
技术摘要:
本发明属于集成电路技术领域,具体为一种柔性皮肤刺激器。本发明柔性皮肤刺激器包括:由若干刺激单元构成的刺激阵列,输出信号直接作用于受体,同时将信号传递给运算存储终端,控制刺激阵列的栅极偏置电压输入的控制电路;运算存储终端,其输出端与控制电路相连,用以 全部
背景技术:
随着信息时代的应用需求越来越高,面对越来越多的特殊信号和特殊环境下气 体、压力、湿度等的测量,新型传感器技术逐渐向微小型化、智能化、延展柔性化、便携可穿 戴趋势发展。随着柔性基质材料的发展,柔性传感器成为新一代传感器重要发展方向之一, 逐渐运用到医学诊断、电子皮肤、智能家居等方方面面。 触觉是自然界中大多数生物获取外部环境信息的重要方式之一,而人类依靠皮肤 表面的神经细胞来感知外部环境中的信息,包括空气中的温度和湿度、皮肤表面感知到的 疼痛和振动等。同时,人类触觉是依靠表皮组织的触觉感受器来感知的,将感知到的信息经 过神经细胞反馈给人类自身。将人工皮肤应用到机器人中,使机器人拥有获取外部环境信 息能力的触觉,可以极大提高机器人的智能化水平,特别地与听觉和视觉不同的是,触觉能 够使得机器人感知被接触物体表面形状、表面粗糙度和物体的材质等。因此,人工触觉信息 的精确传导和柔性器件的设计制备对于提髙机器人智能化水平而言是至关重要的,它可以 帮助机器人在执行任务的过程中,不仅可以对目标物体进行检测和识别,而且还可以对不 可预知的障碍物进行主动规避,有利于帮助机器人在环境条件恶劣的条件下顺利完成任 务。 柔性皮肤刺激器不仅可用于构成智能机器人的人工触觉,还可以用于与皮肤组织 或穴位相接触来治疗各种疾病。近年来,国内外对电刺激生物反馈康复治疗方法在产后盆 底肌锻炼等方面的应用给予了高度关注,且部分研究已经认可了该方法的干预效果。但早 期出现的刺激电极也几乎是以金属材料和半导体材料为主,这两类材料具备优越的导电性 能,但其硬度远高于生物组织,具有一定的局限性。 现有技术所制成的皮肤刺激器或多或少都存在一些难以攻克的问题,难以兼具制 备成本低、工艺制作简便、智能调谐、柔性便携和高灵敏度的特点,例如:在材料方面,不能 兼具柔韧性和伸展性等要求;在制备工艺上,无法将传感器大面积地附着在机器人体表等, 并且难以做到柔性贴附和便于穿戴;在传感功能方面,灵敏度低和不具备多维检测能力等 缺陷;极大限制了皮肤刺激器的发展和应用。
