
技术摘要:
本发明申请公开了一种五自由度双目防抖仿生眼机构,包括双目仿生眼,包括两个能够左右运动的1自由度眼球组件;颈部组件,包括3自由度颈部关节,所述颈部组件驱动所述双目仿生眼上下运动、左右运动和左右摇摆运动的一种或多种。本发明申请解决了现有的多自由度仿生眼通 全部
背景技术:
作为人类与外界环境进行信息交互最重要的器官,眼睛是人类感知外部环境的重 要渠道。对于仿生机器人而言,“眼睛”对于其正确执行复杂任务的重要性不言而喻。同时, 眼睛获取信息的过程又离不开身体的协调运动,其中眼睛与颈部的协调运动发挥重要的作 用。随着仿生眼技术的突破,人们对其获取信息的能力也提出更高的要求。 人体生理学与解剖学研究表明,每只人眼有三个自由度,分别实现眼球的上下转 动、左右运动和横滚运动;此外人类颈部关节也具有三个自由度,分别控制着头部的上下转 动、左右转动和左右摇摆运动。 对现有的技术文献的检索发现,目前的仿生眼机器人主要集中在模仿眼球运动的 研究,对头眼协调运动机制的研究相对较少。专利CN110405784A提出了一种七自由度防抖 高动态仿生眼结构,该结构包含三自由度的颈部机构和两个两自由度的眼球机构,通过在 仿生眼的眼球部位对上下和左右两个方向自由度的控制来进行信息采集作业,但由于仿生 眼眼球自由度设置的多维化,导致仿生眼整体结构防抖性能弱、结构复杂、布线杂乱,不利 于仿生眼后续零部件的更换和维护。
技术实现要素:
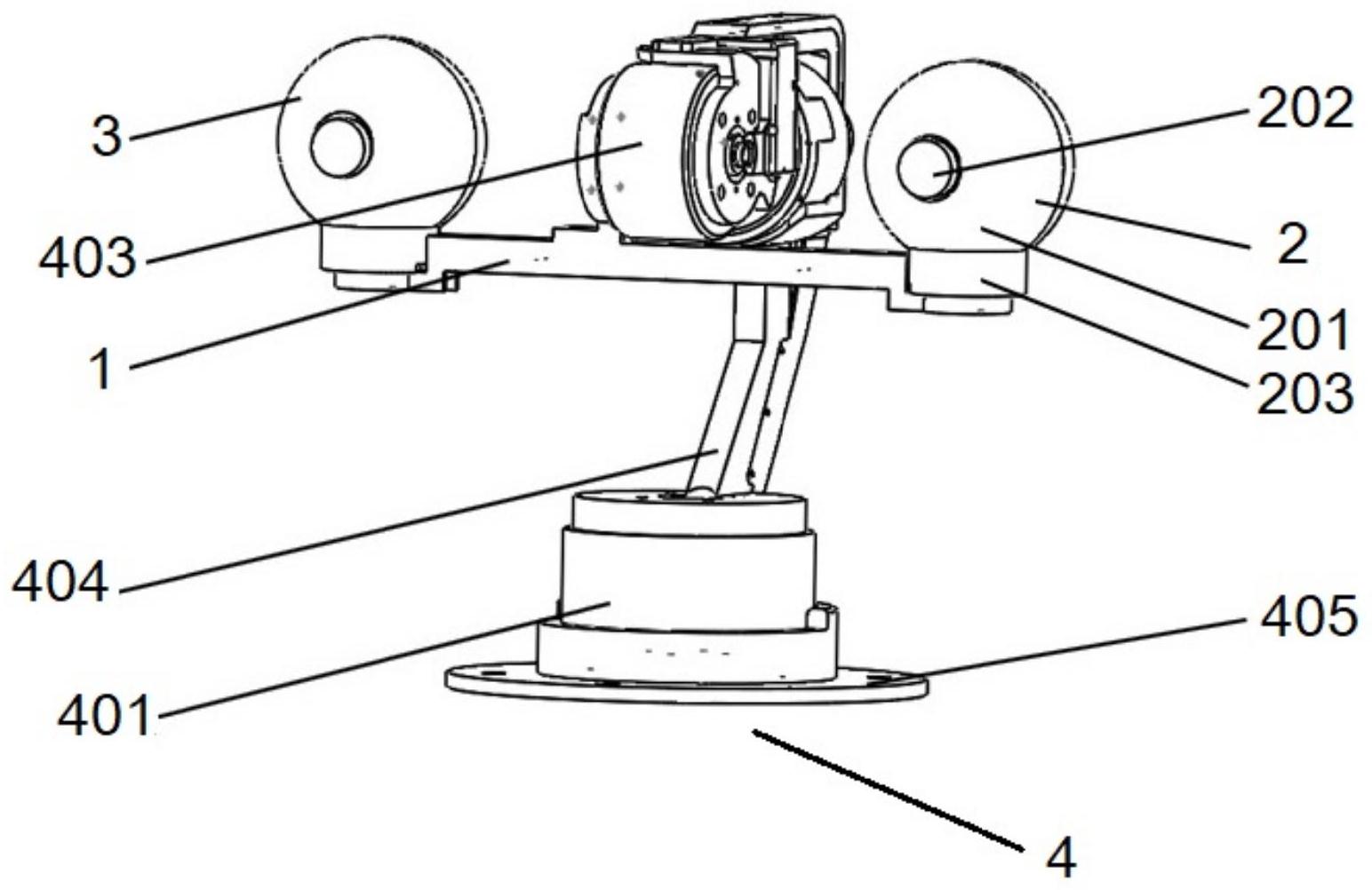
本发明申请的主要目的在于提供一种五自由度双目防抖仿生眼机构,以解决现有 的多自由度仿生眼由于仿生眼眼球自由度设置的多维化,导致仿生眼整体结构防抖性能 弱、结构复杂、布线杂乱,不利于仿生眼后续零部件的更换和维护的技术问题。 为了实现上述目的,根据本发明申请的一个方面,提供了一种五自由度双目防抖 仿生眼机构。 根据本发明申请的五自由度双目防抖仿生眼机构包括: 双目仿生眼,包括两个能够左右运动的1自由度眼球组件; 颈部组件,包括3自由度颈部关节,所述颈部组件驱动所述双目仿生眼上下运动、 左右运动和左右摇摆运动的一种或多种。 进一步的,所述1自由度眼球组件包含1个电机。 进一步的,所述1自由度眼球组件包括壳体和设置在所述壳体中的相机模组,所述 壳体和所述相机模组设置在所述1自由度眼球组件的所述电机上。 进一步的,所述相机模组包括依次连接的相机、相机支架、惯性测量装置和用于连 接所述壳体的固定座。 进一步的,所述固定座为U型结构。 进一步的,所述两个所述1自由度眼球组件为左眼球组件和右眼球组件。 