
技术摘要:
本发明涉及一种具有非对称旋翼的共轴双旋翼飞行器及其操控方法。该飞行器包括机身、安装在机身上方的驱动电机一、安装在驱动电机一上方的上旋翼、安装在机身下方的驱动电机二和安装在驱动电机二下方的下旋翼。上旋翼包括与驱动电机一的转轴相连的电机连接座一以及非对 全部
背景技术:
旋翼式飞行器是航空领域中常见的飞行器构型。在现实中常见的直升机、旋翼机、 多旋翼式无人机均属于旋翼式飞行器,其一般采用燃油动力、电动力发动机驱动旋转翼使 其旋转,产生推进力以及姿态调节力矩实现飞行及飞行姿态控制。旋翼式飞行器以其特殊 的飞行方式具有易于制造、机动灵活等优势广泛应用于军事、农业、交通运输等诸多领域。 在众多旋翼式飞行器构型中,共轴双旋翼构型是重要的组成部分,其主要特征为 两只旋翼上下层叠且静止状态下转轴共线,在运行过程中上下旋翼转向相反,且飞行器重 心位于旋翼旋转轴线上,其一般采用燃油动力发动机或电动力发动机来驱动旋转翼旋转。 为了产生使机身俯仰、横滚的姿态调节力矩通常采用使旋翼旋转轴线倾转的倾转机构,通 过旋翼倾转机构使旋翼旋转轴线前后、左右倾转,让旋翼升力中心从飞行器重心分别向前 后、左右偏移产生姿态调节力矩实现飞行器俯仰、横滚调节;此外,对于大型的共轴双旋翼 飞行器,一般采用燃油动力发动机,由于燃油发动机调速性能差,无法通过调速的方式调节 上、下旋翼转速差的方式进行偏航运动调节,所以基于燃油动力发动机驱动的共轴双旋翼 飞行器还需要额外的变距机构来产生使机身偏航运动的力矩。因此,传统的共轴双旋翼飞 行器旋翼系统部件众多,结构极为庞杂,这不仅在一定程度上加大了制造、整备以及运行维 护的难度,也降低了飞行器运行的可靠性。
技术实现要素:
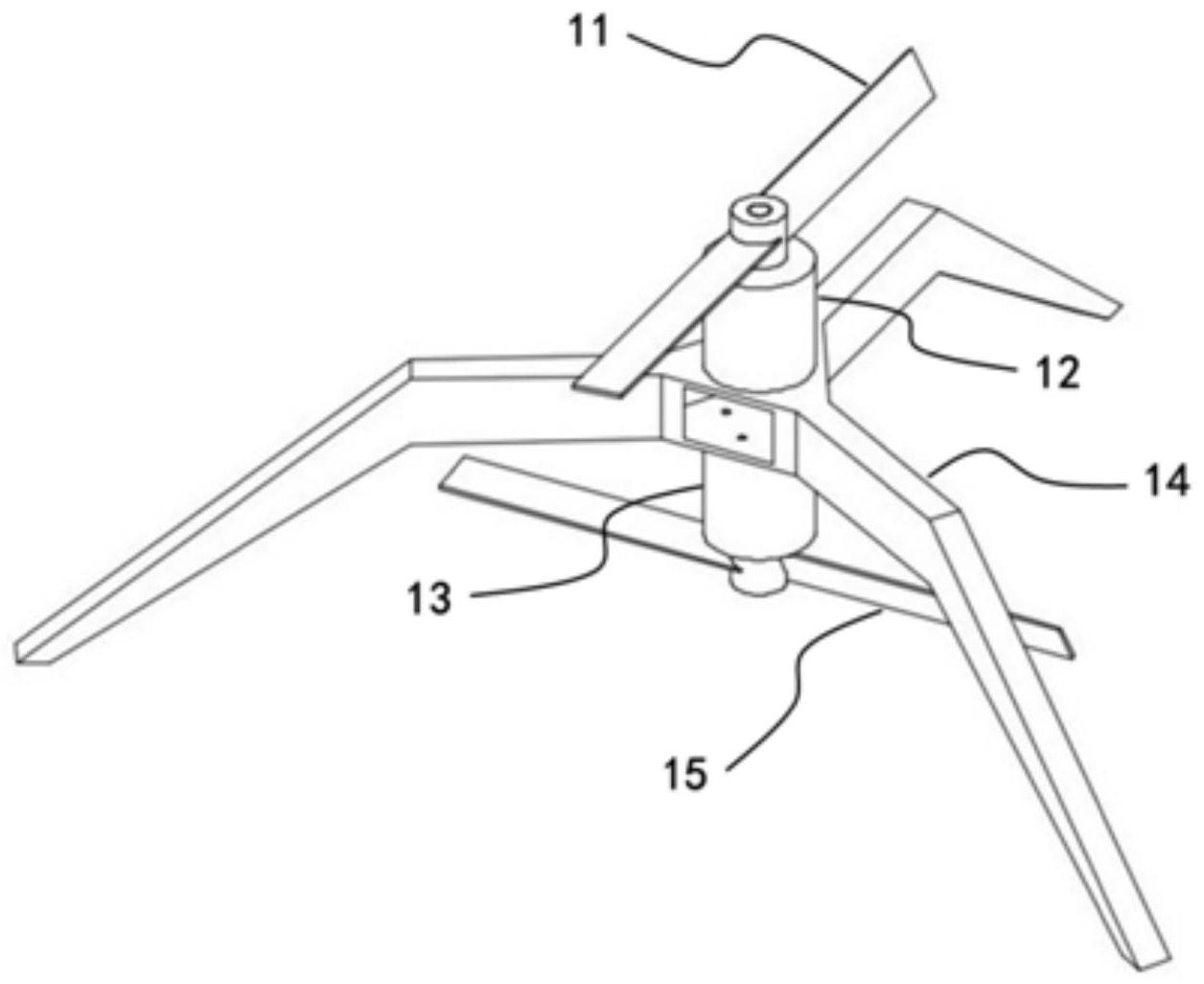
本发明的目的在于提供一种具有非对称旋翼的共轴双旋翼飞行器及其操控方法, 该共轴双旋翼飞行器及其操控方法,无需旋翼倾转机构和变距机构即可实现俯仰、横滚、偏 航全自由度的姿态可控飞行,极大地简化了飞行器机械结构,降低了部件制造、装配以及维 护难度,提升了运行的可靠性。 为实现上述目的,本发明采用了以下技术方案: 一种具有非对称旋翼的共轴双旋翼飞行器,该飞行器包括机身、安装在机身上方 的驱动电机一、安装在驱动电机一上方的上旋翼、安装在机身下方的驱动电机二和安装在 驱动电机二下方的下旋翼。 所述上旋翼包括与驱动电机一的转轴相连的电机连接座一以及非对称设置在电 机连接座一两侧的上旋翼主叶片与上旋翼副叶片;所述下旋翼包括与驱动电机二的转轴相 连的电机连接座二以及非对称设置在电机连接座二两侧的下旋翼主叶片与下旋翼副叶片。 进一步的,所述上旋翼主叶片的螺距大于上旋翼副叶片的螺距;所述下旋翼主叶 片的螺距大于下旋翼副叶片的螺距;所述上旋翼主叶片与上旋翼副叶片的螺距之差与所述 下旋翼主叶片与下旋翼副叶片的螺距之差相等。 4 CN 111547236 A 说 明 书 2/5 页 进一步的,所述上旋翼主叶片除螺距外的参数与所述上旋翼副叶片除螺距外的参 数(翼型、翼面积、翼展以及相对驱动电机一的转轴的转动惯量)相同;所述下旋翼主叶片除 螺距外的参数与所述下旋翼副叶片除螺距外的参数(翼型、翼面积、翼展以及相对驱动电机 二的转轴的转动惯量)相同。 