
技术摘要:
本发明公开了一种视觉系统复现方法、设备及计算机可读存储介质,所述视觉系统复现方法通过创建目标校验靶标来代替以往的人工测量方式来获取样机视觉系统中的标准指标数值,提升了标准指标数值的获取效率;通过在基于深度学习的缺陷检测模型的基础上还借助目标校准靶标 全部
背景技术:
对于传统机器视觉技术而言,检测具有复杂表面纹理和外观变化的部件是一个非 常严峻的挑战。而随着设计方和制造商对产品品质提出越来越高的要求,工业现场对外观 检测设备的需求却是与日俱增。近年来,随着深度学习技术的成熟应用,该难题变得可解, 越来越多设备商推出基于深度学习的外观检测设备。 但基于深度学习的检测算法一方面为了满足工业现场苛刻的检验标准,对成像效 果的一致性要求较高,另一方面算法的建立需要大量的数据集支撑,成像效果的变化会造 成原有数据集的失效。这两点造成了外观检测设备批量复制的复杂性和不可控性。目前市 面上绝大多数机器视觉厂商或检测业务设备商,在处理检测设备的的量产复制时仍采用基 于人工经验的视觉系统调试与复现的方法,人工测量并记录光学与机构参数,用于设备量 产阶段调机的参考。且在量产设备上,调机员再参考记录表进行光学以及机构的调整,然后 靠算法点检进行效果验证,重复精调直至效果最佳。如果最终无法复现效果,则需要再次对 算法进行训练,以适应新的图片效果。因此,上述的种种情况均反映出了基于人工经验的视 觉系统复现方式的效率低下的技术问题。 上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技 术。
技术实现要素:
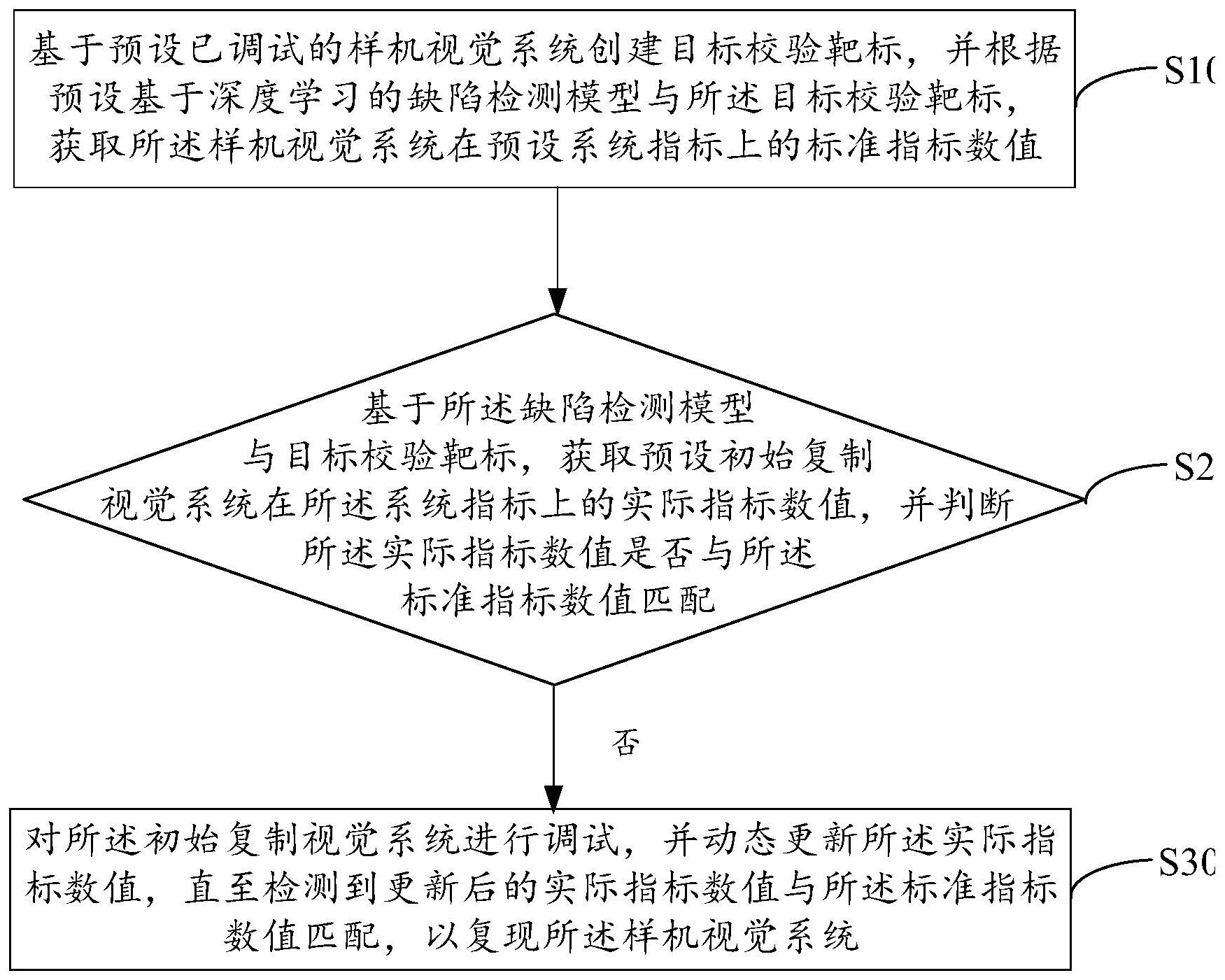
本发明的主要目的在于提供一种视觉系统复现方法,旨在解决基于人工经验的视 觉系统复现方式的效率低下的技术问题。 为实现上述目的,本发明提供一种视觉系统复现方法,所述视觉系统复现方法包 括: 基于预设已调试的样机视觉系统创建目标校验靶标,并根据预设基于深度学习的 缺陷检测模型与所述目标校验靶标,获取所述样机视觉系统在预设系统指标上的标准指标 数值; 基于所述缺陷检测模型与目标校验靶标,获取预设初始复制视觉系统在所述系统 指标上的实际指标数值,并判断所述实际指标数值是否与所述标准指标数值匹配; 若不匹配,则对所述初始复制视觉系统进行调试,并动态更新所述实际指标数值, 直至检测到更新后的实际指标数值与所述标准指标数值匹配,以复现所述样机视觉系统。 可选地,所述基于预设已调试的样机视觉系统创建目标校验靶标的步骤包括: 获取所述样机视觉系统的样机视野范围,并基于所述样机视野范围确定目标校验 靶标规格; 4 CN 111598152 A 说 明 书 2/12 页 根据所述目标校验靶标规格,创建所述目标校验靶标。 可选地,所述初始复制视觉系统中包括系统光源与工业相机, 所述基于所述缺陷检测模型与目标校验靶标,获取预设初始复制视觉系统在所述 系统指标上的实际指标数值的步骤包括: 获取所述工业相机的相机视野范围,并将所述目标校验靶标设置在所述相机视野 范围之内; 开启所述系统光源,并利用所述工业相机获取包含所述目标校验靶标的靶标图 像; 将所述靶标图像输入所述缺陷检测模型,以获取所述实际指标数值。 