3 CN 111604918 A 说 明 书 2/5 页 进一步的,包括支架,所述左眼球组件和所述右眼球组件等距离设置在所述支架 的两端。 进一步的,所述左眼球组件、所述右眼球组件和所述支架的整体结构重心,与所述 颈部组件的结构重心竖向重合。 进一步的,所述3自由度颈部关节包括驱动结构和颈部结构。 进一步的,所述驱动结构包括3组电机,所述3组电机包括控制所述颈部结构进行 左右运动的第一电机、控制所述颈部结构进行左右摇摆的第二电机和控制所述颈部结构进 行上下作业的第三电机。 本发明申请实施例中对仿生眼眼球机构的可运动自由度进行优化,仅保留其偏航 运动自由度,同时通过颈部机构的俯仰关节自由度来弥补眼球机构的俯仰运动,进而使结 构更加轻盈,动态性能优异。采用1自由度眼球组件,通过颈部组件的3自由度颈部关节调整 进行大范围的场景切换,双目仿生眼的眼球关节在其基础上进行小范围视野调整,达到了 实现大场景的视觉信息获取设置的目的,从而实现了仿生眼整体结构紧凑、布线更加简洁、 机身更加轻盈、结构稳定且防抖性能好的技术效果,进而解决了现有的多自由度仿生眼通 过对仿生眼眼球的进行多维度自由度调整,导致多自由度仿生眼上部构件集中、结构复杂 布线连接杂乱、匹配仿生眼设置的机身体量大,同时由于自由度控制集中在仿生眼眼球处, 导致各自由度控制构件之间相互影响,造成仿生眼的防抖性能弱的技术问题的技术问题。 另外本发明申请在通过对相机模组的结构的连接方面的改进,使惯性测量装置贴 合相机设置,并通过相机支架和固定座使的所述相机模组得整体结构更加的紧凑和稳定, 便于惯性测量装置对相机进行信息采集,进一步提高了本发明申请五自由度双目防抖仿生 眼机构的防抖效果。 附图说明 构成本发明申请的一部分的附图用来提供对本发明申请的进一步理解,使得本发 明申请的其它特征、目的和优点变得更明显。本发明申请的示意性实施例附图及其说明用 于解释本发明申请,并不构成对本发明申请的不当限定。在附图中: 图1是根据本发明申请实施例的五自由度双目防抖仿生眼机构的结构示意图A; 图2根据本发明申请实施例的五自由度双目防抖仿生眼机构的结构示意图B; 图3是根据本发明申请实施例的五自由度双目防抖仿生眼机构的相机模组的结构 示意图。 附图标记 1:支架;2:左眼球组件;201:壳体;202:相机模组;2021:相机;2022:相机支架; 2023:惯性测量装置;2024:固定座;203:眼球电机;3:右眼球组件;4:颈部组件;401:第一电 机;402:第二电机;403:第三电机;404:支撑件;4041:连接件;405:底座。











