
技术摘要:
本发明提供一种用于混凝土泵送设备的防倾翻控制方法,包括:获取混凝土泵送设备的臂架的当前姿态;根据所述当前姿态,计算所述混凝土泵送设备在以下两种状态之间的整车重心位置偏移量ΔG和/或整车倾翻力矩偏移量:所述臂架的各节臂上混凝土输送管空管状态、以及所述臂 全部
背景技术:
现有技术中针对混凝土设备整车重心计算中没有考虑到臂架上输送管中混凝土 的质量对整车倾翻的影响,并且未提及如何预防设备倾翻。
技术实现要素:
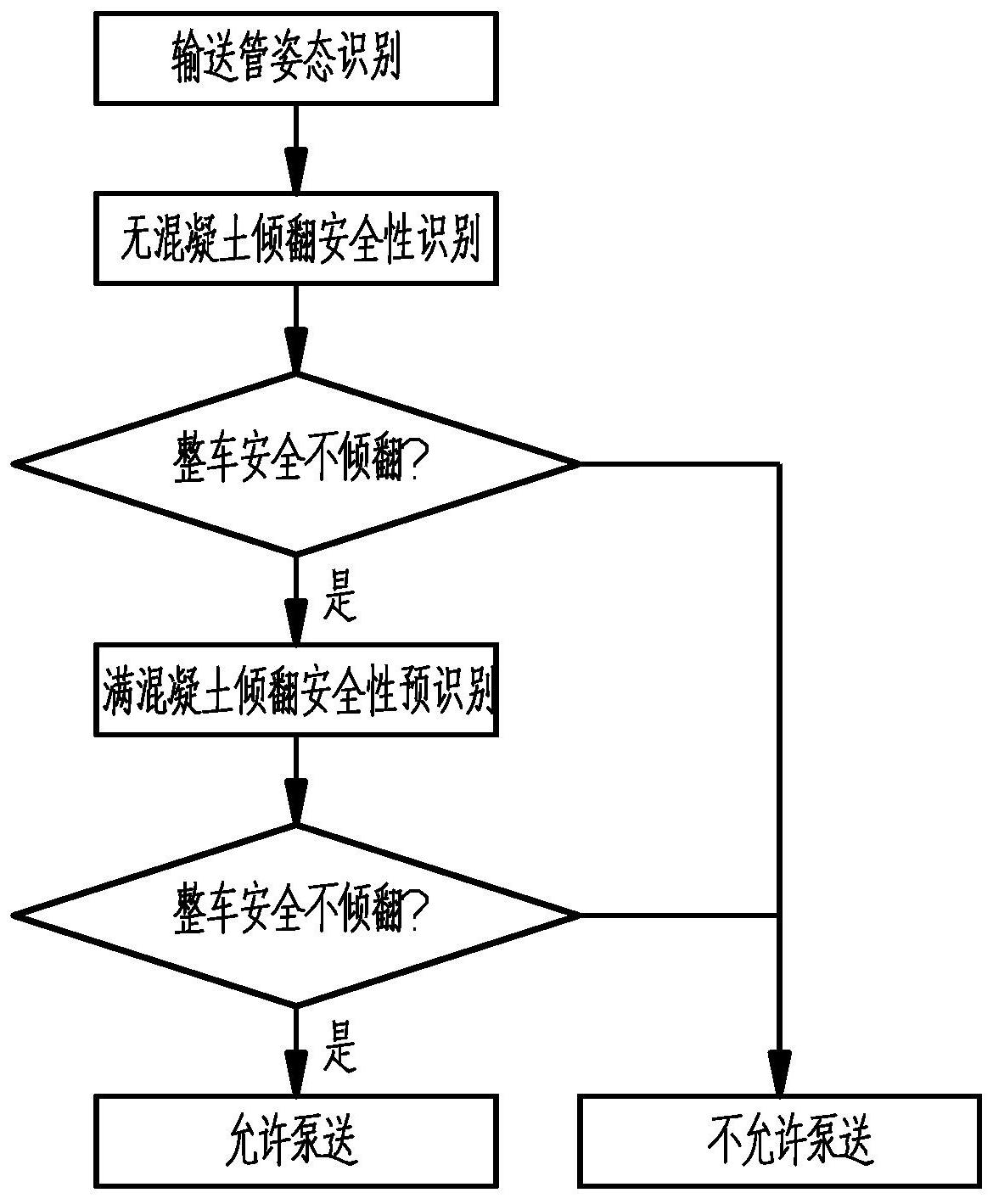
本发明实施例的目的是提供一种用于混凝土设备的防倾翻控制方法和系统、混凝 土设备,其中该方法考虑到混凝土输送管内混凝土的质量对整车重心的影响,在计算整车 重心过程中将混凝土质量信息并入相应混凝土质量数据,以估算出混凝土设备在泵送混凝 土状态情况下的更加准确的整车重心,进而可以预测出当混凝土设备以当前姿态进行泵送 时是否存在倾翻的危险,提高车辆作业的安全性。 为了实现上述目的,本发明实施例提供一种用于混凝土泵送设备的防倾翻控制方 法,所述方法包括: 获取混凝土泵送设备的臂架的当前姿态; 根据所述当前姿态,计算所述混凝土泵送设备在以下两种状态之间的整车重心位 置偏移量ΔG和/或整车倾翻力矩偏移量:所述臂架的各节臂上混凝土输送管空管状态、以 及所述臂架的各节臂上混凝土输送管满管输送状态;以及 根据所述整车重心位置偏移量ΔG和/或整车倾翻力矩偏移量,确定是否允许所述 混凝土泵送设备进行泵送。 可选的,所述根据所述当前姿态,计算所述混凝土泵送设备在所述两种状态之间 的整车重心位置偏移量包括: 根据所述臂架当前姿态计算所述整车重心G0,并确定所述整车重心G0在泵送安全 区域所在平面的投影坐标(x0,y0);以及 根据所述整车重心G0及其所述投影坐标(x0,y0)以及预存的以下数据计算所述整 车重心位置偏移量ΔG:混凝土泵送设备臂架的各节臂上混凝土输送管满管输送状态下所 填充的混凝土质量mi和混凝土输送管空管状态下的整车质量M0。 可选的,所述根据整车重心位置偏移量ΔG,确定是否允许所述混凝土泵送设备进 行泵送包括: 计算混凝土输送管满管输送状态的整车重心G1,G1=G0 ΔG;以及 确定所述整车重心G1是否落入所述泵送安全区域中,在所述整车重心G1超出所述 泵送安全区域的情况下,不允许所述混凝土泵送设备进行泵送。 