
技术摘要:
本发明提供了一种潜望镜角度校准方法、装置和潜望镜系统,涉及潜望镜技术领域,该方法包括:首先潜望镜本体进行复位,潜望镜本体接收来自控制终端的第一校准请求,并基于第一校准请求的参考角度与传感器模块检测到的实际角度,计算出实际复位偏差角度;然后通过控制终 全部
背景技术:
潜望镜是指从海面下伸出海面或从低洼坑道伸出地面,用以窥探海面或地面上活 动的装置。其构造与普通地上望远镜相同,另加两个反射镜使物光经两次反射而折向眼中。 近年来,潜望镜在工业上有了广泛应用,管道潜望镜可以用于大型容器罐体内部视频检查, 市政排水管道快速视频勘察,隧道涵洞内部空间状况视频检测,槽罐车内部视频检测等。 潜望镜在使用前需要复位并在水平角度校准,现有技术中通常采用读取传感器数 据并换算成相应角度的方式测算出当前角度,并人为地按照角度调节传感器模块,以消除 偏差。人为校准的缺陷在于:装配人员要对每个模块焊接安装位置调节,容易对模块或者电 路板造成外力损伤,容易损坏器件以及电路板,大大增加了装配人员的工作量。并且由于重 力传感器地理位置的不同、模块差异和工作环境的差异等原因,使每次的校准时的偏差角 度不同,调节潜望镜的难度大、效率低。
技术实现要素:
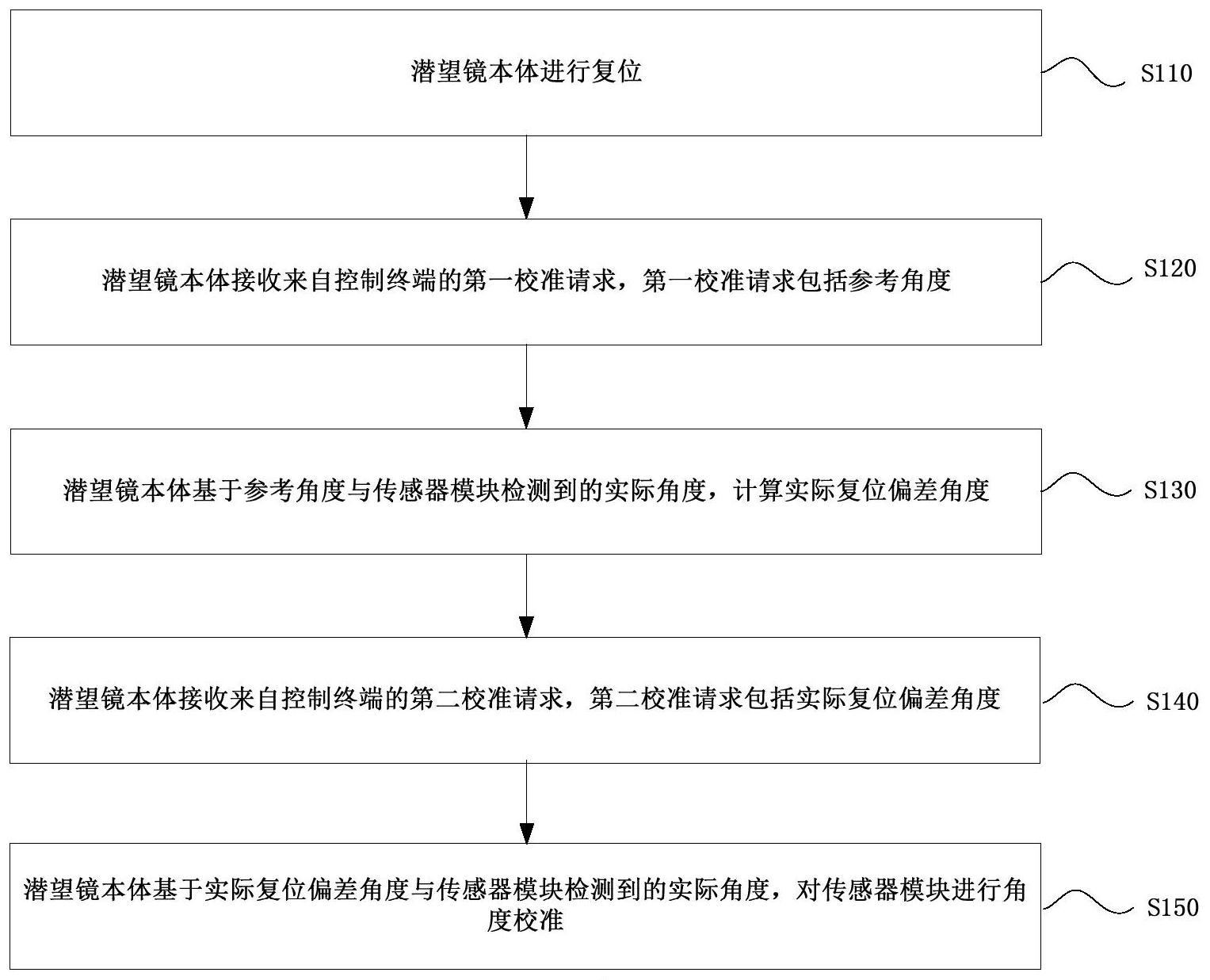
有鉴于此,本发明的目的在于提供一种潜望镜角度校准方法、装置和潜望镜系统, 以缓解现有技术中潜望镜复位时偏差角度不同导致的调节难度大、效率低的问题。 为了实现上述目的,本发明实施例采用的技术方案如下: 第一方面,本发明实施例提供了一种潜望镜角度校准方法,该方法包括: 潜望镜本体进行复位;潜望镜本体接收来自控制终端的第一校准请求,第一校准 请求包括参考角度;潜望镜本体基于参考角度与传感器模块检测到的实际角度,计算实际 复位偏差角度;潜望镜本体接收来自控制终端的第二校准请求,第二校准请求包括实际复 位偏差角度;潜望镜本体基于实际复位偏差角度与传感器模块检测到的实际角度,对传感 器模块进行角度校准。 在一些可能的实施方式中,该方法还包括:潜望镜本体检测校准后的潜望镜本体 的实际角度,用于确定实际角度不超过预设的角度范围。 在一些可能的实施方式中,潜望镜本体接收来自控制终端的第一校准请求,第一 校准请求包括参考角度的步骤,包括:潜望镜本体接收来自控制终端的第一校准请求,第一 校准请求包括参考角度;潜望镜本体将参考角度存储于存储芯片中。 在一些可能的实施方式中,潜望镜本体接收来自控制终端的第二校准请求,第二 校准请求包括实际复位偏差角度的步骤,包括:潜望镜本体接收来自控制终端的第二校准 请求,第二校准请求包括实际复位偏差角度;潜望镜本体将实际复位偏差角度存储于存储 芯片中。 