
技术摘要:
本发明公开了一种基于像素密度K均值聚类团雾识别算法,包括以下步骤:S1.通过高速摄像机捕捉区域图像,输入图像集,进行图像网格分割,计算每个网格内团雾的像素密度,判定团雾区域;S2.团雾区域内团雾像素密度提取;S3.计算团雾像素密度均值与方差,将均值与方差组成 全部
背景技术:
近年来,由于“团雾”的影响,导致高速公路和海上船舶频频发生交通安全事故,根 据WMO气象组织的定义,团雾的悬浮液滴很小,通常在空气中属于微观的液滴,一般在地表 面上的水平能见度小于1公里。据气象研究表明,大部分的团雾属于辐射雾,是由接近下垫 面的气团冷却引起的。因此,团雾具有突发性、局地性、尺度小、浓度大的特征。 在团雾检测识别技术领域,团雾的检测与识别大多应用于高速公路,通过自动气 象站采集,利用视频图像分析处理技术,进行团雾现象模糊识别,但仅仅依赖于实时团雾检 测,无法达到提前预警效果,因此,海量采集团雾图像数据信息,分析团雾要素特征,构建典 型团雾要素特征集,实现气象条件快速靶向识别,对提高气象预警,具有重要意义。 现有的团雾实时监测方法,通过光学光束穿透团雾层,根据反射信号强弱判断团 雾等级,该方法受仪器装置精密性、安装工艺性影响较大,分析结果与实际情况误差较大, 检测精度可靠性不足,最重要是,该类方法不能充分结合所有图像信息进行团雾要素特征 提取,无法进行快速、精确的团雾识别。
技术实现要素:
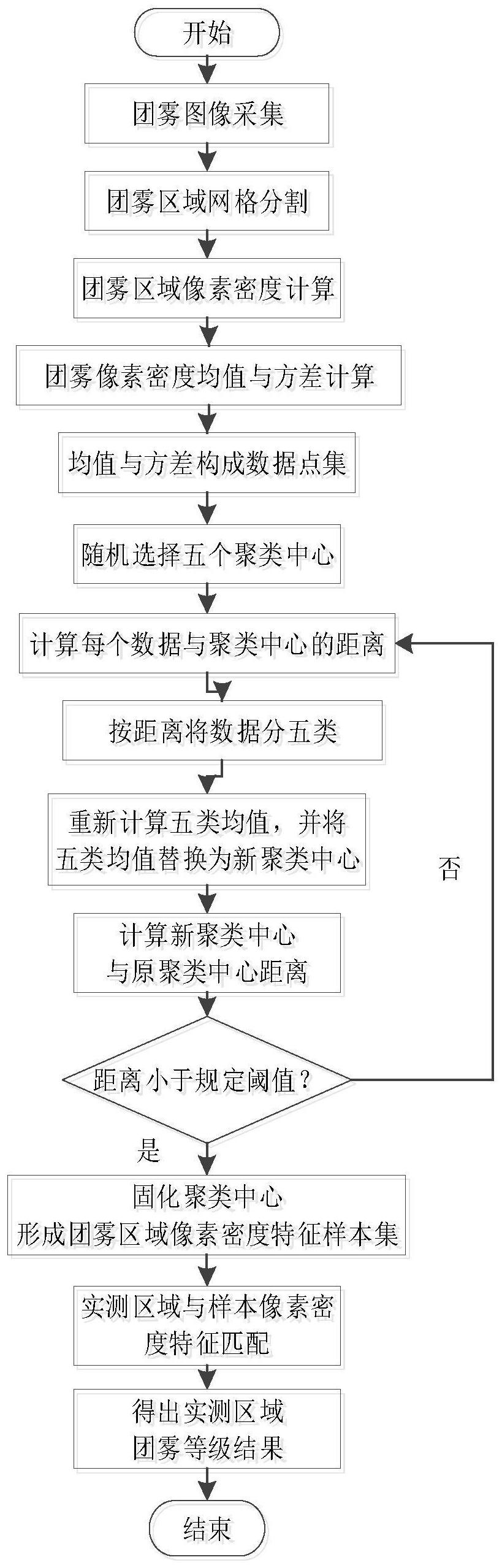
为了解决上述问题,本发明提供了一种基于像素密度K均值聚类团雾识别算法,该 发明基于海量团雾图像数据,通过提取海量团雾图像特征作为样本集,以团雾等级为判别 界限,通过实测区域图像特征与样本特征进行靶向匹配识别,该方法检测识别速度快,精确 度高,且收敛速度快,大幅度降低了误检率,保证了正确率。技术方案为, 一种基于像素密度K均值聚类团雾识别算法,包括以下步骤: S1 .通过高速摄像机捕捉区域图像,输入图像集,进行图像网格分割,计算每个网 格内团雾的像素密度,判定团雾区域; S2.计算团雾区域内团雾像素密度; S3.计算团雾像素密度均值与方差,将均值与方差组成代表团雾图像的二维数据 点,并将所有图像数据点组成数据集合; S4.根据团雾等级划分指标,在数据集合中随机选择五个二维数据点,作为初始聚 类中心; S5.遍历所有数据,逐一计算与聚类中心的距离,根据距离大小,将所有数据分为 五类; S6.迭代计算准则函数,直至满足阈值要求,算法收敛,输出团雾识别等级结果。 进一步的,步骤S1中,判定团雾区域的具体步骤包括, S11 .将图像统一尺寸,对图像网格进行分割,并逐一计算每个网格内团雾像素密 4 CN 111553405 A 说 明 书 2/5 页 度, 式(1)中,Ai表示第i个网格内团雾像素密度;ni表示第i个网格内团雾像素个数,Ni 表示第i个网格内全部像素个数; S12.