
技术摘要:
本发明涉及一种橡胶树自动割胶机器人的被动柔顺仿形与切割机构。本发明主要由固定树桩机构、被动柔顺仿形机构、链式刀体组合机构组成。本发明中的链式刀体组合机构装在两个蟹钳之间的同步带上,包括多组等间距设置的刀体,每个刀体包括弧面导向板、刀体背板和浮动刀片 全部
背景技术:
橡胶作为工业设备和生活用品的制造原料,在工业生产、医疗卫生和日常生活中 作用举足轻重,对国家经济发展也有着重要的意义。其在常温下弹性好、塑性佳、具备极好 的机械强度;滞后损失小、多次变形生热低、耐屈挠性好。因其是非极性材料,电绝缘性能良 好,所以用途广泛。 随着工业不断发展,对天然橡胶的需求量不断增加,但橡胶采集工作量大、难度 大,一直以来都是限制其生产效率的瓶颈。目前,我国大部分胶园还是采用人工手持割胶刀 进行割胶,虽然近年出现了电动割胶刀,但仍未改变割胶劳动强度大、效率低、安全性差的 特点;极大地制约了橡胶产业化、商品化的发展。 近年来,随着天然橡胶价格不断下滑,割胶工流失和老龄化问题日益严重,割胶成 本急剧增加,传统割胶已经远远满足不了我国橡胶种植业的发展,胶园生产作业与管理的 机械化、智能化将是未来发展的必然趋势之一。 天然橡胶树的树桩外形类似椭圆状,树皮表面凹凸不平,为了能够在此外部条件 下保证橡胶产量,自动割胶机构就必须有柔性的仿形装置克服胶树外表不平的问题,使得 在刀具割出轨迹的过程中能够被动匹配树木的外形,达到柔性割胶的目的。 天然橡胶树的树桩直径大小不一。根据NY/T1088-2006的开割标准,选取橡胶树离 地100cm处树围达50cm(即树桩直径159mm)正式开割。而目前市面上的自动割胶装置,较为 成熟的有“一树一机”割胶装置,但该装置通用性差,很难更换树木使用,而且随着树木的成 长,装置也需进行定期的改良,加上长期暴露在户外风吹日晒,需频繁保养,设备人工维护 成本高,因此在设计自动割胶机构的时候,通用型也是需要考量的主要因素。 天然橡胶主要来自于树皮乳管细胞中的胶乳;开始割胶时,使用胶刀割去树皮的 一部分获得胶乳,而割胶深度是影响胶乳产量的重要因素,割胶深度过浅或过深都达不到 生产要求。过浅则达不到产量要求,过深则会对树体造成伤害,伤树严重时可能产生死皮, 导致胶树停止排胶。因此在设计自动割胶机器人的末端执行器时需有控制割胶深度的装置 或机构,使得每次割胶能够使机器掌控适宜的割胶深度,使产量得到提升。
技术实现要素:
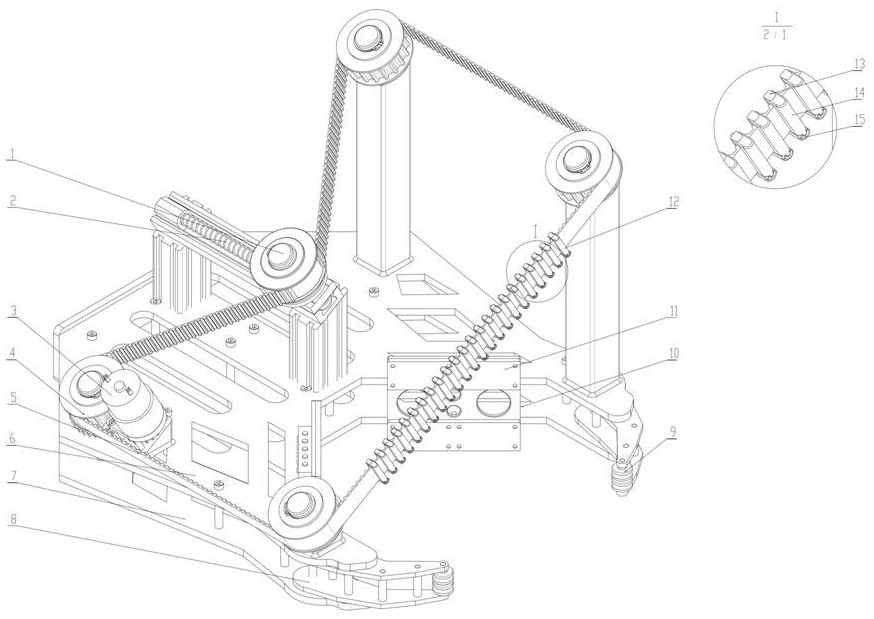
本发明的目的是为了解决上述现有技术存在的3个主要问题(仿形、通用、高产 胶),提供一种橡胶树自动割胶机器人被动柔顺仿形与切割机构。 本发明的技术方案为: 本发明主要由固定树桩机构、被动柔顺仿形机构、链式刀体组合机构组成。 4 CN 111567359 A 说 明 书 2/4 页 所述固定树桩机构包括与自动割胶机器人末端相配的基座和安装在基座前端的 一对蟹钳,该对蟹钳用于抱紧橡胶树的树桩,所述的基座前端靠近蟹钳处还设置有压力感 应器,用于触发蟹钳的动作。 