进一步的,所述机身包括机身主体以及沿机身主体外周均匀设置的若干支撑腿; 所述机身主体包括自上向下依次设置的上电机座与下电机座;所述支撑腿的一端连接在上 电机座与下电机座之间,另一端向外伸出;所述上电机座和下电机座上均开设有若干电机 安装孔。 进一步的,所述电机连接座一和电机连接座二上均开设有转轴安装孔。 进一步的,所述驱动电机一和驱动电机二均包括电机主体、开设在电机主体底部 的若干连接孔和设置在电机主体顶部的转轴。 本发明还涉及一种上述具有非对称旋翼的共轴双旋翼飞行器的操控方法,该方法 包括以下步骤: 将上旋翼一个旋转周期以Pitch轴为界平均分为2个象限:第一象限、第二象限;将 下旋翼一个旋转周期以Roll轴为界平均分为2个象限:第三象限、第四象限;设Roll轴正方 向箭头指向为机首方向,上旋翼在一个旋转周期内的平均角速度与下旋翼在一个旋转周期 内的平均角速度的平均值为ω;上旋翼在一个旋转周期内的平均角速度与下旋翼在一个旋 转周期内的平均角速度之差为δω,即上旋翼在一个旋转周期内的平均角速度为: 下旋翼在一个旋转周期内的平均角速度为: 在一个旋转周期内,上旋翼 主叶在第一象限的平均角速度与其在第二象限的平均角速度之差为δωU,下旋翼主叶在第 三象限的平均角速度与其在第四象限的平均角速度之差为δωD,即在一个旋转周期内,上 旋翼主叶在第一象限的平均角速度为: 上旋翼主叶在第二象限的平均角 速度为: 下旋翼主叶在第三象限的平均角速度为: 下旋 翼主叶在第四象限的平均角速度为: 通过调节δωU的大小及正负,即可调节上旋翼在一个旋转周期内产生的俯仰力矩 的大小及方向,继而实现对飞行器机体俯仰运动的调节;通过调节δωD的大小及正负,即可 调节下旋翼在一个旋转周期内产生的横滚力矩的大小及方向,继而实现对飞行器机体横滚 运动的调节;通过调节δω的大小及正负,即可调节上旋翼、下旋翼在旋转过程中产生的偏 航力矩的大小及方向,继而实现对飞行器机体偏航运动的调节。 较之于传统的共轴双旋翼飞行器,本发明所述的具有非对称旋翼的共轴双旋翼飞 行器的结构更加简单,只需两只旋翼及其相应的驱动电机即可同时实现俯仰、横滚、偏航全 自由度的姿态控制,极大地简化了共轴双旋翼飞行器的机械结构,进而有效提升了运行的 可靠性。 5 CN 111547236 A 说 明 书 3/5 页 附图说明 图1是本发明中共轴双旋翼飞行器的整体结构示意图; 图2是本发明中上旋翼的结构示意图; 图3是本发明中下旋翼的结构示意图; 图4是本发明中旋翼驱动电机的结构示意图; 图5是本发明中飞行器机身的结构示意图; 图6是本发明中飞行器机体坐标系及旋转运动示意图; 图7是本发明中飞行器旋翼旋转平面分割示意图。 其中: 11、上旋翼,12、驱动电机一,13、驱动电机二,14、机身,15、下旋翼,21、上旋翼主叶 片,22、电机连接座一,23、上旋翼副叶片,31、下旋翼副叶片,32、电机连接座二,33、下旋翼 主叶片,41、转轴,42、连接孔,51、上电机座,52、支撑腿,53和54均为电机安装孔,55、下电机 座。











