
技术摘要:
本发明针对铁路各车场车列实施防溜效率低下,影响车辆周转时效,存在安全隐患的问题,公布了一款通过人工智能技术控制铁鞋机器人配套系统完成铁鞋机器人自动实施防溜的技术设备,本发明铁鞋机器人配套系统工作原理主要由铁鞋走行车控制模块提供电能并对铁鞋走行车升降 全部
背景技术:
铁鞋防溜制动一直是铁路车务工作的重要基础部分,长期以来铁鞋防溜技术都是 通过人工手动 实施的,在防溜过程中工作人员需从铁鞋箱内提出沉重的铁鞋,步行很长一 段距离来到需要做防溜的车列 轮对附近,然后与相关司机或其他车列管理人员联控后,爬 到车列底下的钢轨上,将铁鞋放置在轨面上并 紧靠在车辆的轮对下,然后将铁鞋上连接的 沉重锁链栓在车辆的踏板上,联控汇报后,才算防溜作业完毕。 此过程效率低下浪费时间, 进而影响车辆的周转速度乃至影响铁路运输的整体时效性,而且爬到车列底下 作业时也 存在极大的工作安全隐患。 针对使用沉重锁链防盗的问题,国内早期研制出了三角锁扳动的防盗铁鞋,但因 为其设计上的 缺陷,使其容易出现故障并卡死在钢轨上,因此未能被广泛推广使用。后来 国内又出现了“智能铁鞋” 专门用于防盗,其原理是通过无线定位技术追踪定位铁鞋内的 电子芯片,以实现其防盗功能,这种技术非 常成熟。但单独就这一项技术的改进并不符合 现场管理需求,而且所谓“智能铁鞋”并不能解决防溜作业 效率低下、浪费时间、存在安全 隐患等现场关键技术问题。究其原因,是所谓“智能铁鞋”不能实现自动 上轨,并在钢轨上 自行前后运动以做好防溜或撤除防溜的工作。鞋机器人配套系统是针对铁鞋机器人专门 设计的一套辅助控制系统,两者能够实现高度智能协调匹配控制,以自动完成防溜作业。 随着国家经济快速发展,各个行业对铁路货物运输时效性的要求越来越高,国家 对企业安全工 作的要求也越来越高,鉴于此,发明设计一套可以解决防溜作业效率低下、 浪费时间、存在劳动安全隐患 问题的铁鞋机器人及其铁鞋机器人配套系统势在必行。因 此,铁鞋机器人配套系统的设计从实际需求出发, 采用主流的人工智能技术,充分利用铁 路钢轨基础设备的优势进行最简单实用化的设计,以锂电池提供电 能、通过单片机芯片运 算处理、在单片机外围设备的辅助下控制电机驱动,完成铁鞋机器人及其铁鞋机器 人配套 系统实施防盗防溜的作业,彻底解放人力,杜绝安全隐患。此外,在冬季极其严寒和夏季极 度酷热 或其它极其恶劣的工作环境中,或在溜逸事故应急抢救的情况下,铁鞋机器人及其 铁鞋机器人配套系统的 使用,不但可以代替人力实施防溜作业,而且能够达到精准快速的 效果。
技术实现要素:
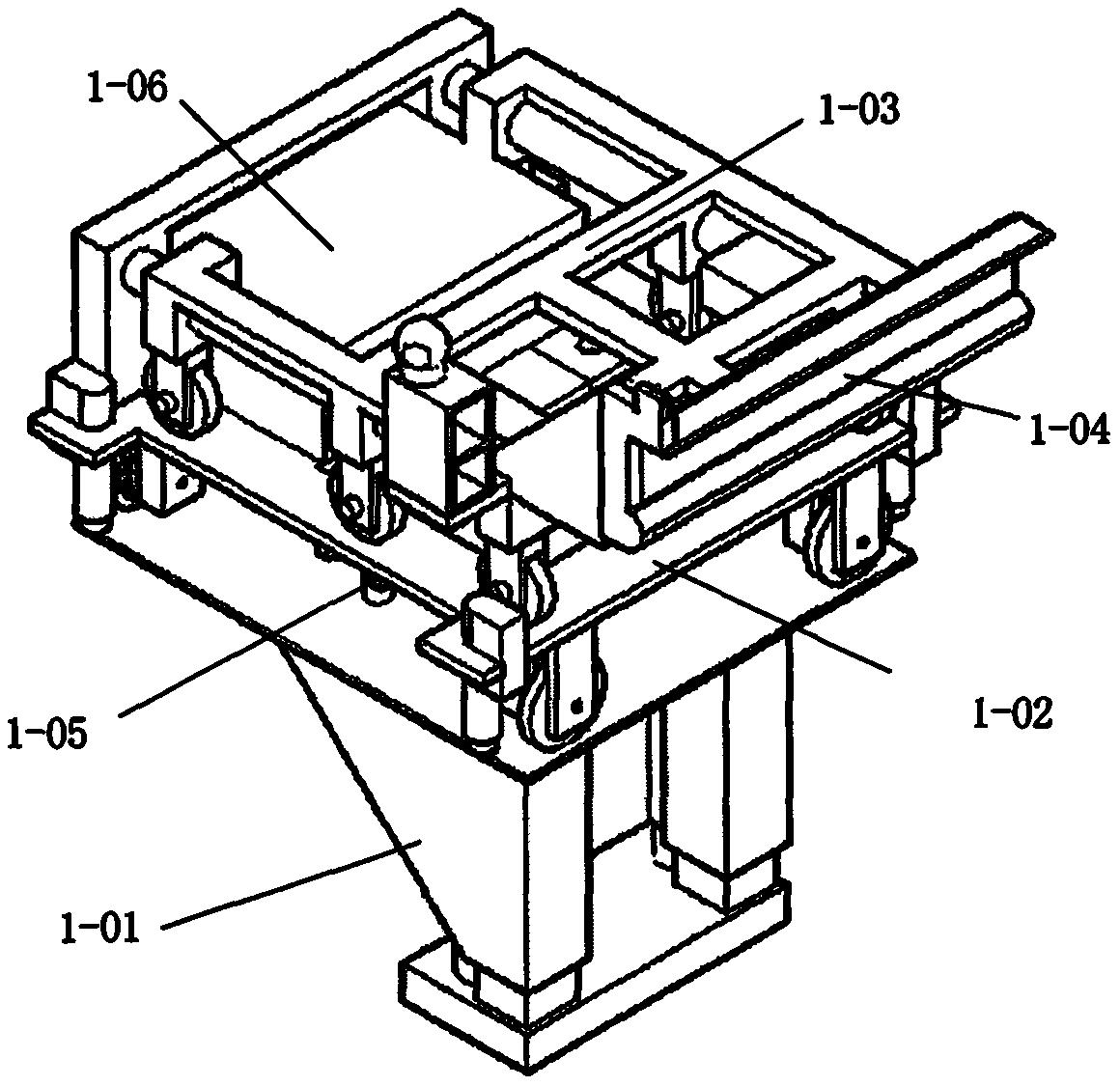
