
技术摘要:
本申请涉及一种图像识别方法、装置、计算机设备和存储介质。所述方法包括:接收摄像头发送的第一图像;根据本地存储的各个特征信息对所述第一图像进行识别;若识别失败,则将所述第一图像发送至服务器;接收并保存所述服务器返回的所述第一图像中目标对象的特征信息; 全部
背景技术:
随着图像识别技术的发展,图像识别技术在不同的领域均有应用。传统的图像识 别方式主要包括本地识别和云端识别,本地识别是指通过现场与摄像头关联的终端设备对 摄像头采集的图像进行识别;云端识别是指将摄像头采集的图像通过网络传输到服务器, 由服务器进行识别。由于终端设备计算能力的较小,本地识别的识别结果往往不够准确;而 云端识别由于受到网络传输和服务器响应速度的影响,其识别的时效性较差。 因此,上述传统的本地识别和云端识别方案均无法满足对识别精度和识别时效性 要求较高的应用场景。
技术实现要素:
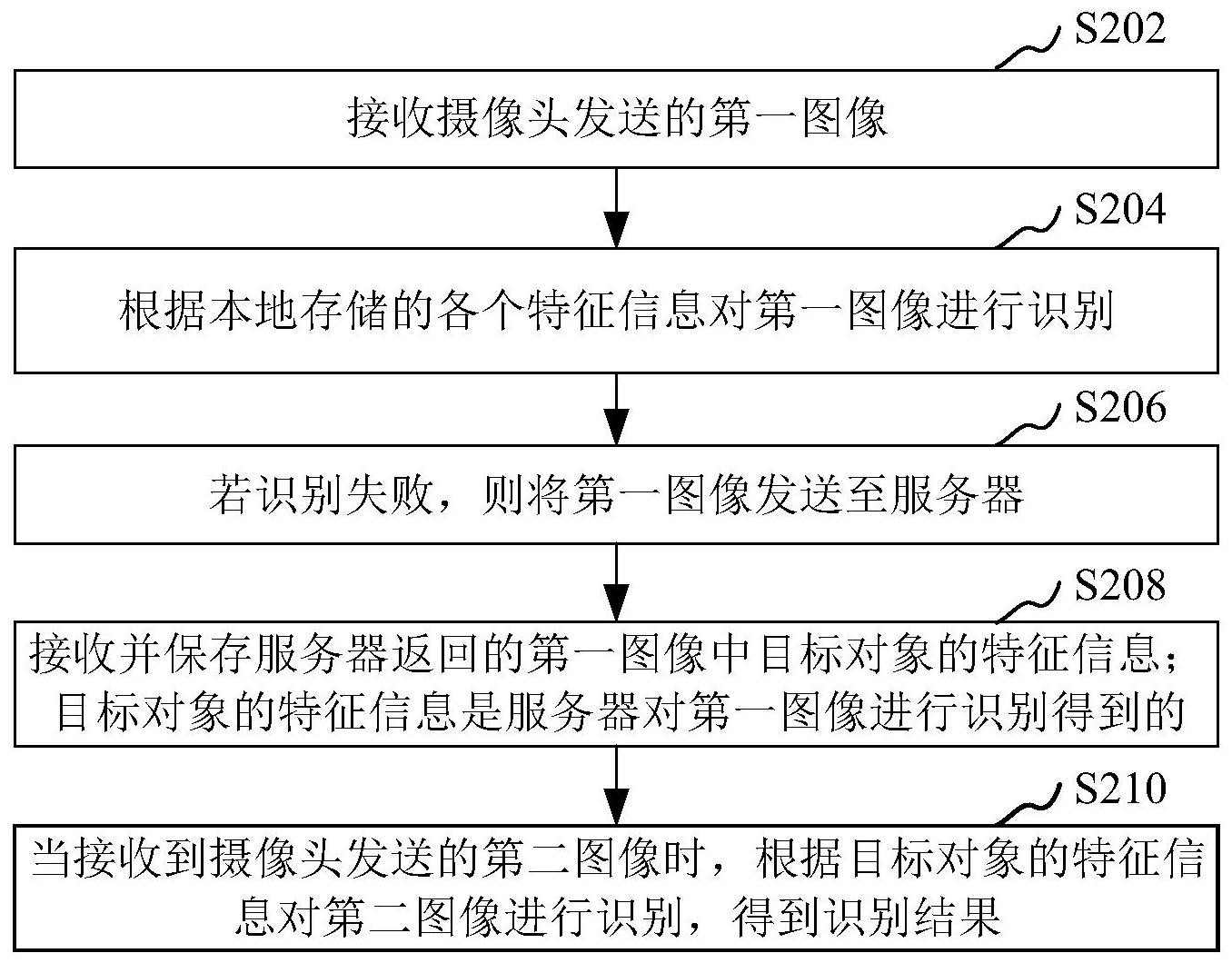
基于此,有必要针对传统的本地识别和云端识别方案均无法满足对识别精度和识 别时效性要求较高的应用场景的技术问题,提供一种图像识别方法、装置、计算机设备和计 算机可读存储介质。 一种图像识别方法,应用于终端,所述方法包括: 接收摄像头发送的第一图像; 根据本地存储的各个特征信息对所述第一图像进行识别; 若识别失败,则将所述第一图像发送至服务器; 接收并保存所述服务器返回的所述第一图像中目标对象的特征信息;所述目标对 象的特征信息是所述服务器对所述第一图像进行识别得到的; 当接收到所述摄像头发送的第二图像时,根据所述目标对象的特征信息对所述第 二图像进行识别,得到识别结果。 在一个实施例中,所述方法还包括: 接收所述服务器返回的所述目标对象在所述第一图像中的第一位置信息; 按照所述第一位置信息在所述第一图像中对所述目标对象进行标注,得到标注后 第一图像; 对所述标注后第一图像进行显示。 在一个实施例中,所述方法还包括: 根据所述识别结果确定所述目标对象在所述第二图像中的第二位置信息; 按照所述第二位置信息在所述第二图像中对所述目标对象进行标注,得到标注后 第二图像; 将显示的所述标注后第一图像替换为所述标注后第二图像。 在一个实施例中,所述方法还包括: 4 CN 111611871 A 说 明 书 2/14 页 接收所述服务器返回的所述目标对象的属性信息和参考图像; 生成包含所述参考图像和所述属性信息的提示信息; 当显示所述标注后第一图像时,按照所述第一位置信息显示所述提示信息; 当显示所述标注后第二图像时,按照所述第二位置信息显示所述提示信息。 