
技术摘要:
本发明涉及物流设备技术领域,公开了一种袋包夹具,其包括:第一安装部,其顶端用于连接夹包装置的执行端;伸缩机构,其顶端连接于所述第一安装部;取放组件,其转动连接于所述伸缩机构的底端,所述取放组件用于取放所述袋包;其中,所述伸缩机构设为至少三个,且若干 全部
背景技术:
目前,随着自动化程度地逐步提高,智能物流领域得到迅速发展,仓库、工厂车间、 港口和码头等许多场所的货物装卸工作越来越多,急需智能化程度高和柔性好的拆垛机器 人来取代人工拆垛。但是,传统的拆垛机器人对剁型和货物的规格的适应性较差,经常出现 严重的破包或者货物损坏的现象,因而会造成极大的经济损失。
技术实现要素:
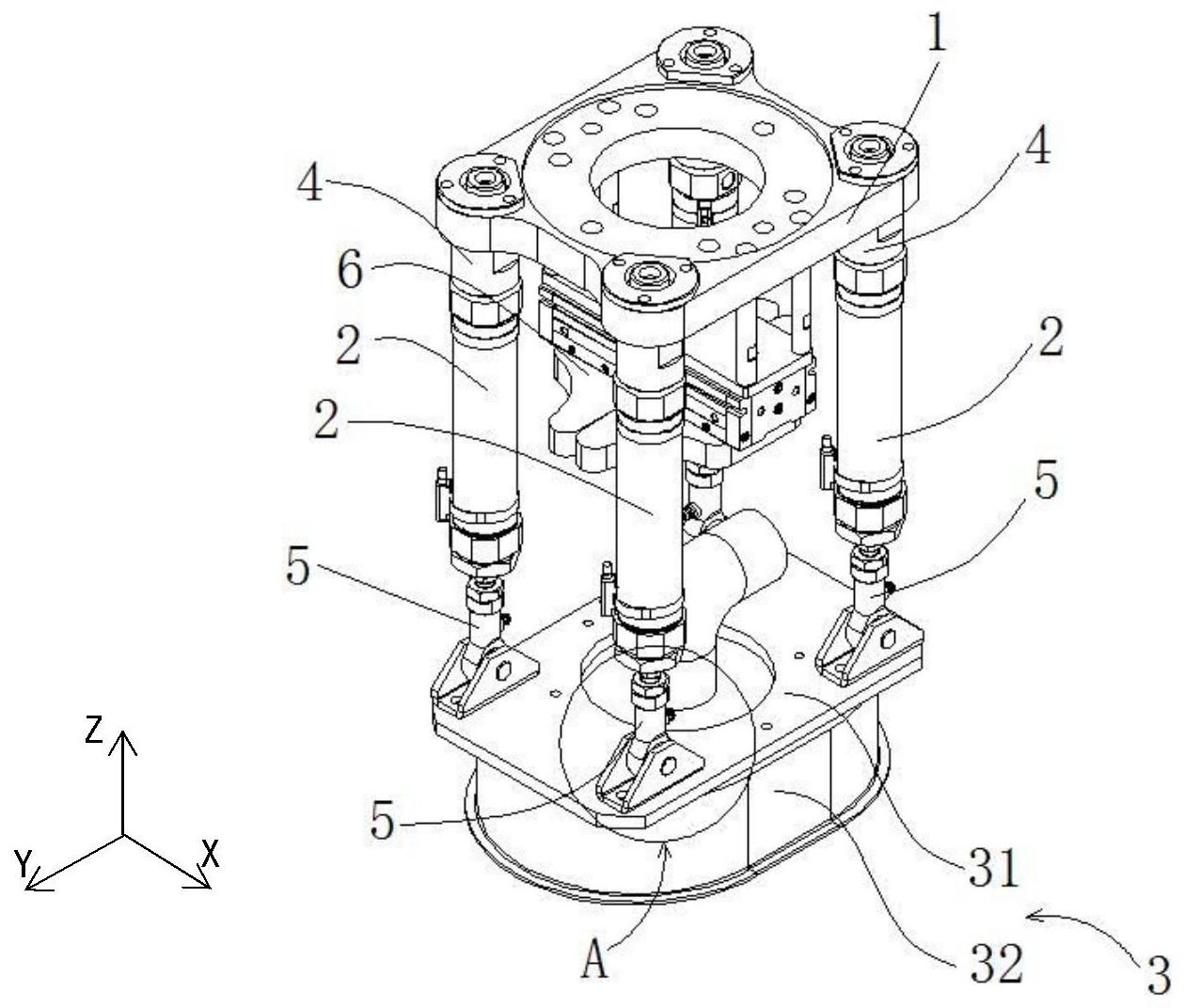
本发明要解决的技术问题是:本发明提供了一种袋包夹具及夹持袋包方法,以解 决现有技术中的拆垛机器人对剁型和货物的规格的适应性较差,经常出现严重的破包或者 货物损坏的现象的问题。 为了解决上述技术问题,本发明提供了一种袋包夹具,其包括: 第一安装部,其顶端用于连接夹包装置的执行端; 伸缩机构,其顶端连接于所述第一安装部; 取放组件,其转动连接于所述伸缩机构的底端,所述取放组件用于取放所述袋包; 其中,所述伸缩机构设为至少三个,且若干所述伸缩机构平行布置。 可选的,所述伸缩机构为四个,四个所述伸缩机构呈矩形阵列布置于所述第一安 装部的底端。 可选的,所述伸缩机构的顶端连接于所述第一安装部的顶端,所述伸缩机构的动 力输出端转动连接于所述取放组件的顶端。 可选的,所述伸缩机构连接有驱动其在高压状态或者低压状态下运行的调压单 元。 可选的,所述伸缩机构的顶端通过第一万向连接件连接于所述第一安装部的顶 端。 可选的,所述第一万向连接件包括万向关节轴承和连接杆,所述万向关节轴承设 于所述第一安装部,且所述万向关节轴承套装于所述连接杆; 所述连接杆的底端与所述伸缩机构的顶端连接。 可选的,所述取放组件通过第二万向连接件连接于所述伸缩机构的底端,所述第 二万向连接件为球形关节轴承,所述球形关节轴承的固定端固定于所述伸缩机构的底端, 所述球形关节轴承的活动端与所述取放组件转动连接。 可选的,所述取放组件包括第二安装部、吸盘、控制阀和抽真空装置,所述第二安 装部的顶部与所述第二万向连接件连接,所述吸盘连接于所述第二万向连接件的顶部,所 述吸盘与所述抽真空装置通过所述控制阀连接。 