可选地,所述初始复制视觉系统中还包括用于调节所述工业相机位置的机械手, 所述若不匹配,则对所述初始复制视觉系统进行调试,并动态更新所述实际指标 数值,直至检测到更新后的实际指标数值与所述标准指标数值匹配,以复现所述样机视觉 系统的步骤包括: 若所述实际指标数值与所述标准指标数值不匹配,则基于所述机械手调节所述工 业相机位置、调试所述工业相机的相机参数和/或调试系统光源,以动态更新所述实际指标 数值; 直至检测到更新后的实际指标数值与所述标准指标数值匹配时,确定当前已完成 复现所述样机视觉系统。 可选地,所述直至检测到更新后的实际指标数值与所述标准指标数值匹配时,确 定当前已完成复现所述样机视觉系统的步骤之后,还包括: 将当前已完成调试的所述初始复制视觉系统确定为第一目标视觉系统,保存所述 第一目标视觉系统中所述系统光源、工业相机与机械手的配置参数,并将所述缺陷检测模 型部署在所述第一目标视觉系统中,以基于所述第一目标视觉系统量产目标检测设备。 可选地,所述判断所述实际指标数值是否与所述标准指标数值匹配的步骤之后, 还包括: 若匹配,则将所述初始复制视觉系统确定为第二目标视觉系统,并将所述缺陷检 测模型部署在所述第二目标视觉系统中,以基于所述第二目标视觉系统量产目标检测设 备。 可选地,所述判断所述实际指标数值是否与所述标准指标数值匹配的步骤包括: 获取所述实际指标数值与所述标准指标数值之间的指标差值,并判断所述指标差 值是否超出预设差值范围; 若否,则判定所述实际指标数值与所述标准指标数值匹配; 若是,则判定所述实际指标数值与所述标准指标数值不匹配。 可选地,所述系统指标包括:位置指标、视野范围指标、角度指标、焦距指标与曝光 度指标。 此外,为实现上述目的,本发明还提供一种视觉系统复现装置,所述视觉系统复现 装置包括: 指标数值获取模块,用于基于预设已调试的样机视觉系统创建目标校验靶标,并 根据预设基于深度学习的缺陷检测模型与所述目标校验靶标,获取所述样机视觉系统在预 5 CN 111598152 A 说 明 书 3/12 页 设系统指标上的标准指标数值; 指标数值匹配模块,用于基于所述缺陷检测模型与目标校验靶标,获取预设初始 复制视觉系统在所述系统指标上的实际指标数值,并判断所述实际指标数值是否与所述标 准指标数值匹配; 视觉系统复现模块,用于若不匹配,则对所述初始复制视觉系统进行调试,并动态 更新所述实际指标数值,直至检测到更新后的实际指标数值与所述标准指标数值匹配,以 复现所述样机视觉系统。 可选地,所述指标数值获取模块包括: 靶标规格获取单元,用于获取所述样机视觉系统的样机视野范围,并基于所述样 机视野范围确定目标校验靶标规格; 校验靶标创建单元,用于根据所述目标校验靶标规格,创建所述目标校验靶标。 可选地,所述指标数值匹配模块包括: 校验靶标设置单元,用于获取所述工业相机的相机视野范围,并将所述目标校验 靶标设置在所述相机视野范围之内; 靶标图像获取单元,用于开启所述系统光源,并利用所述工业相机获取包含所述 目标校验靶标的靶标图像; 实际数值获取单元,用于将所述靶标图像输入所述缺陷检测模型,以获取所述实 际指标数值。 可选地,所述视觉系统复现模块包括: 实际数值更新单元,用于若所述实际指标数值与所述标准指标数值不匹配,则基 于所述机械手调节所述工业相机位置、调试所述工业相机的相机参数和/或调试系统光源, 以动态更新所述实际指标数值; 视觉系统复现单元,用于直至检测到更新后的实际指标数值与所述标准指标数值 匹配时,确定当前已完成复现所述样机视觉系统。 