
技术摘要:
本发明公开一种核辐射环境的救灾机器人,包括一机器人本体,若干辐射传感器,一环境感知系统、一路径规划系统和一控制系统,其中机器人本体采用针对核辐射环境进行了对应的特殊工程方法设计,辐射传感器设于所述机器人本体的头部,用于检测机器人本体的周边的辐射信号 全部
背景技术:
机器人是自动执行工作的机器装置,它既可以接受人类指挥,又可以运行预先编 排的程序,也可以根据以人工智能技术制定的原则纲领行动。机器人的任务是协助或取代 人类进行工作,例如生产业、建筑业,或是危险的工作。 智能机器人具备形形色色的内部信息传感器和外部信息传感器,如视觉、听觉、触 觉、嗅觉。除具有感受器外,它还有效应器,作为作用于周围环境的手段。这就是筋肉,或称 自整步电动机,它们使手、脚、长鼻子、触角等动起来。由此也可知,智能机器人至少要具备 三个要素:感觉要素,反应要素和思考要素。 我们称这种机器人为自控机器人,以便使它同前面谈到的机器人区分开来。它是 控制论产生的结果,控制论主张这样的事实:生命和非生命有目的的行为在很多方面是一 致的。正像一个智能机器人制造者所说的,机器人是一种系统的功能描述,这种系统过去只 能从生命细胞生长的结果中得到,它们已经成了我们自己能够制造的东西了。 现有技术上,通过机器人去关闭核辐射设备的阀门,辐射信号较强的区域可能对 机器人信号传输和控制造成影响,从而导致机器人无法关闭核辐射设备的阀门。
技术实现要素:
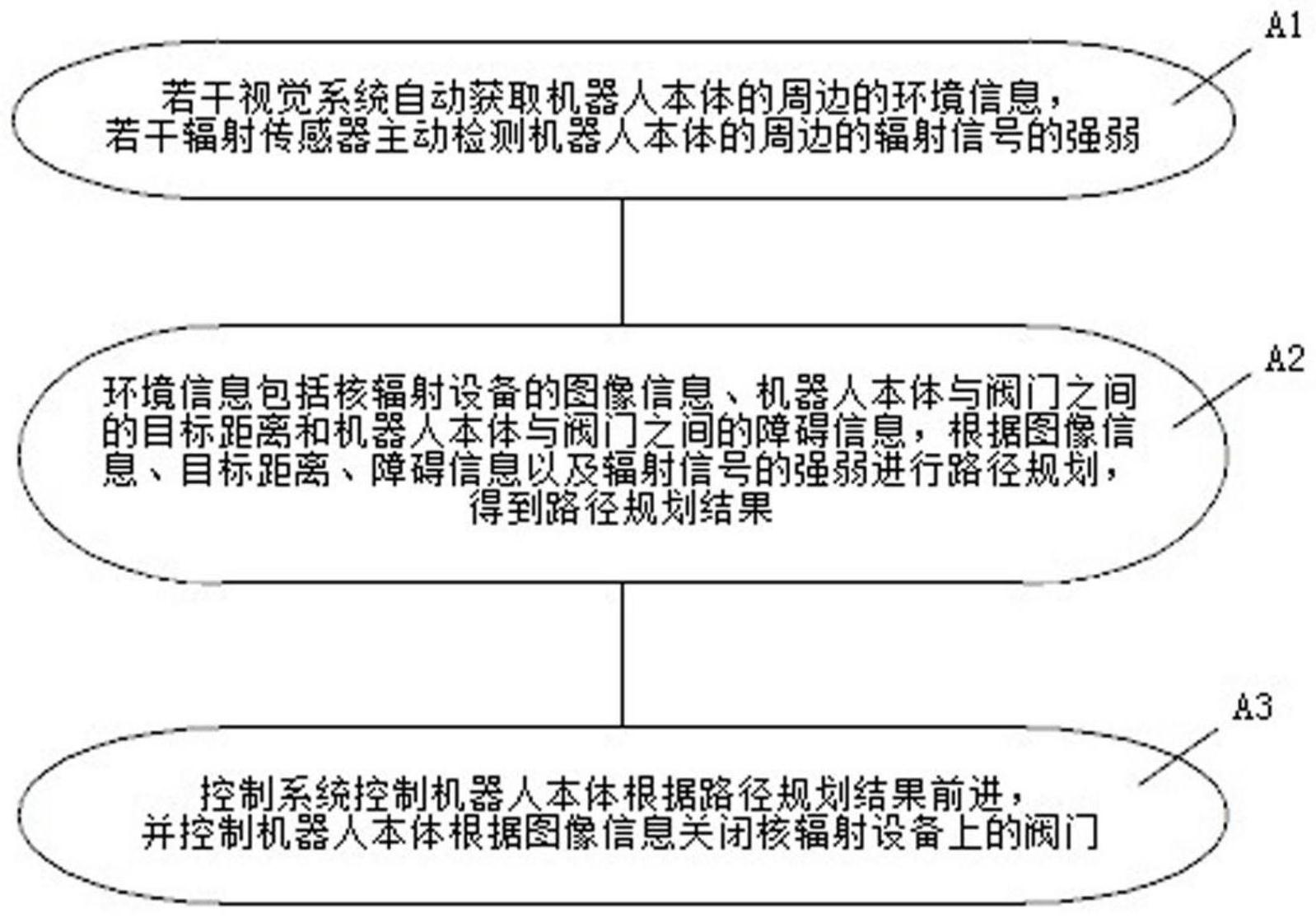
针对现有的机器人处于核辐射信号较强的区域时存在信号无法传输或无法控制 机器人行进、工作的上述问题,现旨在提供一种核辐射环境的救灾机器人,在机器人本体上 设置辐射传感器,通过辐射传感器将核辐射信号传输给机器人本体,由机器人本体进行判 断后重新规划行进路线继续前进。 具体技术方案如下: 一种核辐射环境的救灾机器人,用于关闭核辐射设备上的阀门,包括: 所述救灾机器人包括: 一机器人本体,所述机器人本体的表面涂覆有防辐射涂层,所述机器人本体的内 部各控制组件间均设置有防辐射隔层; 若干辐射传感器,若干所述辐射传感器设于所述机器人本体的头部,若干所述辐 射传感器用于检测所述机器人本体的周边的辐射信号的强弱; 若干环境感知系统,若干所述环境感知系统分别设于所述机器人本体的外侧,若 干所述环境感知系统用于获取所述机器人本体的周边的环境信息; 