本发明实施例提供的铁鞋机器人配套系统,可以自动高效的完成铁鞋防溜作业, 有效解决了传 统防溜作业实施中效率低下、浪费时间的技术问题,解放了部分人体劳动 力,杜绝了一类铁路劳动安全隐 患。 为达到上述目的,本发明实施例采用如下技术方式。 本发明针对铁路各车场车列实施防溜效率低下,影响车辆周转时效,存在安全隐 9 CN 111547097 A 说 明 书 2/12 页 患的问题,公 布了一款通过人工智能技术控制铁鞋机器人配套系统完成铁鞋机器人自动 实施防溜的技术设备,本发明铁 鞋机器人配套系统工作原理主要由铁鞋走行车控制模块 提供电能并对铁鞋走行车升降器、铁鞋走行车、铁 鞋平推架、铁鞋走行锁的动作进行协调 控制,使其能够自行从地基下的铁鞋箱内通过铁鞋走行车升降器运 动至地面,通过铁鞋走 行锁实现铁鞋走行车升降器与铁鞋走行车的联锁和分离,通过铁鞋平推架将铁鞋装 载器 上的铁鞋机器人送至钢轨上,最后铁鞋走行车原路返回至铁鞋箱。 具体的,所述铁鞋走行车升降器包括升降底座、方形伸缩杆、方形伸缩套、支撑板、 圆形伸缩 管、圆形伸缩套、升降伸缩驱动、升降器平板、走行锁伸缩驱动,主要用于完成所 述铁鞋走行车的升降任 务;所述升降底座固定于地基之中,位于铁鞋箱底部,所述方形伸 缩杆一端连接固定所述升降底座,另一 端嵌套在所述方形伸缩套之内,并能够与所述方形 伸缩套做伸缩运动,所述方形伸缩套顶端与所述圆形伸 缩套和所述升降器平板固定连接, 所述方形伸缩套底端能够与所述方形伸缩杆嵌套耦合,所述圆形伸缩管 嵌套在所述圆形 伸缩套之内,与所述圆形伸缩套耦合,所述圆形伸缩套与所述升降伸缩驱动固定连接在一 起,所述升降伸缩驱动由电机、齿轮、限位开关、导线、丝杆组成,应用了杠杆原理将电机转 动的小力转 变为推动所述铁鞋走行车升降器升降运动的大力,用于为所述铁鞋走行车升 降器提供升降动力,所述支撑 板连接固定所述方形伸缩套、所述圆形伸缩套、所述升降器 平板、所述走行锁伸缩驱动,使所述铁鞋走行 车升降器结构稳定,在所述升降伸缩驱动通 电后,所述圆形伸缩套在所述圆形伸缩管的反作用力的支撑下, 与所述支撑板、所述方形 伸缩套、所述圆形伸缩套、所述升降器平板、所述走行锁伸缩驱动一起平稳上升 或下降;所 述升降器平板留有两个圆孔,用于所述走行车锁管通过,所述升降器平板通过所述走行驱 动轮 对承载所述铁鞋走行车,所述走行锁伸缩驱动安装固定在所述支撑板上,并通过所述 走行车锁管与所述走 行车锁槽联锁耦合。 