一种图像识别方法,应用于服务器,所述方法包括: 接收终端发送的第一图像; 对所述第一图像进行识别,得到目标对象的特征信息; 根据所述目标对象的特征信息确定所述目标对象的运动方向; 根据所述目标对象的运动方向,确定所述目标对象在未来时刻到达的位置所对应 的目标摄像头; 将所述目标对象的特征信息发送至所述终端以及所述目标摄像头对应的目标终 端。 在一个实施例中,所述根据所述目标对象的运动方向,确定所述目标对象在未来 时刻到达的位置所对应的目标摄像头,包括: 获取摄像头部署信息和拍摄所述第一图像的摄像头位置信息; 根据所述目标对象的运动方向、所述摄像头部署信息和拍摄所述第一图像的摄像 头位置信息,确定所述目标对象在未来时刻到达的位置所对应的目标摄像头。 一种图像识别装置,所述装置包括: 本地接收模块,用于接收摄像头发送的第一图像; 本地识别模块,用于根据本地存储的各个特征信息对所述第一图像进行识别; 发送模块,用于若识别失败,则将所述第一图像发送至服务器; 所述本地接收模块,还用于接收并保存所述服务器返回的所述第一图像中目标对 象的特征信息;所述目标对象的特征信息是所述服务器对所述第一图像进行识别得到的; 所述本地识别模块,还用于当接收到所述摄像头发送的第二图像时,根据所述目 标对象的特征信息对所述第二图像进行识别,得到识别结果。 在一个实施例中,所述装置还包括: 所述本地接收模块,还用于接收所述服务器返回的所述目标对象在所述第一图像 中的第一位置信息; 标注模块,用于按照所述第一位置信息在所述第一图像中对所述目标对象进行标 注,得到标注后第一图像; 显示模块,用于对所述标注后第一图像进行显示。 在一个实施例中,所述装置还包括: 位置确定模块,用于根据所述识别结果确定所述目标对象在所述第二图像中的第 二位置信息; 所述标注模块,还用于按照所述第二位置信息在所述第二图像中对所述目标对象 进行标注,得到标注后第二图像; 所述显示模块,还用于将显示的所述标注后第一图像替换为所述标注后第二图 像。 在一个实施例中,所述装置还包括: 5 CN 111611871 A 说 明 书 3/14 页 所述接收模块,还用于接收所述服务器返回的所述目标对象的属性信息和参考图 像; 提示信息生成模块,用于生成包含所述参考图像和所述属性信息的提示信息; 所述显示模块,还用于当显示所述标注后第一图像时,按照所述第一位置信息显 示所述提示信息; 所述显示模块,还用于当显示所述标注后第二图像时,按照所述第二位置信息显 示所述提示信息。 