可选的,所述确定整车重心G0在泵送安全区域所在平面的投影坐标(x0,y0)包括: 设定混凝土泵送设备支腿的支撑区域为所述泵送安全区域; 5 CN 111608392 A 说 明 书 2/9 页 在所述泵送安全区域所在平面建立坐标系;以及 将所述整车重心G0向所述坐标系进行投影以得到所述整车重心G0在泵送安全区域 所在平面的投影坐标(x0,y0)。 可选的,所述计算所述整车重心位置偏移量ΔG包括:根据所述整车重心G0计算各 节臂在混凝土输送管满管输送状态下在泵送安全区域所在平面的投影坐标(xi,yi),并根据 以下计算公式计算所述整车重心偏移量ΔG: ΔG为向量(ΔGx,ΔGy)。 可选的,所述根据所述整车重心G0计算各节臂在混凝土输送管满管输送状态下在 泵送安全区域所在平面的投影坐标(xi,yi)包括: 根据所述臂架的当前姿态以及所述混凝土质量mi计算所述各节臂重心Gi;以及 将所述各节臂重心Gi向所述坐标系进行投影以得到所述各节臂在混凝土输送管 满管输送状态下在泵送安全区域所在平面的投影坐标(xi,yi)。 本发明实施例还提供一种用于混凝土泵送设备的防倾翻控制方法,该方法包括: 在当前姿态下获取臂架的其他姿态,根据所述其他姿态,计算所述混凝土泵送设 备在以下两种状态之间的整车重心位置偏移量ΔG和/或整车倾翻力矩偏移量:所述臂架的 各节臂上混凝土输送管空管状态、以及所述臂架的各节臂上混凝土输送管满管输送状态; 以及 根据所述整车重心位置偏移量ΔG和/或整车倾翻力矩偏移量,确定是否允许所述 混凝土泵送设备的臂架调整到所述其他姿态。 本发明实施例还提供一种用于混凝土设备的防侧翻控制系统,所述系统包括: 数据获取单元,用于混凝土泵送设备的臂架的当前姿态; 计算单元,用于执行以下操作: 根据所述当前姿态,计算所述混凝土泵送设备在以下两种状态之间的整车重心位 置偏移量ΔG和/或整车倾翻力矩偏移量:所述臂架的各节臂上混凝土输送管空管状态、以 及所述臂架的各节臂上混凝土输送管满管输送状态;以及 根据所述整车重心位置偏移量ΔG和/或整车倾翻力矩偏移量,确定是否允许所述 混凝土泵送设备进行泵送。 可选的,所述根据所述当前姿态,计算所述混凝土泵送设备在所述两种状态之间 的整车重心位置偏移量包括: 根据所述臂架当前姿态计算所述整车重心G0,并确定所述整车重心G0在泵送安全 区域所在平面的投影坐标(x0,y0);以及 根据所述整车重心G0及其所述投影坐标(x0,y0)以及预存的以下数据计算所述整 车重心位置偏移量ΔG:混凝土泵送设备臂架的各节臂上混凝土输送管满管输送状态下所 填充的混凝土质量mi和混凝土输送管空管状态下的整车质量M0。 