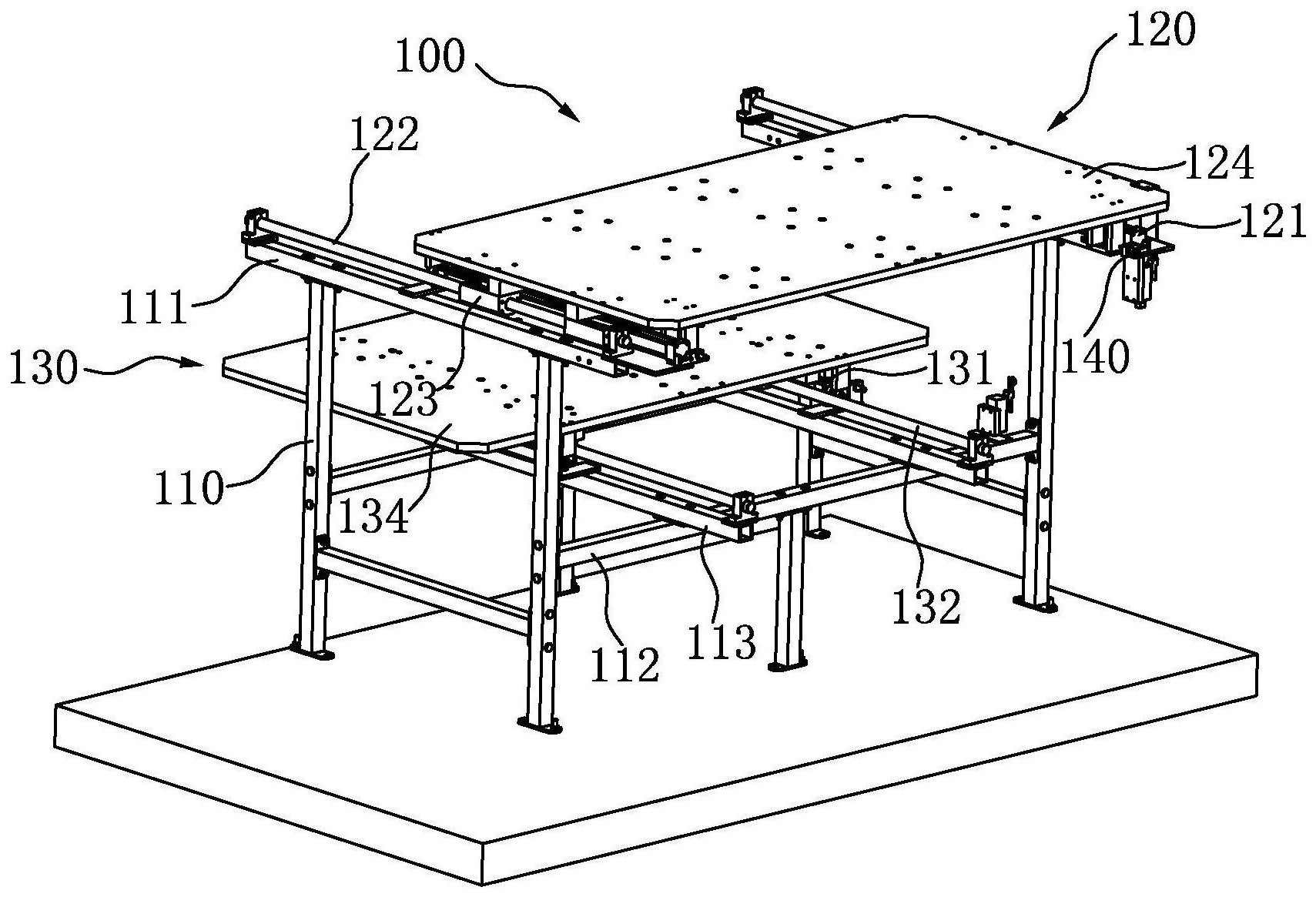
】 本发明的目的在于提供一种双层托板装置,以解决目前托板装置存在作业效率 低、用人成本增加的问题,该双层托板装置其包括: 底座,所述底座包括第一支架、第二支架及第三支架,其中所述第一支架设置于所 述底座的顶部,所述第二支架设置于所述底座的中部,所述第三支架垂直设置于所述第二 支架的顶部; 第一托板装置,其位于所述第一支架上方,所述第一托板装置包括第一气缸、第一 滑轨、第一滑块及第一托板,其中所述第一气缸及所述第一滑轨固定设置于所述第一支架 上,所述第一滑块活动设置所述第一滑轨上,并且所述第一气缸包括第一缸筒及第一活塞 杆,所述第一活塞杆与所述第一滑块连接,所述第一托板固定设置于所述第一滑块上方; 第二托板装置,其位于所述第三支架上方,所述第二托板装置包括第二气缸、第二 滑轨、第二滑块及第二托板,其中所述第二气缸及所述第二滑轨固定设置于所述第三支架 上,所述第二滑块活动设置所述第二滑轨上,并且所述第二气缸包括第二缸筒及第二活塞 杆,所述第二活塞杆与所述第二滑块连接,所述第二托板固定设置于所述第二滑块上方; 传感器,所述传感器设置于所述第一气缸上; 控制单元,所述控制单元分别与所述第一气缸、所述第二气缸及所述传感器电性 连接。 可选的,所述第一气缸的第一活塞杆的最大位移量为第一定位点,所述第一气缸 的第一活塞杆的最小位移量为第二定位点。 可选的,所述传感器的类型为位移传感器。 3 CN 111547499 A 说 明 书 2/4 页 可选的,所述第一滑块及所述第二滑块的中心是通孔结构。 可选的,所述双层托板装置还包括机械手臂,所述机械手臂设置于所述底座的两 侧,所述机械手臂与所述控制单元电性连接。 可选的,所述机械手臂的手臂端设置有一吸盘机构。 相较于现有技术,本发明的双层托板装置,通过控制单元控制底座一侧的机械手 臂吸取产品放置于第二托板上,然后再由控制单元控制第一气缸带动第一托板移动,同时 控制第二气缸带动第二托板移动,当传感器探测到第一气缸的第一活塞杆到达第一定位点 后,发送信号给控制单元,控制单元接收该信号后控制第一气缸及第二气缸停止移动,并控 制底座一侧的机械手臂吸取产品放置于第一托板上,以及控制底座另一侧的机械手臂将第 二托板上的产品取走,经过一定时间产品取放完成后,再由控制单元控制第二气缸带动第 二托板移动,同时控制第一气缸带动第一托板移动,当传感器探测到第一气缸的第一活塞 杆到达第二定位点后,发送信号给控制单元,控制单元接收该信号后控制第一气缸及第二 气缸停止移动,并控制底座一侧的机械手臂吸取产品放置于第二托板上,以及控制底座另 一侧的机械手臂将第一托板上的产品取走,当机械手臂完成产品的取放后,进行下一个作 业循环。利用本发明的双层托板装置,不仅大大降低了人工成本,还提高了作业效率。 【附图说明】 图1是本发明双层托板装置的结构示意图。 图2是本发明双层托板装置于一较佳实施例中第一工作状态的结构示意图。 图3是本发明双层托板装置于一较佳实施例中第二工作状态的结构示意图。 图4是本发明双层托板装置于一较佳实施例中第三工作状态的结构示意图。 图5是本发明双层托板装置于一较佳实施例中第四工作状态的结构示意图。 【