一路径规划系统,所述路径规划系统设于所述机器人本体内,所述路径规划系统 用于接收若干所述辐射传感器所发出的辐射信号和若干所述环境感知系统所发出的环境 信号,通过对所述辐射信号和环境信号的分析规划出所述机器人本体的行进路线; 一控制系统,所述控制系统设于所述机器人本体内,所述控制系统分别与若干所 4 CN 111590576 A 说 明 书 2/5 页 述辐射传感器、若干所述环境感知系统、所述路径规划系统信号连接,所述控制系统用于接 收所述路径规划系统所发出的路线规划信号,并控制所述机器人本体按照规划完成的所述 行进路线前进,且控制所述机器人本体对所述核辐射设备上的阀门进行关闭; 所述控制方法包括:自运行控制方法; 所述自运行控制方法包括: 步骤A1:若干所述环境感知系统自动获取所述机器人本体的周边的环境信息,若 干所述辐射传感器主动检测所述机器人本体的周边的辐射信号的强弱; 步骤A2:所述环境信息包括所述核辐射设备的图像信息、所述机器人本体与所述 阀门之间的目标距离和所述机器人本体与所述阀门之间的障碍信息,根据所述图像信息、 所述目标距离、所述障碍信息以及所述辐射信号的强弱进行路径规划,得到路径规划结果; 步骤A3:所述控制系统控制所述机器人本体根据所述路径规划结果前进,并控制 所述机器人本体根据所述图像信息关闭所述核辐射设备上的阀门。 所述控制方法还包括:遥控控制方法; 所述遥控控制方法包括: 步骤B1:所述机器人本体的遥控端获取并且转发由用户输入的控制指令,所述控 制指令为用于执行预设控制流程的控制指令,所述控制指令通过位于所述机器人本体的遥 控端的用户界面获取; 步骤B2:所述机器人本体的控制端通过无线连接方式或有线连接方式获取由所述 机器人本体的遥控端转发的所述控制指令; 步骤B3:所述机器人本体的控制端根据所述控制指令控制所述机器人本体的各个 执行终端执行对应的具体流程; 步骤B4:所述机器人本体的控制端实时向所述机器人本体的遥控端上传所述机器 人本体的实时工作状态。 上述的核辐射环境的救灾机器人,其中,所述救灾机器人还包括:速度调节系统, 所述速度调节系统设于所述机器人本体内,所述速度调节系统与所述控制系统信号连接, 所述速度调节系统用于调节所述机器人本体的行进速度。 