
技术摘要:
本发明实施例公开了一种基于麦克纳姆轮的自动导引车及系统,该自动导引车包括车体和定位装置;车体包括装载平台和设置于装载平台上的麦克纳姆轮机构;定位装置的第一二维激光雷达和第二二维激光雷达分别设置于车体的装载面的相对的两侧;所述第一二维激光雷达和所述第 全部
背景技术:
自动导引车因具有自动化程度高、安全、灵活等特点,其能够对物料进行自动运 输、装载和卸载等,以达到节省人力成本的目的,从而被广泛应用于仓储物流、机械制造等 行业中。 但是,随着自动导引车应用领域的多样化,如何提高自动导引车的定位精度、负载 能力以及灵活性,是当前亟待解决的技术问题。
技术实现要素:
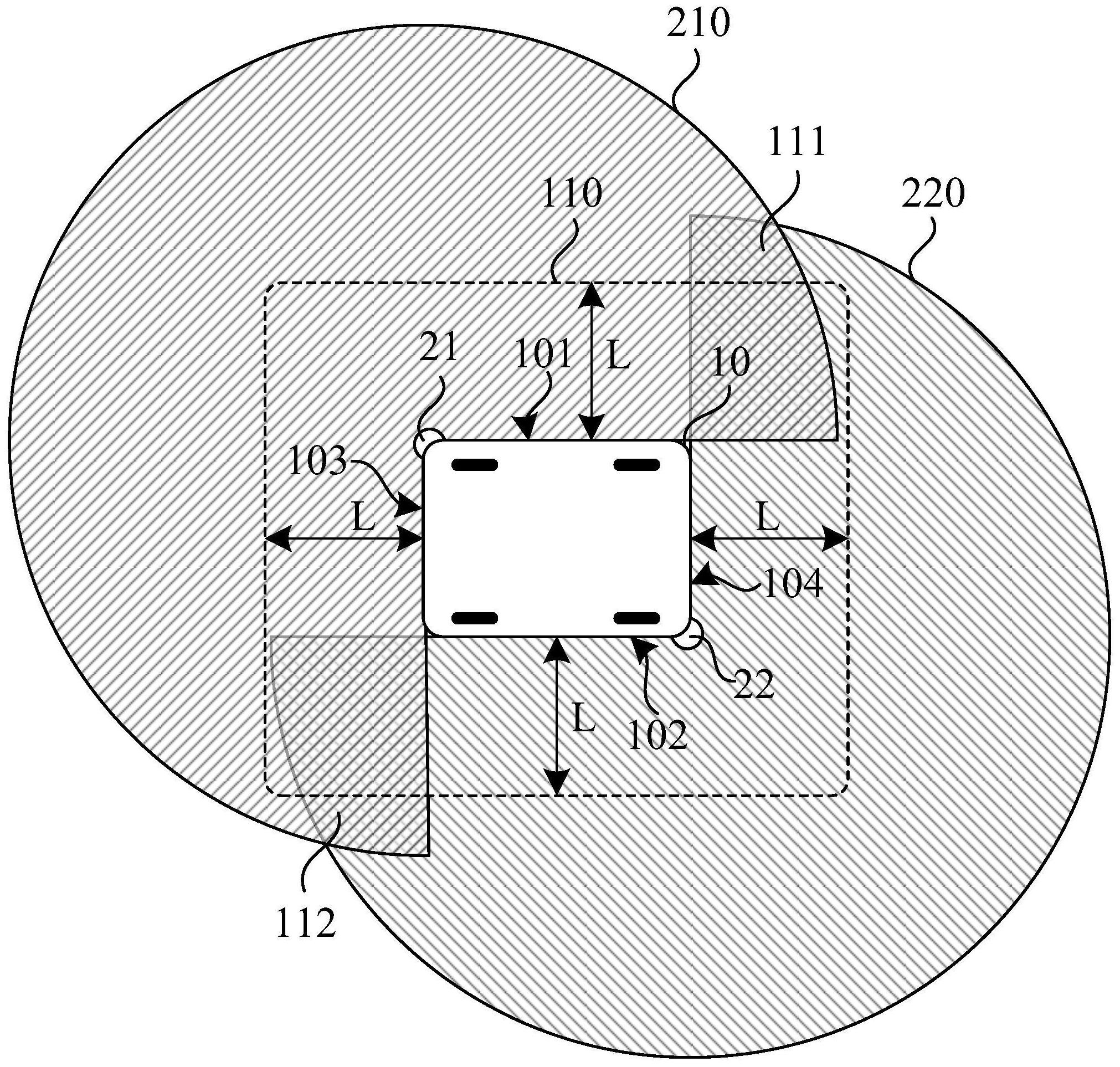
有鉴于此,本发明实施例提供一种基于麦克纳姆轮的自动导引车及系统,能够提 高自动导引车的定位精度、负载能力以及操作灵活性。 第一方面,本发明实施例提供了一种基于麦克纳姆轮的自动导引车,包括:车体和 定位装置; 所述车体包括装载平台和设置于所述装载平台上的麦克纳姆轮机构;其中,所述 麦克纳姆轮机构包括麦克纳姆轮和与所述麦克纳姆轮一一对应设置的驱动电机;所述驱动 电机驱动所述麦克纳姆轮转动; 所述定位装置包括第一二维激光雷达、第二二维激光雷达和数据处理器;所述第 一二维激光雷达和所述第二二维激光雷达分别设置于所述车体的装载面的相对的两侧;其 中,围绕所述车体的平面区域为检测区,所述检测区的宽度为L;所述第一二维激光雷达和 所述第二二维激光雷达的总平面工作区域至少覆盖所述检测区; 所述第一二维激光雷达用于获取所述第一二维激光雷达的平面工作区域的第一 环境信息,并根据所述第一环境信息生成第一数据信息; 所述第二二维激光雷达用于获取所述第二二维激光雷达的平面工作区域的第二 环境信息,并根据所述第二环境信息生成第二数据信息; 所述数据处理器分别与所述第一二维激光雷达和所述第二二维激光雷达电连接; 所述数据处理器用于接收所述第一数据信息和所述第二数据信息,并根据所述第一数据信 息和所述第二数据信息,构建当前所述第一二维激光雷达和所述第二二维激光雷达的总平 面工作区域的二维地图,以及获取所述车体的当前位置信息。 可选的,所述车体的平面外围轮廓为矩形; 所述矩形平台包括第一侧边、第二侧边、第三侧边和第四侧边,所述第一侧边与所 述第二侧边相对,所述第三侧边与所述第四侧边相对; 所述第一二维激光雷达设置于所述第一侧边与所述第三侧边的夹角位置处;所述 第二二维激光雷达设置于所述第二侧边与所述第四侧边的夹角位置处。 4 CN 111596659 A 说 明 书 2/6 页 可选的,由所述第四侧边指向所述第三侧边的方向为第一方向;有所述第三侧边 指向所述第四侧边的方向为第二方向; 所述第一二维激光雷达的主轴的延伸方向与所述第一方向的夹角θ1为45°;所述 第二二维激光雷达的主轴的延伸方向与所述第二方向的夹角θ2为45°。 