所述铁鞋走行车包括走行板、接地锚套、连接臂、连接孔、接地锚、接地锚伸缩驱 动、接地锚 伸缩套、接地锚伸缩管、走行驱动、走行驱动固定壁、走行驱动轮对、走行驱动中 转齿轮、走行驱动轴、 走行驱动电机齿轮、走行驱动导线孔、走行驱动电机、红外探测感应 模块,主要用于载着所述铁鞋平推架、 所述铁鞋装载器和铁鞋机器人在两股道间前后运 动;所述走行板与所述接地锚套、所述连接臂、所述走行 驱动、所述红外探测感应模块、所 述铁鞋走行车控制模块、所述走行车锁槽固定连接,所述连接孔位于所 述连接臂上,用于 安装固定所述平推伸缩管,进而使所述铁鞋平推架与所述铁鞋走行车连接在一起,所述 连 接臂能够在所述铁鞋平推架伸缩过程中提供反作用力;所述接地锚安装固定在所述接地锚 套上,用于在 所述铁鞋平推架平推作业前,升起所述铁鞋走行车并使走行驱动轮对与地面 分离,进而使所述铁鞋走行车 较牢靠的固定在地面,以便所述铁鞋平推架伸缩作业精准完 成;所述接地锚套与所述走行板固定连接为一 体,所述接地锚伸缩驱动固定安装在所述接 地锚伸缩套上,所述接地锚伸缩套与所述接地锚伸缩管嵌套耦 合,所述接地锚伸缩套用于 同所述接地锚伸缩管做伸缩运动,所述接地锚伸缩管接地一端能够与地面产生 较大的摩 擦力;所述接地锚伸缩驱动由电机、齿轮、限位开关、导线、丝杆组成,应用了杠杆原理将电 机 转动的小力转变为推动所述铁鞋走行车做升降运动的大力,用于为所述接地锚提供升 降动力,所述接地锚 伸缩驱动通电后,能够推动所述接地锚伸缩管前进并顶在地面上,通 过地面的反作用力使所述接地锚及与 之固定连接的走形板平稳上升;所述走行驱动由所 10 CN 111547097 A 说 明 书 3/12 页 述走行驱动固定壁、所述走行驱动轮对、所述走行驱动 中转齿轮、所述走行驱动轴、所述走 行驱动电机齿轮组成,所述走行驱动固定壁安装固定在所述走行板下, 所述走行驱动轮对 与所述走行驱动中转齿轮、所述走行驱动轴三者固定连接在一起,所述走行驱动轴安装 固 定在所述走行驱动固定壁上,并能够带动所述走行驱动中转齿轮和所述走行驱动轮对一起 转动,所述走 行驱动电机齿轮安装在所述走行驱动电机的转动轴上,所述走行驱动中转齿 轮能够与所述走行驱动电机齿 轮啮合转动,所述走行驱动导线孔用于为所述走行驱动电 机安装导线,使所述走行驱动电机通电后转动, 所述走行驱动电机安装固定在所述走行驱 动固定壁上,所述走行驱动电机由微型电动机和齿轮变速器组 成,在所述走行驱动电机通 电后,能够带动所述走行驱动电机齿轮、所述走行驱动轴、所述走行驱动中转 齿轮和所述 走行驱动轮对一起转动,为所述铁鞋走行车提供前后运动的动力;所述红外探测感应模块 安装 固定在所述走行板上,用于为所述铁鞋走行车运动导向,即所述红外探测感应模块能 够寻着地面上的黑漆 线前后运动。 