在一些可能的实施方式中,方法还包括:当潜望镜角度校准系统重启时,潜望镜本 4 CN 111595359 A 说 明 书 2/10 页 体读取存储芯片中的实际复位偏差角度;潜望镜本体进行复位;潜望镜本体基于实际复位 偏差角度与传感器模块检测到的实际角度之和,对传感器模块进行角度校准。 第二方面,本发明实施例提供了一种潜望镜角度校准装置,该装置应用于潜望镜 本体;装置包括:复位模块,用于潜望镜本体进行复位;接收模块,用于接收来自控制终端的 第一校准请求,第一校准请求包括参考角度;接收模块还用于接收来自控制终端的第二校 准请求,第二校准请求包括实际复位偏差角度;计算模块,用于基于参考角度与传感器模块 检测到的实际角度,计算实际复位偏差角度;校准模块,用于基于实际复位偏差角度与传感 器模块检测到的实际角度,对传感器模块进行角度校准。 在一些可能的实施方式中,该装置还包括:检测模块,用于检测校准后的潜望镜本 体的实际角度,以确定实际角度不超过预设的角度范围。 在一些可能的实施方式中,接收模块还用于,接收来自控制终端的第一校准请求, 第一校准请求包括参考角度;接收模块还用于,将参考角度存储于存储芯片中。 第三方面,本发明实施例提供了一种潜望镜系统,该系统包括:潜望镜本体和控制 终端;潜望镜本体包括主控板、腔体外壳和步进电机;主控板包括潜望镜本体控制板MCU、传 感器模块和步进电机驱动器;主控板安装在潜望镜本体的腔体外壳内,并垂直于潜望镜本 体的外壳;控制板MCU包括存储芯片,存储芯片用于存储角度信息;传感器模块用于检测潜 望镜本体的偏移角度;步进电机驱动器用于驱动步进电机调节潜望镜的角度;潜望镜本体 与控制终端连接。 第四方面,本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储 介质存储有机器可运行指令,所述计算机可运行指令在被处理器调用和运行时,所述计算 机可运行指令促使所述处理器运行第一方面任一项所述的方法。 本申请实施例带来了以下有益效果: 本申请实施例提供的一种潜望镜角度校准方法、装置和潜望镜系统,该方法包括: 首先潜望镜本体进行复位,潜望镜本体接收来自控制终端的第一校准请求,并基于第一校 准请求的参考角度与传感器模块检测到的实际角度,计算出实际复位偏差角度;然后通过 控制终端向潜望镜本体发送第二校准请求,潜望镜本体基于第二校准请求中的实际复位偏 差角度与传感器模块检测到的实际角度,实现对所述传感器模块的角度校准,减少了人工 校准对硬件系统造成的损伤,降低复位校准潜望镜的难度、提高了校准效率,实现了减轻硬 件损耗、一次校准长期有效的有益效果。 附图说明 为了更清楚地说明本发明