可选的,所述取放组件还包括用于检测所述吸盘内是否处于真空状态的真空检测 4 CN 111546371 A 说 明 书 2/7 页 装置。 可选的,本发明的袋包夹具还包括用于限制所述伸缩机构在X轴上移动和在Y轴上 移动的限位机构。 可选的,,所述限位机构包括两个气爪和推动气缸,所述推动气缸设于所述第一安 装部的底端,两个所述气爪设于所述推动气缸的动力输出端,所述推动气缸驱动两个所述 气爪沿X轴或者Y轴做相对移动或者相向移动。 为了达到相同的目的,本发明实施例还提供了一种通过袋包夹具夹持袋包的方 法,所述袋包夹具包括第一安装部、伸缩机构和取放组件,所述伸缩机构连接于所述第一安 装部,所述伸缩机构的动力输出端转动连接于所述取放组件的顶端,其包括如下步骤: S1、下降阶段:各所述伸缩机构伸出,以使所述取放组件下移至取件准备位置; S2、阻尼准备阶段:将各所述伸缩机构调压至低压状态; S3、阻尼拾取阶段:将所述袋包夹具下移,以使所述取放组件接触到所述袋包,并 根据所述袋包的形态进行顺从变化,在顺从变化过程中,各所述伸缩机构的动力输出端会 发生不同程度的收缩,若在顺从变化后,所述取放组件的吸盘能形成真空,则进行步骤S5; 若在顺从变化后,所述取放组件的吸盘不能形成真空,则进行步骤S4; S4、高压纠偏阶段:将各所述伸缩机构调压至高压状态,重复将其中一个所述伸缩 机构向下压或者两个以上所述伸缩机构同时向下压或者多个所述伸缩机构按顺序向下压, 直至所述取放组件的吸盘能形成真空; S5、上提阶段:将所述袋包夹具向上提起,当所述袋包提起后,所述伸缩机构缩回, 以使所述取放组件上移至放件准备位置。 本发明实施例一种袋包夹具及夹持袋包方法与现有技术相比,其有益效果在于: 本发明实施例的袋包夹具,通过设置伸缩机构,伸缩机构的伸缩运动能带动取放 组件在Z轴进行移动,并且由于伸缩机构的顶端转动连接于第一安装部的顶端,从而使得伸 缩机构和取放组件能沿着X轴和Y轴移动; 此外,取放组件转动连接于伸缩机构的底端,当若干伸缩机构的伸缩量为相同值 时,取放组件能沿着Z轴移动;当若干伸缩机构的伸缩量不同时,取放组件的顶端会产生Z向 高度差,从而使得取放组件能绕着X轴和Y轴进行转动; 同时,第一安装部的顶端用于连接夹包装置的执行端,夹包装置能带动整个袋包 