所述铁鞋平推架包括平推板、平推轮支座、平推伸缩管、平推伸缩套、平推伸缩驱 动、雷达超 声测距模块、雷达超声测距器、测距器保护壳、测距器底座、平推轮、平推轮固定 壁、平推轮对、平推轮 轴、无线摄像头,主要用于将所述铁鞋装载器上的铁鞋机器人推送至 钢轨上;所述平推板与平推轮支座、 平推伸缩套、平推伸缩驱动、雷达超声测距模块、平推 轮连接固定在一起,所述平推伸缩管一端通过所述 连接孔与所述连接臂固定连接,用于连 接所述铁鞋平推架与所述铁鞋走行车;所述平推轮支座固定连接在 所述平推板下面,并与 所述平推伸缩套固定连接,所述平推伸缩套、所述平推轮支座和所述平推板固定连 接在一 起,所述平推伸缩套与所述平推伸缩管嵌套耦合,并能够在所述平推伸缩驱动的驱动下做 伸缩运动; 所述平推伸缩驱动由电机、齿轮、限位开关、导线、丝杆组成,应用了杠杆原理将 电机转动的小力转变为 推动所述铁鞋平推架和所述铁鞋装载器做伸缩运动的大力,用于 实现所述铁鞋装载器将铁鞋机器人送上钢 轨的目的;在所述平推伸缩驱动通电后,所述平 推伸缩驱动推动所述平推伸缩管顶向所述连接臂,所述连 接臂给所述平推伸缩管及其整 个所述铁鞋平推架在所述平推轮转动下向前运动,直至所述平推伸缩驱动的 限位开关被 触碰后停止前进;所述平推轮由所述平推轮固定壁、所述平推轮对、所述平推轮轴三部分组 成, 所述平推轮安装固定在所述平推轮支座上,用于支撑所述铁鞋平推架所受重力;所述 平推轮固定壁与所述 平推板固定连接在一起,用于安装所述平推轮轴,所述平推轮对与所 述平推轮轴固定连接在一起并能够同 轴转动,所述平推轮用于承载所述铁鞋平推架的重 力并在所述平推伸缩驱动的推拉力下前后运动;所述雷 达超声测距模块由所述雷达超声 测距器、所述测距器保护壳、所述测距器底座三部分组成,所述雷达超声 测距器安装固定 在所述测距器保护壳内部;所述测距器保护壳与所述测距器底座固定连接,用于保护所述 雷达超声测距器;所述测距器底座与所述平推板固定连接在一起,所述雷达超声测距模块 工作时,所述雷 达超声测距器不断发出并接收超声波,并将信息发送所述铁鞋走行车控制 模块进行测算,从而得出所述铁 鞋走行车与钢轨的距离;所述无线摄像头安装固定在所述 测距器保护壳之上,用于远程确认铁鞋机器人的 防溜工作状态。 所述铁鞋装载器包括钢轨轨头限位壳、钢轨轨头移动侧壁、装载轨面、铁鞋机器人 永磁挡板、 铁鞋机器人红外探测挡板、铁鞋装载器支撑板,主要用来装载铁鞋机器人并将 铁鞋机器人运送至钢轨上; 所述钢轨轨头限位壳、所述钢轨轨头移动侧壁、所述装载轨面 11 CN 111547097 A 说 明 书 4/12 页 三者固定浇筑为一体,所述钢轨轨头限位壳 能够与钢轨轨头密贴匹配,所述钢轨轨头移动 侧壁能够容许钢轨轨头位于所述钢轨轨头限位壳与所述装载 轨面之间,即所述铁鞋装载 器只能在80mm高度的范围内升降移动;所述铁鞋机器人永磁挡板与所述铁鞋 装载器支撑 板、所述装载轨面固定连接在一起,所述铁鞋机器人永磁挡板内部嵌有永磁铁,用于同铁鞋 机 器人尾端的永磁铁相吸,一方面能够使所述铁鞋装载器装载铁鞋机器人运动时两者密 