上述的核辐射环境的救灾机器人,其中,所述路径规划系统包括: 障碍识别系统,所述障碍识别系统设于所述机器人本体上,所述障碍识别系统与 所述控制系统信号连接,所述障碍识别系统用于识别所述障碍物的位置以及所述障碍物与 所述机器人本体之间的障碍距离; 避障系统,所述避障系统设于所述机器人本体上,所述避障系统与所述控制系统 信号连接,所述避障系统用于根据所述图像信息、所述目标距离、所述障碍物的位置以及所 述障碍距离进行路径规划,得到所述路径规划结果。 上述的核辐射环境的救灾机器人,其中,所述自运行控制方法还包括: 获取周边的环境图像,并根据所述环境图像确定障碍物密集度; 获取所述机器人本体的移动速度; 根据所述障碍物密集度以及所述机器人本体的移动速度,通过所述速度调节系统 调整所述机器人本体的前进速度。 上述的核辐射环境的救灾机器人,其中,所述自运行控制方法还包括: 5 CN 111590576 A 说 明 书 3/5 页 获取所述辐射信号的强弱; 若所述辐射信号的值小于预设第一阈值时,所述机器人本体继续行进; 若所述辐射信号的值大于预设第一阈值时,所述路径规划系统重新规划所述机器 人本体的所述行进路线,所述机器人本体根据调整后的所述行进路线前进。 上述的核辐射环境的救灾机器人,其中,所述自运行控制方法还包括: 在所述目标距离大于预设的第二阈值、或所述机器人本体与所述障碍物之间的距 离小于预设的第三阈值,所述路径规划系统重新规划所述机器人本体的所述行进路线。 上述的核辐射环境的救灾机器人,其中,每一所述环境感知系统均包括: 摄像头和超声传感器、激光器或红外传感器,通过所述摄像头与所述超声传感器、 或所述摄像头与所述激光器、或所述摄像头与所述红外传感器获取所述机器人本体的周围 的环境信息。 上述的核辐射环境的救灾机器人,其中,所述有线连接方式为同轴电缆连接方式、 光纤连接方式中的一种连接方式。 上述的核辐射环境的救灾机器人,其中,所述无线连接方式为ZigBee连接方式、蓝 牙连接方式、WiFi连接方式、移动蜂窝数据网络连接中的一种连接方式。 上述技术方案与现有技术相比具有的积极效果是: (1)本发明在机器人本体的头部设置若干辐射传感器,通过辐射传感器将核辐射 信号传输给机器人本体,由机器人本体进行判断后重新规划行进路线继续前进; (2)本发明通过遥控控制方法控制机器人本体运行至目标区域内,切换成自运行 控制方式,由自运行控制方法控制机器人本体自动行进并实现核辐射设备的阀门的关闭。 附图说明 图1为本发明一种核辐射环境的救灾机器人的自运行控制方法的运行图; 图2为本发明一种核辐射环境的救灾机器人的遥控控制方法的运行图。