夹具绕着Z轴进行转动; 因此,本发明实施例的袋包夹具在空间具有六个自由度,取放组件能根据袋包的 外形在空间内任意旋转和平移,直至取放组件的捉取面与袋包的外形相适配,从而提高袋 包夹具对袋包的适应性和提高对袋包拆垛的成功率,进而具有一定的推广性; 本发明实施例的夹持袋包方法,通过在下降阶段将各伸缩机构伸出,直至取放组 件下移至取件准备位置,以使得袋包夹具能在取件区域内对袋包进行夹取;通过在阻尼准 备阶段将各伸缩机构调压至低压状态,以使得伸缩机构的动力输出端能够平稳地移动,进 而便于袋包夹具的顺从变化过程;通过在阻尼拾取阶段进行袋包夹具整体向下移动以及各 伸缩机构进行顺从变化,以使得取放组件实现对袋包的初步吸取;通过在高压纠偏阶段将 各伸缩机构调压至高压状态,并且重复将其中一个伸缩机构向下压或者两个伸缩机构向下 压或者多个伸缩机构按顺序向下压,伸缩机构在下压过程中,取放组件的顶端会产生Z向的 5 CN 111546371 A 说 明 书 3/7 页 高度差,取放组件能绕着X轴和Y轴进行转动,同时配合伸缩机构在X轴、Y轴和Z轴方向上的 移动、以及整个袋包夹具绕着Z轴的转动,从而使得取放组件能适应不同形态的袋包,进而 使得取放组件的吸盘能形成真空;通过在上提阶段将各伸缩机构缩回,避免袋包夹具在运 行过程中对处于伸出状态的伸缩机构造成损坏。 因此,本发明实施例的夹持袋包方法能提高袋包夹具对袋包的适应性和对袋包拆 垛的成功率,从而具有一定的推广性。 附图说明 图1是本发明实施例的袋包夹具在伸缩机构处于收缩状态下的结构示意图一。 图2是图1在A处的结构示意图。 图3是本发明实施例的袋包夹具在伸缩机构处于收缩状态下的结构示意图二。 图4是图3在B处的结构示意图。 图5是本发明实施例的袋包夹具在伸缩机构处于伸展状态下的结构示意图一。 图6是本发明实施例的袋包夹具在伸缩机构处于伸展状态下的结构示意图二。 图7是本发明实施例的袋包夹具在顺从状态下的结构示意图。 图8是本发明实施例的袋包夹具的机械原理图。 图中,1、第一安装部;2、伸缩机构;3、取放组件;31、第二安装部;32、吸盘;4、第一 万向连接件;41、万向关节轴承;42、连接杆;5、第二万向连接件;51、固定端;52、活动端;6、 限位机构;61、气爪;62、推动气缸;7、转轴;8、支架。