贴,另一方面通过两 磁铁相吸精准确定铁鞋机器人在所述铁鞋装载器上的位置,进而能够 配合铁鞋机器人专用充电装置对其实 施充电;所述铁鞋机器人红外探测挡板安装固定在 所述铁鞋机器人永磁挡板之上,专门用于同铁鞋机器人 的红外探测模感应块对接信息,即 所述铁鞋机器人红外探测挡板被铁鞋机器人的红外探测感应模块探测到 时,铁鞋机器人 停止运动;所述铁鞋装载器支撑板与所述钢轨轨头限位壳、所述钢轨轨头移动侧壁、所述 装载轨面、所述铁鞋机器人永磁挡板固定连接在一起,使所述铁鞋装载器结构稳固。 所述铁鞋走行锁包括走行车锁槽、走行车锁管、伸缩平齿条、伸缩方套、伸缩方套 槽、导线孔、 限位桩、走行锁伸缩驱动电机、走行锁伸缩驱动电机齿轮、走行锁伸缩驱动中 转齿轮、走行锁伸缩驱动壁、 走行锁伸缩驱动轴,主要用于联锁和分离所述铁鞋走行车升 降器和所述铁鞋走行车;所述走行车锁槽安装 固定在所述走行板上,其槽外为广口形,槽 内为半圆柱形,槽内的半圆柱形能够与所述走行车锁管匹配耦 合,用于卡住两个所述走行 车锁管,使所述铁鞋走行车不能与所述铁鞋走行车升降器分离;所述走行车锁 管与所述伸 缩平齿条固定相连,所述伸缩平齿条与所述伸缩方套嵌套匹配;所述伸缩平齿条一侧的平 齿能 够与所述走行锁伸缩驱动中转齿轮啮合转动,并能够在所述走行锁伸缩驱动中转齿 轮的转动下使所述伸缩 平齿条前后运动;所述伸缩方套与所述支撑板固定连接在一起,所 述伸缩方套上设有所述伸缩方套槽、所 述导线孔、所述走行锁伸缩驱动壁、所述走行锁伸 缩驱动电机,所述导线孔用于通过导线为所述走行锁伸 缩驱动电机提供驱动电力,所述限 位桩位于所述伸缩平齿条上,能够在所述伸缩方套槽内运动,并在所述 伸缩方套槽两侧触 动限位开关;所述走行锁伸缩驱动电机安装在所述走行锁伸缩驱动壁内,所述走行锁伸 缩 驱动电机的转动轴上安装有所述走行锁伸缩驱动电机齿轮,所述走行锁伸缩驱动轴安装在 所述走行锁伸 缩驱动壁上,所述走行锁伸缩驱动中转齿轮与所述走行锁伸缩驱动轴固定 连接为一体,并能够同时转动, 所述走行锁伸缩驱动中转齿轮能够与所述走行锁伸缩驱动 电机齿轮和所述伸缩平齿条的一侧平齿啮合转 动,进而推动所述伸缩平齿条以及所述走 行车锁管做伸缩运动,完成所述铁鞋走行车升降器和所述铁鞋走 行车的联锁和分离。 所述铁鞋走行车控制模块包括电源供电模块、专用充电插孔模块、控制模块保护 壳、中心处理 模块、遥控接收模块、走行锁伸缩驱动控制模块、升降伸缩驱动控制模块、走 行驱动控制模块、接地锚伸 缩驱动控制模块、平推伸缩驱动控制模块、红外探测感应处理 模块、雷达超声测距处理模块、无线定位模 块,主要用于控制铁鞋机器人配套系统协调动 作,自动完成防溜作业;所述电源供电模块位于所述控制模 块保护壳之内,主要由外部保 