判断每个图像分割网格内的雾像素密度,保留Ai≥0.3的有效网格,剔除Ai< 0.3的无效网格;将有效网格进行连接,构成图像内的团雾区域。 进一步的,将有效网格内团雾像素密度进行汇总,计算团雾区域内团雾像素密度; 式(2)中,S表示团雾区域内团雾像素密度,D表示有效网格数量,Aj表示第j个有效 网格的团雾像素密度。 进一步的,步骤S3中,计算图像集内所有图像的团雾区域内团雾像素密度均值和 方差; 式(3)中,M表示团雾区域内团雾像素密度均值,Q表示图像数量,Sk表示第k张图像 的团雾区域内团雾像素密度;P表示团雾区域内团雾像素密度方差。 进一步的,步骤S3中,将团雾区域内团雾像素密度均值M与方差P组成代表团雾图 像的二维数据点(M,P),将图像集内所有代表团雾图像的二维数据点(M,P)构成一个数据集 I。 进一步的,步骤S4中,从数据集I中随机选取5个二维数据点b1、b2、b3、b4、b5作为初 始聚类中心。 进一步的,步骤S5中,遍历数据集I内所有二维数据点,逐一计算与初始聚类中心 b1、b2、b3、b4、b5的马氏距离, d(x,br)=[(x-b )TH-1r (x-br)]1/2(r=1,2,3,4,5) (5) 式(5)中,d(x,br)表示逐一数据与初始聚类中心的马氏距离,x表示历数据集I内 的任一数据点,(x-b Tr) 表示转置矩阵,H表示数据集I中所有数据点的协方差矩阵,r表示五 类。 进一步的,步骤S5中,根据马氏距离计算值,将数据点分类到距离初始聚类中心br 最近的类中,计算各类中的均值; 式(6)中,mr表示第r类中数据均值,F表示第r类中的数据点的数量,xrq表示第r类 中第q个数据点; 将计算完成的各类均值作为本类中的新的聚类中心,替换初始聚类中心。 5 CN 111553405 A 说 明 书 3/5 页 进一步的,步骤S6中,建立准则函数,用于计算各类中新的聚类中心与初始聚类中 心的距离, Δ=|mr-br|(r=1,2,...,5) (7) 式(7)中,Δ表示新的聚类中心与初始聚类中心的距离。 进一步的,步骤S6中,给定阈值δ,若Δ≤δ,则算法收敛,输出团雾识别结果;若Δ> δ,则回到S5,进行算法迭代,直至满足Δ≤δ,算法收敛,输出团雾识别结果。 有益效果 本发明是基于团雾区域像素密度的一种改进K均值聚类的团雾特征靶向匹配识别 算法,该算法有效改进了团雾特征识别的传统视觉图像分析算法,提取海量团雾图像像素 密度特征构成样本集,将实测区域图像像素密度特征与样本特征对比识别匹配,本发明具 有特征集丰富、特征稳定、识别快速、识别精度高等优点,大幅度降低了误检率,保证了正确 率,增强了自适应性。 附图说明 图1为本发明的一种团雾特征靶向匹配识别算法流程图; 图2为本发明的团雾区域网格判定示意图; 图3为本发明的团雾识别算法实验验证图;











