
技术摘要:
一种用于海上风电场巡检的水面无人艇改进GA‑SA路径规划方法,本发明涉及水面无人艇路径规划方法。本发明的目的是为了解决现有算法效率低下,精度较低的问题。过程为:一、初始化算法参数;二、进行可行解的染色体编码,设置适应度值函数;三、将适应度值最高的作为最 全部
背景技术:
水面无人艇(Unmanned Surface Vehicle,USV)是几大无人载体中的其中一类,但 是较无人机,无人车和无人水下航行器发展的较晚。同有人舰艇相比,水面无人艇凭借其无 人、体积小、高速等典型优点,可以更高效的完成一些民用和科考任务,如海洋资源勘探,海 洋地理信息收集,海图绘制和海上搜救等,同时也能完成多种军事任务,如海上情报收集, 重点海域监测,排雷作业,反潜探测,反恐突击等[1-3]([1]Li M .,He Y .,Ma Y .,et al.Design and implementation of a new jet-boat based unmanned surface vehicle [C].Proceedings of International Conference on Automatic Control&Artificial Intelligence,Xiamen,China,2012:768-771.)([2]Villa J L.,Paez J.,Quintero C.,et al .Design and control ofan unmanned surface vehicle for environmental monitoring applications[C].Proceedings ofRobotics&Automation,Bogota,Colombia, 2017:1-5.)([3]Specht C.,Switalski E.,Specht M.Application of an autonomous/ unmanned survey vessel(ASV/USV)and bathymetric measurements[J].Polish Marine Research,2017,24(3):36-44.),如图1所示。 全局路径规划是指建立在目前已知的环境基础上,根据一定的评价指标和避碰准 则,对全局路径所作出的规划。但是目前所采用的一些传统算法虽然其计算简单、易于操 作,但效率低下,计算结果精度较低,而若采用仿生算法等先进算法,虽然计算精度大大提 高,但计算更为繁琐。 因此,本发明针对无人艇的海上风电场巡检的全局路径规划问题,提出一种用于 海上风电场巡检的水面无人艇改进GA-SA路径规划方法。
技术实现要素:
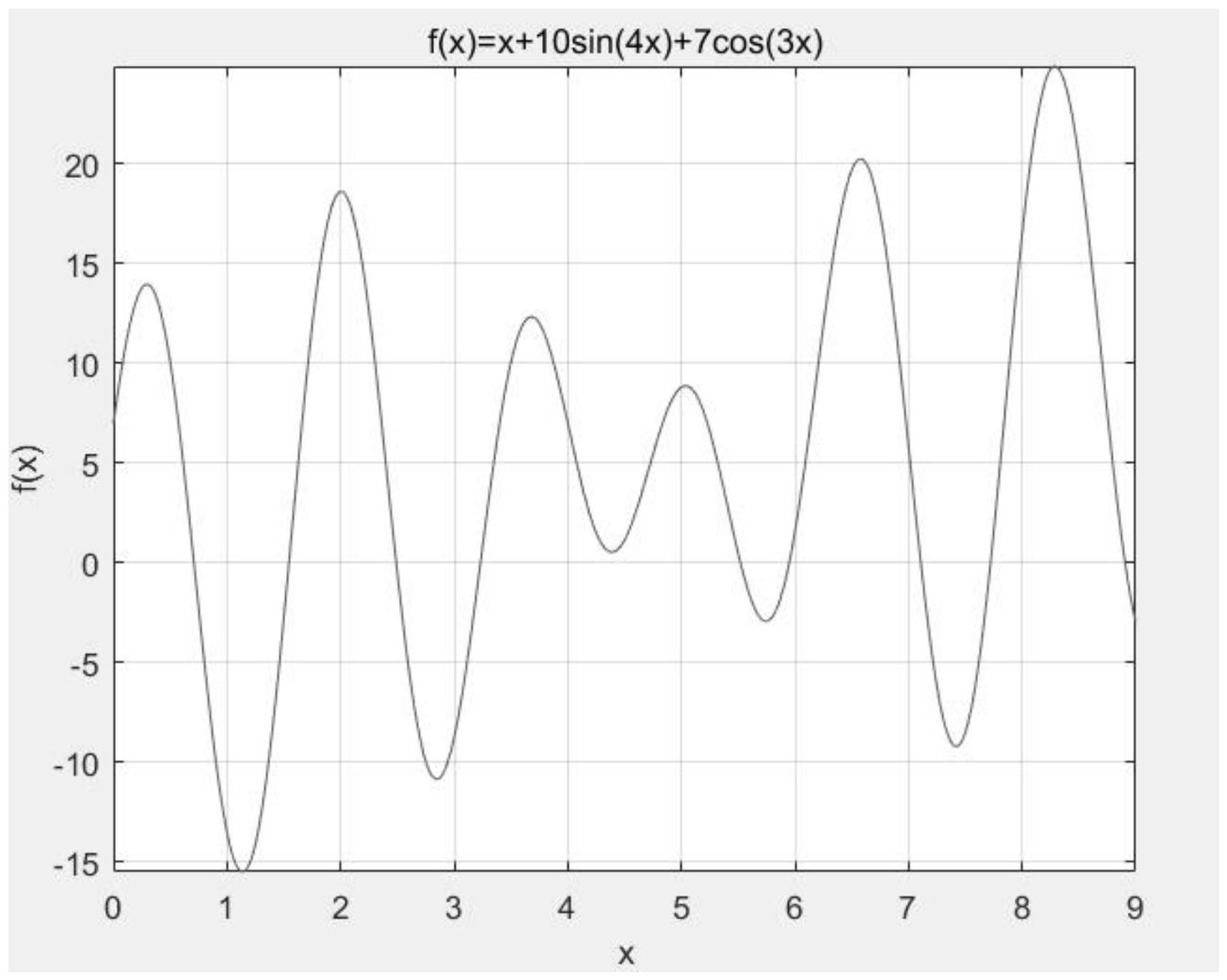
本发明的目的是为了解决现有算法效率低下,精度较低的问题,而提出一种用于 海上风电场巡检的水面无人艇改进GA-SA路径规划方法。 