护壳、内部电池组和导线线路组成,用于为铁鞋机器人配套系统提供电能, 所述专用充电 插孔模块安装在所述控制模块保护壳之上,所述专用充电插孔模块主要由弹簧接触桩、绝 缘 保护和永磁外壳组成,用于通过专用充电装置自动完成所述铁鞋机器人配套系统的充 电过程,所述控制模 块保护壳与所述走行板固定连接,用于保护所述电源供电模块、所述 中心处理模块、所述遥控接收模块、 所述走行驱动控制模块、所述平推伸缩驱动控制模块; 12 CN 111547097 A 说 明 书 5/12 页 所述中心处理模块位于所述控制模块保护壳之内, 用于接收所述遥控接收模块、所述走行 锁伸缩驱动控制模块、所述升降伸缩驱动控制模块、所述走行驱动 控制模块、所述平推伸 缩驱动控制模块、红外探测感应处理模块和雷达超声测距处理模块发送的信息,并 将处理 后的信息反馈给所述遥控接收模块、所述走行锁伸缩驱动控制模块、所述升降伸缩驱动控 制模块、 所述走行驱动控制模块、所述平推伸缩驱动控制模块;所述遥控接收模块位于所 述控制模块保护壳之内, 用于接收外部遥控器发送的信息指令,并能够将部分所述中心处 理模块的处理信息发送给遥控器;所述走 行锁伸缩驱动控制模块安装在所述支撑板上,用 于控制所述走行锁伸缩驱动动作,实现所述铁鞋走行车升 降器和所述铁鞋走行车连锁和 分离的目的,所述接地锚伸缩驱动控制模块位于所述控制模块保护壳之内, 用于控制所述 接地锚伸缩驱动实现所述铁鞋走行车牢靠固定在地面的目的,所述升降伸缩驱动控制模块 安 装在所述支撑板上,用于控制所述升降伸缩驱动动作,实现所述铁鞋走行车升降器的升 降目的,所述走行 驱动控制模块位于所述控制模块保护壳之内,用于控制所述走行驱动实 现所述铁鞋走行车前后运动的目 的,所述平推伸缩驱动控制模块位于所述控制模块保护 壳之内,用于控制所述平推伸缩驱动实现前后伸缩 运动的目的,所述无线定位模块位于所 述控制模块保护壳之内,用于在必要时对所述铁鞋走行车进行定位 追踪。 本发明实施例所提供的铁鞋机器人配套系统,通过运用人工智能技术控制铁路车 列实施防溜作 业的过程,在硬件设计中充分利用钢轨的导向优势,来简化所述铁鞋机器人 配套系统的结构设计以节约制 造成本;最终实现所述铁鞋机器人配套系统与铁鞋机器人 自行完成防溜作业的目的,进而解放人的体力劳 动,杜绝劳动安全隐患,提高作业效率。