可选的,所述第一二维激光雷达的工作区域为第一扇形,所述第二二维激光雷达 的工作区域为第二扇形; 所述第一扇形与所述第二扇形具有两个交叠区域,且两个所述交叠区域位于所述 车体相对的两侧。 可选的,所述第一扇形的角弧度α和所述第二扇形的角弧度β均大于等于270°。 可选的,所述第一扇形的半径r1和所述第二扇形的半径r2均大于L。 可选的,所述数据处理器包括数据获取模块、数据融合模块和SLAM模块; 所述数据获取模块用于获取所述第一数据信息和所述第二数据信息,并将所述第 一数据信息和所述第二数据信息发送至所述数据融合模块; 所述数据融合模块用于将所述第一数据信息和所述第二数据信息转化为点云数 据,并匹配拼接所述点云数据,获取拼接点云数据; 所述SLAM模块用于采用SLAM算法,根据所述拼接点云数据,构建当前所述第一二 维激光雷达和所述第二二维激光雷达的总平面工作区域的二维地图,以及获取所述车体的 当前位置信息。 可选的,所述数据处理器还包括驱动控制模块; 所述驱动控制模块用于根据所述二维地图以及所述车体的当前位置信息控制各 所述驱动电机的运行状态。 第二方面,本发明实施例提供了一种基于麦克纳姆轮的自动导引车系统,包括:控 制器和至少一个上述自动导引车; 所述控制器用于控制各所述自动导引车的运行状态。 本发明实施例提供了一种基于麦克纳姆轮的自动导引车及系统,该自动导引车包 括车体和定位装置,该自动导引车的车体中设置有麦克纳姆轮机构,从而能够实现任意方 位的灵活运动;且该麦克纳姆轮机构的驱动电机与麦克纳姆轮一一对应设置,使得一个驱 动电机能够驱动一个麦克纳姆轮,以使该麦克纳姆轮机构具有较强的驱动能力,可以采用 该麦克纳姆轮机构的车体的装载平台能够装载较重的物品,从而能够提高自动导引车的负 载能力;同时,该自动导引车的定位装置中设置有两个二维激光雷达,该两个二维激光雷达 的总平面工作区域覆盖围绕车体的检测区,以能够对车体周围360°方向的区域进行检测, 防止出现检测盲区,影响定位准确度,从而能够提高自动导引车的定位精度。 附图说明 图1是本发明实施例提供的一种自动导引车的结构框图; 图2是本发明实施例提供的一种自动导引车的车体的结构示意图; 图3是本发明实施例提供的一种自动导引车的车体的俯视结构示意图; 图4是本发明实施例提供的一种自动导引车的定位装置的结构框图; 图5是本发明实施例提供的又一种自动导引车的车体的俯视结构示意图; 5 CN 111596659 A 说 明 书 3/6 页 图6是本发明实施例提供的又一种自动导引车的结构框图; 图7是本发明实施例提供的一种自动导引车系统的结构框图。