可选的,所述根据整车重心位置偏移量ΔG,确定是否允许所述混凝土泵送设备进 6 CN 111608392 A 说 明 书 3/9 页 行泵送包括: 计算混凝土输送管满管输送状态的整车重心G1,G1=G0 ΔG;以及 确定所述整车重心G1是否落入所述泵送安全区域中,在所述整车重心G1超出所述 泵送安全区域的情况下,不允许所述混凝土泵送设备进行泵送。 可选的,所述确定整车重心G0在泵送安全区域所在平面的投影坐标(x0,y0)包括: 设定混凝土泵送设备支腿的支撑区域为所述泵送安全区域; 在所述泵送安全区域所在平面建立坐标系;以及 将所述整车重心G0向所述坐标系进行投影以得到所述整车重心G0在泵送安全区域 所在平面的投影坐标(x0,y0)。 可选的,所述计算所述整车重心位置偏移量ΔG包括:根据所述整车重心G0计算各 节臂在混凝土输送管满管输送状态下在泵送安全区域所在平面的投影坐标(xi,yi),并根据 以下计算公式计算所述整车重心偏移量ΔG: ΔG为向量(ΔGx,ΔGy)。 可选的,所述根据所述整车重心G0计算各节臂在混凝土输送管满管输送状态下在 泵送安全区域所在平面的投影坐标(xi,yi)包括: 根据所述臂架的当前姿态以及所述混凝土质量mi计算所述各节臂重心Gi;以及 将所述各节臂重心Gi向所述坐标系进行投影以得到所述各节臂在混凝土输送管 满管输送状态下在泵送安全区域所在平面的投影坐标(xi,yi)。 本发明实施例还提供一种用于混凝土泵送设备的防侧翻控制系统,所述系统包 括: 数据获取单元,用于在当前姿态下获取臂架的其他姿态; 计算单元,用于执行以下操作: 根据所述其他姿态,计算所述混凝土泵送设备在以下两种状态之间的整车重心位 置偏移量ΔG和/或整车倾翻力矩偏移量:所述臂架的各节臂上混凝土输送管空管状态、以 及所述臂架的各节臂上混凝土输送管满管输送状态;以及 根据所述整车重心位置偏移量ΔG和/或整车倾翻力矩偏移量,确定是否允许所述 混凝土泵送设备的臂架调整到所述其他姿态。 本发明实施例还提供一种混凝土泵送设备,所述混凝土泵送设备包括上述用于混 凝土泵送设备的防侧翻控制系统。 通过上述技术方案,在计算整车重心过程中将混凝土质量信息并入相应混凝土质 量数据,以估算出混凝土泵送设备在泵送混凝土状态情况下的更加准确的整车重心,进而 可以预测出当混凝土泵送设备以当前姿态进行泵送时是否存在倾翻的危险,提高车辆作业 的安全性。 本发明实施例的其它特征和优点将在随后的