具 体的,以所述铁鞋机器人配套系统完成一个防溜作业流程为例, 当需要做防溜且具备做防 溜的条件时,所述铁鞋机器人配套系统的所述中心处理模块接收到远程控制信 号,控制位 于地基之下的铁鞋箱门自动打开,所述升降伸缩驱动控制模块控制所述铁鞋走行车升降器 载着 铁鞋机器人从铁鞋箱内升起,直至所述升降器平板与地面齐平;所述走行锁伸缩驱动 控制模块控制所述走 行车锁管从所述走行车锁槽内缩回以打开所述铁鞋走行锁,使所述 铁鞋走行车升降器与所述铁鞋走行车能 够达到分离条件;所述走行驱动控制模块控制所 述走行驱动带动所述走行驱动轮对转动,此时所述红外探 测感应模块通过与所述中心处 理模块通信,进而控制所述铁鞋走行车在两股道间沿着黑漆线方向向前运 动,直至所述铁 鞋走行车运动至需要做防溜的车列轮对附近,所述走行驱动控制模块控制所述走行驱动轮 对停止转动;所述接地锚伸缩驱动控制模块控制所述接地锚伸缩驱动推动所述接地锚伸缩 管顶向地面,使 所述走行驱动轮对与地面分离且所述铁鞋走行车牢靠固定在地面,同时在 所述雷达超声测距模块测到的距 离满足所述铁鞋走行车与钢轨之间的距离时,所述接地 锚伸缩驱动控制模块控制所述接地锚伸缩驱动停止 动作;所述平推伸缩驱动控制模块控 制所述平推伸缩驱动推动所述铁鞋装载器向钢轨方向运动,直至到达 所述平推伸缩驱动 的限位开关转换时,此时所述铁鞋装载器刚好与钢轨轨头侧面在所述铁鞋装载器前进方 向密贴匹配,所述接地锚伸缩驱动控制模块控制所述接地锚伸缩驱动回缩下降,使所述铁 鞋装载器刚好与 钢轨轨面上密贴匹配;铁鞋机器人自行从所述铁鞋装载器上运动至钢轨 并自动完成防溜作业,此时,通过 所述无线摄像头对铁鞋机器人防溜状态进行确认;所述 平推伸缩驱动控制模块控制所述铁鞋平推架复位, 所述升降伸缩驱动控制模块控制所述 铁鞋走行车升降器复位,所述走行驱动控制模块控制所述铁鞋走行车 回到所述铁鞋走行 13 CN 111547097 A 说 明 书 6/12 页 车升降器上,所述走行锁伸缩驱动控制模块控制所述走行锁伸缩驱动,使所述走行车锁 管 运动至所述走行车锁槽内实现联锁,所述升降伸缩驱动控制模块控制所述升降伸缩驱动复 位,使所述铁 鞋走行车回到铁鞋箱内,铁鞋箱门自动关闭;待防溜作业完毕,铁鞋机器人配 套系统自行运动至铁鞋机器 人原来离开所述铁鞋装载器的地方,并使所述铁鞋装载器与 钢轨轨面密贴,在铁鞋机器人运动至所述铁鞋 装载器上后,铁鞋机器人配套系统载着铁鞋 机器人自行回到铁鞋箱内;此时专用充电装置将自动检查所述 铁鞋机器人配套系统的所 述电源供电模块电量情况,如电量不足,则通过所述专用充电插孔模块完成所述 铁鞋机器 人配套系统的充电过程。相对于传统铁鞋防溜作业,所述铁鞋机器人配套系统节约了劳动 力,解 放了人的体力劳动,增强了作业安全系数,极大提高了作业效率,进而可以加速铁路 货运周转速度以提高 货运时效性。目前全国铁路大部分车站都使用传统铁鞋实施防溜,而 所述铁鞋机器人配套系统构造相对简 单,造价成本较低,使用技术非常成熟,具备非常强 的推广使用价值,对全国铁路运输时效和作业安全系 数提高具有重要意义。 