所述被动柔顺仿形机构包括可调节的张紧轮、同步带和同步带轮,所述的同步带 设置于同步带轮上,并与水平面成30°夹角,所述张紧轮用于对所述同步带进行张紧。 所述的链式刀体组合机构装在两个蟹钳之间的同步带上,包括多组等间距设置的 刀体,每个刀体包括弧面导向板、刀体背板和浮动刀片,其中弧面导向板和刀体背板组合固 定在同步带上,弧面导向板面向橡胶树的树桩,弧面导向板和刀体背板组合体的下方固定 有浮动刀片,所述弧面导向板在与树桩贴合后,同时与浮动刀片的刃部存在一定的径向距 离,用于保证割胶的深度。 进一步说,所述蟹钳上还设置有滚子,用于贴合橡胶树的树桩。 进一步说,所述的压力感应器为带有应变片的挡板。 进一步说,所述的张紧轮设置在弹簧一端,弹簧另一端固定。 进一步说,相邻刀体之间的距离为20mm。 利用上述机构进行割胶的方法: 将被动柔顺仿形与切割机构安装在自动割胶机器人的末端,作为其末端执行器; 自动割胶机器人通过视觉伺服系统,控制被动柔顺仿形与切割机构径向靠近树桩,同步带 在靠近过程中,受力变形,贴合树桩;安装在同步带上的链式刀体组合随同步带一起,也贴 合树桩,达到被动柔顺仿形功能。 安装在张紧轮后方的弹簧被压缩,张紧轮沿弹簧所在的滑轨后退,此时压力感应 器亦靠近树桩,并与树桩接触受压发生形变,当形变量达到设定阈值时,触发蟹钳合拢;蟹 钳上的滚子贴上树桩后,停止合拢;此时被动柔顺仿形与切割机构抱紧树桩,起到固定树桩 作用。 自动割胶机器人通过视觉伺服系统辅助,驱动电机反转,链式刀体组合随同步带 由下向上移动,当链式刀体组合中的第一把浮动刀片到达橡胶树起割线后,电机停止反转; 然后蟹钳松开,自动割胶机器人控制被动柔顺仿形与切割结构竖直向下移动,视觉伺服系 统判断浮动刀片的刃口贴上树皮后,停止下移,蟹钳合拢,再次抱紧树桩;然后电机开始正 转,通过各同步带轮带动同步带及链式刀体组合沿树桩做自上而下,螺纹角为30°的螺旋运 动进行割胶。 当链式刀体组合中的最下方的刀片来到树桩收刀点位置处时,电机停止转动,自 动割胶机器人控制被动柔顺仿形与切割机构沿反径向方向退出,完成割胶。同时张紧轮受 弹簧的弹力作用,使其沿滑轨向链式刀体组合的方向移动,而同步带及安装在上面的链式 刀体组合在离开树桩的过程中逐渐变直,完成复位。 本发明的有益效果:本发明提供了一种用于自动割胶机器人的末端执行器,即一 种自动割胶机器人被动柔顺仿形与切割机构。该机构具备仿形、通用和高产胶的性能,填补 了目前市面上自动割胶设备的诸多不足,对橡胶树的自动割胶,减少橡胶树割胶成本,改善 胶工的作业条件都起到了积极作用。本发明所提供的被动柔顺与切割机构具有结构简单, 工作空间大,效率高,适用不同树木直径,高产胶、最大限度保护胶树等特点,具有极大的推 广、使用价值和广阔的市场前景。 5 CN 111567359 A 说 明 书 3/4 页 附图说明 图1为被动柔顺仿形与切割机构切割前状态; 图2为链式刀体组合(单个刀体); 图3为被动柔顺仿形与切割机构切割过程图; 图4为割胶过程示意图。