可选地,所述视觉系统复现单元还用于: 将当前已完成调试的所述初始复制视觉系统确定为第一目标视觉系统,保存所述 第一目标视觉系统中所述系统光源、工业相机与机械手的配置参数,并将所述缺陷检测模 型部署在所述第一目标视觉系统中,以基于所述第一目标视觉系统量产目标检测设备。 可选地,所述视觉系统复现装置还包括: 模型部署模块,用于若匹配,则将所述初始复制视觉系统确定为第二目标视觉系 统,并将所述缺陷检测模型部署在所述第二目标视觉系统中,以基于所述第二目标视觉系 统量产目标检测设备。 可选地,所述指标数值匹配模块还包括: 指标差值判断单元,用于获取所述实际指标数值与所述标准指标数值之间的指标 差值,并判断所述指标差值是否超出预设差值范围; 指标差值判定单元,用于若否,则判定所述实际指标数值与所述标准指标数值匹 配; 若是,则判定所述实际指标数值与所述标准指标数值不匹配。 可选地,所述视觉系统复现装置还包括: 6 CN 111598152 A 说 明 书 4/12 页 系统指标模块,用于所述系统指标包括:位置指标、视野范围指标、角度指标、焦距 指标与曝光度指标。 此外,为实现上述目的,本发明还提供一种视觉系统复现设备,所述视觉系统复现 设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的视觉系统复 现程序,所述视觉系统复现程序被所述处理器执行时实现如上述的视觉系统复现方法的步 骤。 此外,为实现上述目的,本发明还提供一种计算机可读存储介质,所述计算机可读 存储介质上存储有视觉系统复现程序,所述视觉系统复现程序被处理器执行时实现如上述 的视觉系统复现方法的步骤。 本发明提供一种视觉系统复现方法、设备及计算机可读存储介质。所述视觉系统 复现方法通过基于预设已调试的样机视觉系统创建目标校验靶标,并根据预设基于深度学 习的缺陷检测模型与所述目标校验靶标,获取所述样机视觉系统在预设系统指标上的标准 指标数值;基于所述缺陷检测模型与目标校验靶标,获取预设初始复制视觉系统在所述系 统指标上的实际指标数值,并判断所述实际指标数值是否与所述标准指标数值匹配;若不 匹配,则对所述初始复制视觉系统进行调试,并动态更新所述实际指标数值,直至检测到更 新后的实际指标数值与所述标准指标数值匹配,以复现所述样机视觉系统。通过上述方式, 本发明通过创建目标校验靶标来代替以往的人工测量方式来获取样机视觉系统中的标准 指标数值,提升了标准指标数值的获取效率;通过在基于深度学习的缺陷检测模型的基础 上还借助目标校准靶标来获取量产阶段中复制视觉系统的实际指标数值,提升了实际指标 数值的获取效率;通过在实际指标数值与目标标准指标数值不匹配时不断调试复制视觉系 统,并动态观察实际指标数值是否合格,直至完成视觉系统复现,既保证了视觉系统环境复 现的准确性,同时也避免了深度学习算法的重工以及数据集的更换,还提升了系统调试过 程的可视性与智能性,大大降低了对系统部署人员的要求,极大地提高视觉系统复现的效 率,从而解决了基于人工经验的视觉系统复现方式的效率低下的技术问题。 附图说明 图1是本发明实施例方案涉及的硬件运行环境的视觉系统复现设备结构示意图; 图2为本发明视觉系统复现方法第一实施例的流程示意图; 图3为本发明视觉系统复现方法一具体实施例的流程示意图。 本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。