附图说明 为了更清楚的说明本发明实施例中的技术方案,下面将对本实施例中所需要使用 的附图作简单 地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于 本领域普通技术人员来讲,在 不付出创造性劳动的前提下,还可以根据这些附图获得其他 附图。 图1为本发明实施例提供的铁鞋机器人配套系统结构示意图。 图2为本发明实施例提供的铁鞋走行车升降器1-01结构示意图。 图3为本发明实施例提供的铁鞋走行车1-02结构示意图。 图4为本发明实施例提供的铁鞋平推架1-03结构示意图。 图5为本发明实施例提供的铁鞋装载器1-04结构示意图。 图6为本发明实施例提供的铁鞋走行锁1-05结构示意图。 图7为本发明实施例提供的铁鞋走行车控制模块1-06结构示意图。 图8为本发明实施例提供的铁鞋走行车控制模块原理示意图。 其中,附图中各个标号的含义:铁鞋走行车升降器1-01、铁鞋走行车1-02、铁鞋平 推架1-03、 铁鞋装载器1-04、铁鞋走行锁1-05、铁鞋走行车控制模块1-06、升降底座2-01、 方形伸缩杆2-02、方形 伸缩套2-03、支撑板2-04、圆形伸缩管2-05、圆形伸缩套2-06、升降 伸缩驱动2-07、升降器平板2-08、 走行锁伸缩驱动2-09、走行板3-01、接地锚套3-02、连接 臂3-03、连接孔3-04、接地锚3-05、接地锚 伸缩驱动3-06、接地锚伸缩套3-07、接地锚伸缩 管3-08、走行驱动3-09、走行驱动固定壁3-10、走行驱 动轮对3-11、走行驱动中转齿轮3- 12、走行驱动轴3-13、走行驱动电机齿轮3-14、走行驱动导线孔3-15、 走行驱动电机3-16、 红外探测感应模块3-17、平推板4-01、平推轮支座4-02、平推伸缩管4-03、平推伸 缩套4- 04、平推伸缩驱动4-05、雷达超声测距模块4-06、雷达超声测距器4-07、测距器保护壳4-08、 测 距器底座4-09、平推轮4-10、平推轮固定壁4-11、平推轮对4-12、平推轮轴4-13、无线摄 像头4-14、 钢轨轨头限位壳5-01、钢轨轨头移动侧壁5-02、装载轨面5-03、铁鞋机器人永磁 挡板5-04、铁鞋机器人 红外探测挡板5-05、铁鞋装载器支撑板5-06、走行车锁槽6-01、走行 车锁管6-02、伸缩平齿条6-03、伸 缩方套6-04、伸缩方套槽6-05、导线孔6-06、限位桩6-07、 14 CN 111547097 A 说 明 书 7/12 页 走行锁伸缩驱动电机6-08、走行锁伸缩驱动 电机齿轮6-09、走行锁伸缩驱动中转齿轮6- 10、走行锁伸缩驱动壁6-11、走行锁伸缩驱动轴6-12、电源 供电模块7-01、专用充电插孔模 块7-02、控制模块保护壳7-03。