技术实现要素:
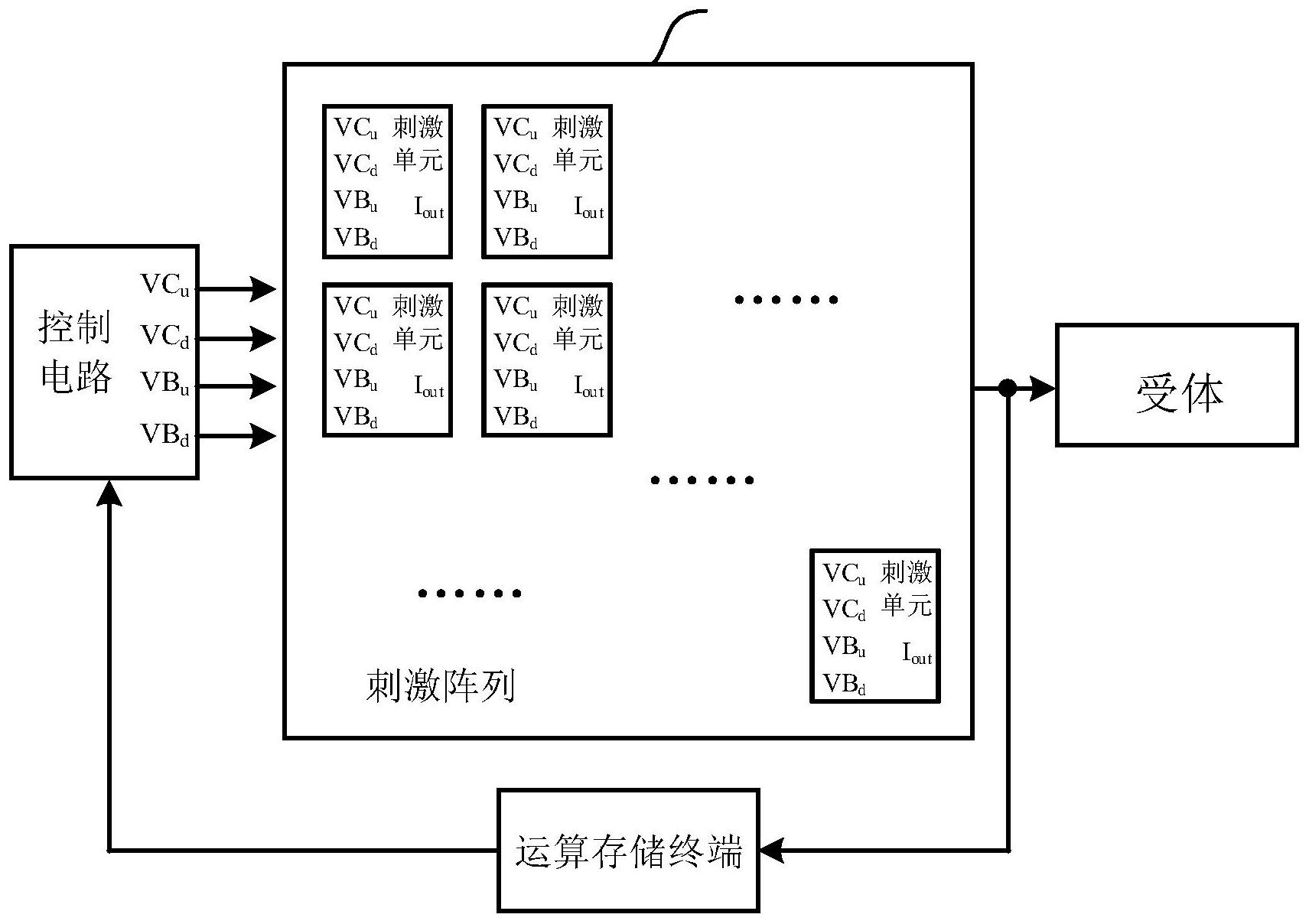
本发明的目的在于提出一种高灵敏度,且便携的柔性皮肤刺激器。 本发明提供的柔性皮肤刺激器,其电路整体结构如附图2所示,包括一个提供偏置 电压的控制电路、一个m行n列刺激单元构成的刺激阵列和一个存储信号的运算存储终端; 控制电路根据触觉信号的变化调控刺激阵列的各晶体管的栅极偏置电压大小,刺激阵列与 受体接触,产生电刺激给受体,即实现将触觉信息精准传导给皮肤;所述运算存储终端对刺 激阵列的输出信号进行存储,并提供反馈信号给控制电路,实现对刺激单元中晶体管的栅 3 CN 111578969 A 说 明 书 2/3 页 极电压进行智能调谐的功能,即控制电路、刺激阵列和运算存储终端构成反馈回路,对触觉 信号的判断具有较高灵敏度,达到模拟人体皮肤对触觉变化感知的效果。 本发明中,所述控制电路和刺激阵列均为二维材料构建的电路,且可集成在一个 晶圆上,集成电路在人工皮肤上的应用有利于人机交互,因此所述柔性皮肤刺激器具有体 积小、柔性便携、人机交互的特点。 本发明中,所述刺激单元的内部电路结构如附图1所示,包含4个栅极偏置电压可 调的晶体管,由控制电路提供的4个偏置电压控制这4个晶体管的工作状态。刺激单元根据 不同的栅极偏置电压产生不同的输出信号,用来模拟皮肤对外界触觉的感知。具体为触觉 信息的改变可以改变刺激单元中各晶体管的等效电阻和流过的电流等参数,使得不同的触 觉信号对应晶体管的不同输出。 本发明中,所述控制电路根据不同的触觉信息输出不同的偏置电压大小,偏置电 压有多种可调状态,且控制精度高,可以准确地将触觉信息传导给各刺激阵列,可以用来模 拟皮肤对变化的触觉信息的感知。 本发明通过刺激阵列与受体间的接触,将触觉信息转化为受体可分辨的电学信 号,实现人工触觉信息的精确传导,控制电路依据运算存储终端的反馈信号实现智能调谐 的功能,兼具只能调谐、高灵敏度和柔性便携的优势。本发明解决了传统皮肤刺激器体积过 大且不具备柔性的问题,将触觉信息传导给皮肤,起到人工触觉的效果,可用于医学诊疗、 电子皮肤等多个领域。 附图说明 图1为柔性皮肤刺激器单元的结构示意图。 图2为柔性皮肤刺激器结构示意图。