一种用于海上风电场巡检的水面无人艇改进GA-SA路径规划方法具体过程为: 步骤一、初始化改进遗传模拟退火算法的各个参数,包括种群规模、自适应交叉、 变异算子、初始温度、降温系数、马尔科夫链长和截止温度; 步骤二、根据问题解的特性,进行染色体编码操作,设置适应度值函数; 步骤三、将所有染色体解码,并计算所有个体的适应度值,选择当前适应度最高的 个体为最优个体; 步骤四、判断当前种群是否满足收敛条件,若满足收敛条件,则算法结束,输出当 前最优个体;若不满足条件,则进入进化阶段,执行选择,交叉,变异操作; 4 CN 111612217 A 说 明 书 2/11 页 步骤五、将进化后的新一代种群得到的最优值作为模拟退火算法的初始解,执行 步骤六; 所述最优值为当前适应度最高的个体; 步骤六、在步骤五中的新一代种群得到的最优值的邻域内产生一个随机扰动,得 到一个更新解;判断更新解与最优解的能量变化; 若更新解的能量小于最优解的能量,则更新解替换最优解,得到当前的最新解; 若更新解的能量大于等于最优解的能量,则按概率 保留更新解,保 留的更新解为当前的最新解; 式中ΔEk为能量的变化值,T为当前温度; 步骤七、判断当前的最新解是否达到模拟退火算法的收敛条件,若没有达到,则重 复步骤六;若达到,则将当前的最新解返回步骤三替换步骤三中的当前适应度最高的个体, 重复执行步骤四至步骤七,直到满足遗传算法收敛条件。 本发明的有益效果为: 本发明首先分别对遗传算法和模拟退火的算法进行了介绍,分别分析其优缺点。 然后根据其优缺点分别对遗传算法和模拟退火算法进行了改进。针对遗传算法中固定的交 叉、变异算子不适用于全部进化过程的问题,提出了自适应交叉、变异算子,并通过求函数 极值的仿真实验验证其有效性和优越性。其次针对模拟退火算法前期收敛速度过慢的问 题,提出了自适应降温系数,加速前期算法收敛,并通过求解TSP问题的仿真实验验证了其 有效性和优越性。最后利用改进遗传算法对在海上风电场问题中的USV全路径规划进行了 仿真实验,并与单独利用传统遗传算法和传统模拟退火算法进行了对比,该方法进行的路 径规划结果效率更高,从而验证了其优越性。解决现有传统算法虽然其计算简单、易于操 作,但效率低下,计算结果精度较低,以及现有仿生算法等先进算法,虽然计算精度大大提 高,但计算更为繁琐的问题。 由表2三种算法求解的结果,可以看到传统遗传算法求得的路径长度为16.95,传 统模拟退火算法求得的路径长度为17.37,可以看出遗传算法求得的结果比模拟退火算法 求得的结果略优,这是得益于遗传算法较强的全局空间搜索能力,但优化幅度仅为2%。而 采用改进遗传模拟退火算法求出的路径长度为15.51,优化幅度较遗传算法已经达到了 8%,由此可以看出本发明所提出的改进GA-SA算法较传统算法可以较大的提升算法精度。 基于以上分析,改进遗传模拟退火算法能很好的实现两种算法的优劣互补,最终提升算法 的精度。 附图说明 图1为水面无人艇示意图; 图2为f(x)函数图像; 图3a为传统遗传算法仿真解的初始位置图; 图3b为传统遗传算法仿真解的最终位置图; 图3c为传统遗传算法仿真最优函数值变化趋势图; 图4a为改进遗传算法仿真解的初始位置图; 5 CN 111612217 A 说 明 书 3/11 页 图4b为改进遗传算法仿真解的最终位置图; 图4c为改进遗传算法仿真最优函数值变化趋势图; 图5a为传统模拟退火算法仿真最终路线图; 图5b为传统模拟退火算法仿真路线长度变化趋势图; 图6a为改进模拟退火算法仿真最终路线图; 图6b为改进模拟退火算法仿真路线长度变化趋势图; 图7a为传统遗传算法仿真结果图; 图7b为传统模拟退火算法仿真结果图; 图8为改进算法仿真结果图。