一种图像识别装置,所述装置包括: 云端接收模块,用于接收终端发送的第一图像; 云端识别模块,用于对所述第一图像进行识别,得到目标对象的特征信息; 运动方向确定模块,用于根据所述目标对象的特征信息确定所述目标对象的运动 方向; 目标摄像头确定模块,用于根据所述目标对象的运动方向,确定所述目标对象在 未来时刻到达的位置所对应的目标摄像头; 云端发送模块,用于将所述目标对象的特征信息发送至所述终端以及所述目标摄 像头对应的目标终端。 在一个实施例中,所述目标摄像头确定模块还用于: 获取摄像头部署信息和拍摄所述第一图像的摄像头位置信息; 根据所述目标对象的运动方向、所述摄像头部署信息和拍摄所述第一图像的摄像 头位置信息,确定所述目标对象在未来时刻到达的位置所对应的目标摄像头。 一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理 器执行所述计算机程序时上述任一项所述的方法的步骤。 一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执 行时实现上述任一项所述的方法的步骤。 上述图像识别方法、装置、计算机设备和计算机可读存储介质,通过终端预先存储 特征信息,使得终端在接收摄像头发送的第一图像时,根据本地存储的各个特征信息对第 一图像进行识别,若识别失败,则将第一图像发送至服务器,接收并保存服务器返回的第一 图像中目标对象的特征信息,其中,目标对象的特征信息是服务器对第一图像进行识别得 到的;从而当终端再接收到摄像头发送的第二图像时,根据目标对象的特征信息对第二图 像进行识别,得到识别结果,从而既保证了识别结果的精度,又提高了对目标对象的识别的 时效性。 附图说明 图1为一个实施例中图像识别方法的应用环境图; 图2为一个实施例中图像识别方法的流程示意图; 图3为一个实施例中标注后图像的示意图; 图4为一个实施例中显示内容的示意图; 图5为一个实施例中实际场景和提示信息的示意图; 图6为另一个实施例中图像识别方法的流程示意图; 6 CN 111611871 A 说 明 书 4/14 页 图7为一个实施例中应用场景的示意图; 图8为另一个实施例中图像识别方法的流程示意图; 图9为一个实施例中图像识别装置的结构框图; 图10为一个实施例中图像识别装置的结构框图; 图11为一个实施例中图像识别系统的结构框图; 图12为一个实施例中计算机设备的内部结构图; 图13为另一个实施例中计算机设备的内部结构图。











